状态稳定性(state stability)动态系统状态对初值连续依赖的局域性质.系统的运动状态X (t)随初始条件X(to)的改变而变.若对任意给定的。}0, 总能找到}=S(s),使得当系统初始条件之差
时,系统状态之差恒限制在。范围内,即
则称该系统运动状态X(t>是稳定的;若此外还有
则称系统该状态是渐近稳定的.特别地,若X (t>是平衡态x(t)=x。时,则称此 平衡态是稳定的.2100433B
状态稳定性造价信息
状态稳定性常见问题
-
有专门做地震安全性评价的单位,地震局啥的,一般一个场地3-5万。
-
动稳定性是指系统在运行中受到大扰动后,保持各发电机在较长的动态过程中不失步,由衰减的同步振荡过程过度到动稳定状态的能力。静稳定性是飞机偏离平衡位置后的最初趋势。如果飞机趋向于返回它先前的位置就称之为静...
-
基坑的稳定性主要内容包括:基坑边坡整体稳定性、支护结构抗滑移稳定性、支护结构抗倾覆稳定性、基坑底土体抗隆起稳定性、基坑底土体抗渗流稳定性及基坑底土体抗突涌稳定性,具体工程视具体情况确定。参考资料:百度...
状态稳定性文献

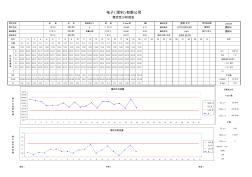 稳定性分析报告
稳定性分析报告
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 8.3 8.4 8.5 8.6 8.7 8.8 8.9 8.10 8.11 8.12 8.13 8.14 8.15 8.16 8.17 8.18 8.19 8.20 8.21 8.22 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 X1 243.82 243.85 243.80 243.77 243.75 243.87 243.82 243.83 243.80 243.79 243.85 243.72 243.78 243.82 24
 立杆稳定性计算
立杆稳定性计算
立杆的稳定性计算 : 1. 不考虑风荷载时 , 立杆的稳定性计算 其中 N —— 立杆的轴心压力设计值, N=14.35kN; —— 轴心受压立杆的稳定系数 ,由长细比 l0/i 的结果查表得到 0.26; i —— 计算立杆的截面回转半径, i=1.58cm ; l0 —— 计算长度 (m), 由公式 l0 = kuh 确定, l0=2.60m ; k —— 计算长度附加系数,取 1.155 ; 1) 对受弯构件: 不组合风荷载 上列式中 S Gk、SQk——永久荷载与可变荷载的标准值分别产生的内力和。对受弯构件内力为 弯矩、剪力,对轴心受压构件为轴力; SWk——风荷载标准值产生的内力; f——钢材强度设计值; f k——钢材强度的标准值; W——杆件的截面模量; φ——轴心压杆的稳定系数; A——杆件的截面面积; 0.9,1.2 ,1.4 ,0.85 —
电路的状态变量分析连续系统稳定性判别
上式的根在s平面上的位置决定了系统的稳定情况。只要知道它的根落在s平面的左半平面,系统就是稳定的。
电路的状态变量分析离散系统稳定性判别
如果系统稳定,则要求矩阵A的特征值
采用特征根判别系统的稳定性时,需要求解系统的特征根。如果遇到高阶方程,求解特征根的计算有一定的复杂性。对于二阶线性定常系统,可以不用求出特征根而直接判别二阶线性定常系统稳定性的充要条件。
【定理】如果一个特征多项式为
当二阶线性定常系统的两个特征根全部位于平面的单位圆中时,系统稳定的充分必要条件为:
关于状态机的一个极度确切的描述是:它是一个有向图形,由一组节点和一组相应的转移函数组成。状态机通过响应一系列事件而“运行”。每个事件都在属于“当前” 节点的转移函数的控制范围内,其中函数的范围是节点的一个子集。函数返回“下一个”(也许是同一个)节点。这些节点中至少有一个必须是终态。当到达终态, 状态机停止。
包含一组状态集(states)、一个起始状态(start state)、一组输入符号集(alphabet)、一个映射输入符号和当前状态到下一状态的转换函数(transition function)的计算模型。当输入符号串,模型随即进入起始状态。它要改变到新的状态,依赖于转换函数。在有限状态机中,会有有许多变量,例如,状态 机有很多与动作(actions)转换(Mealy机)或状态(摩尔机)关联的动作,多重起始状态,基于没有输入符号的转换,或者指定符号和状态(非定有 限状态机)的多个转换,指派给接收状态(识别者)的一个或多个状态,等等。
传统应用程序的控制流程基本是顺序的:遵循事先设定的逻辑,从头到尾地执行。很少有事件能改变标准执行流程;而且这些事件主要涉及异常情况。“命令行实用程序”是这种传统应用程序的典型例子。
另一类应用程序由外部发生的事件来驱动——换言之,事件在应用程序之外生成,无法由应用程序或程序员来控制。具体需要执行的代码取决于接收到的事件,或者它相对于其他事件的抵达时间。所以,控制流程既不能是顺序的,也不能是事先设定好的,因为它要依赖于外部事件。事件驱动的GUI应用程序是这种应用程序的典 型例子,它们由命令和选择(也就是用户造成的事件)来驱动。
Web应用程序由提交的表单和用户请求的网页来驱动,它们也可划归到上述类别。但是,GUI应用程序对于接收到的事件仍有一定程度的控制,因为这些事件要依赖于向用户显示的窗口和控件,而窗口和控件是由程序员控制的。Web应用 程序则不然,因为一旦用户采取不在预料之中的操作(比如使用浏览器的历史记录、手工输入链接以及模拟一次表单提交等等),就很容易打乱设计好的应用程序逻辑。
显然,必须采取不同的技术来处理这些情况。它能处理任何顺序的事件,并能提供有意义的响应——即使这些事件发生的顺序和预计的不同。有限状态机正是为了满足这方面的要求而设计的。
有限状态机是一种概念性机器,它能采取某种操作来响应一个外部事件。具体采取的操作不仅能取决于接收到的事件,还能取决于各个事件的相对发生顺序。之所以能 做到这一点,是因为机器能跟踪一个内部状态,它会在收到事件后进行更新。为一个事件而响应的行动不仅取决于事件本身,还取决于机器的内部状态。另外,采取 的行动还会决定并更新机器的状态。这样一来,任何逻辑都可建模成一系列事件/状态组合。
状态机可归纳为4个要素,即现态、条件、动作、次态。这样的归纳,主要是出于对状态机的内在因果关系的考虑。“现态”和“条件”是因,“动作”和“次态”是果。详解如下:
①现态:是指当前所处的状态。
②条件:又称为“事件”,当一个条件被满足,将会触发一个动作,或者执行一次状态的迁移。
③动作:条件满足后执行的动作。动作执行完毕后,可以迁移到新的状态,也可以仍旧保持原状态。动作不是必需的,当条件满足后,也可以不执行任何动作,直接迁移到新状态。
④次态:条件满足后要迁往的新状态。“次态”是相对于“现态”而言的,“次态”一旦被激活,就转变成新的“现态”了。
状态估计的数学模型是基于反映网络结构、线路参数、状态变量和实时量测之间相互关系的量测方程:
z=h(x) v
其中z是量测量;h(x)是状态变量,一般是节点电压幅值和相位角;v是量测误差;它们都是随机变量。
状态估计器的估计准则是指求解状态变量二的原则,电力系统状态估计器采用的估计准则大多是极大似然估计,即求解的状态变量二`使量测值z被观测到的可能性最大,用数学语言描述,即:
其中f(z)是量测z概率分布密度函数。
显然,具体的目标函数表达式与量测z的分布模式密切相关,对每个f(幼都有相应的极大似然估计函数。对同一系统的相同实时量测,若假定的量测分布模式不同,则得到的估计结果不完全相同,因此有不同估计准则的估计器 。2100433B
状态稳定性相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 状态识别及混沌信息处理系统的建立
- 狄家庄子倒虹吸
- 狗爪半夏
- 独具慧眼:解决建筑设计中的视觉问题
- 独塔部分斜拉桥设计实例分析
- 独头坑道通风
- 独家代理合同
- 独栋住宅
- 独栋写字楼
- 独栋商品住宅
- 独活组
- 独用面积
- 独立交会高程点
- 独立亮片装置
- 独立供电
- 独立供电系统设计与安装培训指南
- 引水隧洞工程中热应力中对围岩表层稳定性的影响分析
- 中国对美国出口的商品结构、比较优势及其稳定性分析
- 有限元强度折减法在路基边坡稳定性分析中的应用
- 状态优化的I~2C总线主控制器的FPGA设计
- 云南某二级公路牟村段滑坡稳定性分析及治理效果评价
- 基于FLAC~(3D)顺层岩质边坡开挖稳定性分析
- 华中科技大学硕士学位论文变压器在线状态监测系统
- 基于CAN总线新型LED信号机状态在线检测设计
- 基于CMMS滩坑水电站机组状态监测与分析系统设计
- 基于ABAQUS抗滑桩对膨胀土边坡稳定性影响
- 基于Bishop方法EXCEL计算边坡稳定性计算
- 基于FlAC3D强度折减法露天煤矿边坡稳定性分析
- 关于气液联动执行机构进气阀运行状态下是否关闭
- 孤山水电站不当施工诱发滑坡重大变形险情与稳定性分析
- 基于ArcGIS公路边坡稳定性评价系统设计与开发
- 合肥绕城高速公路老桥现浇段拆除施工方案及稳定性验算
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
广东国咨招标有限公司
Excel 数据处理与分析应用大全
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
拆边机
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
苏州弘创招投标代理有限公司