增量式编码器工作原理
增量式编码器工作原理
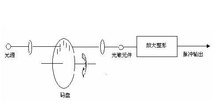
增量式角度数字编码器的工作原理:
(图片文字依次为:光源、码盘、光敏元件、放大整形、脉冲输出)
在一个码盘的边缘上开有相等角度的缝隙(分为透明和不透明部分),在开缝码盘两边分别安装光源及光敏元件。当码盘随工作轴一起转动时,每转过一个缝隙就产生一次光线的明暗变化,再经整形放大,可以得到一定幅值和功率的电脉冲输出信号,脉冲数就等于转过的缝隙数。将该脉冲信号送到计数器中去进行计数,从测得的数码数就能知道码盘转过的角度。
为了判断旋转方向 ,可以采用两套光电转换装置。令它们在空间的相对位置有一定的关系,从而保证它们产生的信号在 相位上相差1/4周期。
增量式编码器造价信息
增量式编码器转轴旋转时,有相应的脉冲输出,其旋转方向的判别和脉冲数量的增减借助后部的判向电路和计数器来实现。其计数起点任意设定,可实现多圈无限累加和测量。还可以把每转发出一个脉冲的Z信号,作为参考机械零位。编码器轴转一圈会输出固定的脉冲,脉冲数由编码器光栅的线数决定。需要提高分辨率时,可利用 90 度相位差的 A、B两路信号对原脉冲数进行倍频,或者更换高分辨率编码器。
按照工作原理编码器可分为增量式和绝对式两类。
增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。
绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
旋转增量式编码器以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。
解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确性的。为此,在工控中就有每次操作先找参考点,开机找零等方法。
比如,打印机扫描仪的定位就是用的增量式编码器原理,每次开机,我们都能听到噼哩啪啦的一阵响,它在找参考零点,然后才工作。
增量式编码器工作原理常见问题
-
增量式角度数字编码器的工作原理:(图片文字依次为:光源、码盘、光敏元件、放大整形、脉冲输出)在一个码盘的边缘上开有相等角度的缝隙(分为透明和不透明部分),在开缝码盘两边分别安装光源及光敏元件。当码盘随...
-
http://wenku.baidu.com/view/ce0d0b1fb7360b4c2e3f64fc.html 一、光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感...
-
电机编码器工作原理:编码器产生电信号后由数控制置电脑锣 、可编程逻辑控制器 、控制系统等来处理。这些传感器主要应用在下列方面:机床、材料加工、电动机反馈系统以及测量和控制设备。在编码器中角位移的转换采...
增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。
编码器是把角位移或直线位移转换成电信号的一种装置。前者称为码盘,后者称码尺.按照读出方式编码器可以分为接触式和非接触式两种.接触式采用电刷输出,一电刷接触导电区或绝缘区来表示代码的状态是"1"还是"0";非接触式的接受敏感元件是光敏元件或磁敏元件,采用光敏元件时以透光区和不透光区来表示代码的状态是"1"还是"0"。
增量式编码器工作原理文献

 DKV60_测量轮型增量编码器
DKV60_测量轮型增量编码器
分辨率 1...2,000 测量轮型增量编码器 DKV60测量轮型 增量编码器 DKV60 是为你“量身定做”的测量 轮编码器。 产品的主要技术特性: 电气输出接口: TTL/RS422 , HTL/ 推挽 测量轮的形式:金属轮毂表面 橡胶“O”形圈表面 1.5 m的电缆出线方式 DKV60 产品系列的多样性 ,保证了 以下应用的可靠性: 木工机械 钢铁行业的钢板输送机械 物流输送线 分拣系统 纺织机械 印刷和造纸机械等. ■ ■ ■ ■ ■ ■ DKV60 系列测量轮型增量编码器是 用于“输送线皮带”速度及位置测 量的结构紧凑、高性价比的解决方 案。 DKV60 测量轮型增量编码器可直接 安装在“皮带轮”上,无需其它任 何的附件。 DKV60 皮带轮编码器内置了 DKS40 增量型编码器。由于采用了先进的 “迷
 DKV60_测量轮型增量编码器 (2)
DKV60_测量轮型增量编码器 (2)
分辨率 1...2,000 测量轮型增量编码器 DKV60测量轮型 增量编码器 DKV60 是为你“量身定做”的测量 轮编码器。 产品的主要技术特性: 电气输出接口: TTL/RS422 , HTL/ 推挽 测量轮的形式:金属轮毂表面 橡胶“O”形圈表面 1.5 m的电缆出线方式 DKV60 产品系列的多样性 ,保证了 以下应用的可靠性: 木工机械 钢铁行业的钢板输送机械 物流输送线 分拣系统 纺织机械 印刷和造纸机械等. ■ ■ ■ ■ ■ ■ DKV60 系列测量轮型增量编码器是 用于“输送线皮带”速度及位置测 量的结构紧凑、高性价比的解决方 案。 DKV60 测量轮型增量编码器可直接 安装在“皮带轮”上,无需其它任 何的附件。 DKV60 皮带轮编码器内置了 DKS40 增量型编码器。由于采用了先进的 “迷
增量编码除了普通编码器的ABZ信号外,增量型伺服编码器还有UVW信号,国产和早期的进口伺服大都采用这样的形式,线比较多。
增量式编码器以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。
解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确性的。为此,在工控中就有每次操作先找参考点,开机找零等方法。
比如,打印机扫描仪的定位就是用的增量式编码器原理,每次开机,我们都能听到噼哩啪啦的一阵响,它在找参考零点,然后才工作。
这样的方法对有些工控项目比较麻烦,甚至不允许开机找零(开机后就要知道准确位置),于是就有了绝对编码器的出现。
绝对型旋转光电编码器,因其每一个位置绝对唯一、抗干扰、无需掉电记忆,已经越来越广泛地应用于各种工业系统中的角度、长度测量和定位控制。
绝对编码器码盘上有许多道刻线,每道刻线依次以2线、4线、8线、16线。。。。。。编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。这样的编码器是由码盘的机械位置决定的,它不受停电、干扰的影响。
绝对编码器由机械位置决定的每个位置的唯一性,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器的抗干扰特性、数据的可靠性大大提高了。
由于绝对编码器在定位方面明显地优于增量式编码器,已经越来越多地应用于伺服电机上。绝对型编码器因其高精度,输出位数较多,如仍用并行输出,其每一位输出信号必须确保连接很好,对于较复杂工况还要隔离,连接电缆芯数多,由此带来诸多不便和降低可靠性,因此,绝对编码器在多位数输出型,一般均选用串行输出或总线型输出,德国生产的绝对型编码器串行输出最常用的是SSI(同步串行输出)。
从单圈绝对式编码器到多圈绝对式编码器 旋转单圈绝对式编码器,以转动中测量光码盘各道刻线,以获取唯一的编码,当转动超过360度时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码器只能用于旋转范围360度以内的测量,称为单圈绝对式编码器。如果要测量旋转超过360度范围,就要用到多圈绝对式编码器。
编码器生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。
多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点,将某一中间位置作为起始点就可以了,而大大简化了安装调试难度。多圈式绝对编码器在长度定位方面的优势明显,欧洲新出来的伺服电机基本上都采用多圈绝对值型编码器。
由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
普通的正余弦编码器具备一对正交的sin,cos 1Vp-p信号,相当于方波信号的增量式编码器的AB正交信号,每圈会重复许许多多个信号周期,比如2048等;以及一个窄幅的对称三角波Index信号,相当于增量式编码器的Z信号,一圈一般出现一个;这种正余弦编码器实质上也是一种增量式编码器。另一种正余弦编码器除了具备上述正交的sin、cos信号外,还具备一对一圈只出现一个信号周期的相互正交的1Vp-p的正弦型C、D信号,如果以C信号为sin,则D信号为cos,通过sin、cos信号的高倍率细分技术,不仅可以使正余弦编码器获得比原始信号周期更为细密的名义检测分辨率,比如2048线的正余弦编码器经2048细分后,就可以达到每转400多万线的名义检测分辨率,当前很多欧美伺服厂家都提供这类高分辨率的伺服系统,而国内厂家尚不多见;此外带C、D信号的正余弦编码器的C、D信号经过细分后,还可以提供较高的每转绝对位置信息,比如每转2048个绝对位置,因此带C、D信号的正余弦编码器可以视作一种模拟式的单圈绝对编码器。 9 g0 n9
正余弦伺服电机编码器的优点是不用采用高频率的通讯即可让伺服驱动器获得高精度的细分,这样降低了硬件要求,同时由于有单圈角度信号,可以让伺服电机启动平稳,启动力矩大。
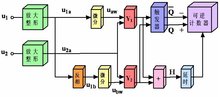
典型的增量式编码器包括一个放置在电机传动轴上的开槽的轮子和一个用于检测该轮上槽口的发射器/ 检测器模块。通常,有三个输出,分别为:A相、B相和索引(INDEX),所提供的信息可被解码,用以提供有关电机轴的运动信息,包括距离和方向。
A相(QEA)和B相(QEB)这两个通道间的关系是惟一的。如果A相超前B相,那么电机的旋转方向被认为是正向的。如果A相落后B相,那么电机的旋转方向则被认为是反向的。第三个通道称为索引脉冲,每转一圈产生一个脉冲,作为基准用来确定绝对位置。编码器产生的正交信号可以有四种各不相同的状态(01,00,10,11)。请注意,当旋转的方向改变时,这些状态的顺序与此相反(11,10,00,01)。正交解码器捕捉相位信号和索引脉冲,并将信息转换为位置脉冲的数字计数值。通常,当传动轴向某一个方向旋转时,该计数值将递增计数;而当传动轴向另一个方向旋转时,则递减计数。选择"x4"测量模式,QEI逻辑在A相和B相输入信号的上升沿和下降沿都使位置计数器计数,可以为确定编码器位置提供更高精度的数据(更多位置计数)。
正交编码器接口(QEI)模块提供了与增量式编码器的接口。QEI由对A相和B相信号进行解码的正交解码器逻辑以及用于累计计数值的递增/ 递减计数器组成。
QEI 模块包括:
· 三个输入引脚,即两个相位信号和一个索引脉冲
· 提供计数器脉冲和计数方向的正交解码器
· 16 位递增/递减位置计数器
· 计数方向状态
· X2和X4计数分辨率
· 两种位置计数器复位模式
· 通用16 位定时器/计数器模式
· 由QEI或计数器事件产生的中断
增量式编码器相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 测绘CAD
- 电子编码器
- GPRS无线电力远程抄表系统
- AUTOCAD2009工程制图从新手到高手
- 中等职业教育建筑工程施工专业规划教材:建筑施工技术
- 旋成体
- 23位绝对式光电轴角编码器
- 瑞普安华高编码器
- 计算机图形学基础教程(VisualC++版)习题解答与编程实践
- GST-BMQ-2 电子编码器
- 详解AutoCAD2014电气设计
- EVS音频编码器
- 六安市淠史杭大桥
- RS485编码器
- 公路工程施工测量现场实用程序计算技术:CASIOfx-5800P型计算机器编程技术,程序清单及fx-
- 华夏由HX-G668B
- 圆锥碎矿机工作原理、技术参数、安装调试及维护检修
- 中共XX市纪委驻市委组织部纪检组工作手册
- 中国电科院电力安全工作规程专项培训
- 影响我国公路桥梁板式橡胶支座质量的因素及应对措施
- 张力式电子围栏周界防范报警系统设计原理及应用现状
- 元江县统计局行政效能建设工作总结
- 云南省高寒山区发展被动式太阳能建筑的区域优势
- 永嘉碧桂园翡翠郡附着式升降脚手架安全专项施工方案
- 变频控制多联式空调系统
- 在全区有形建筑市场建设工作座谈会上的讲话(节选)
- 异构分布式防火墙与入侵检测联动构架的通信机制
- 引子渡水电站溢洪道弧形工作闸门焊接变形与处理
- 环境设计专业卓越工程师培养模式探析
- 医药化工学院毕业论文(设计)指导教师阶段工作小结
- 以电动葫芦为起升机构的简易强制式升降机钢丝绳检验
- 在肥东县卫生局2010年工作总结表彰大会上的讲话
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
拆边机
大山槟榔
上海地铁维护保障有限公司通号分公司
甘肃中维国际招标有限公司
舌花雏菊
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司