坐标转换计算机出处
《电子学名词》第一版。 2100433B
坐标转换计算机造价信息
1993年,经全国科学技术名词审定委员会审定发布。
坐标转换计算机出处常见问题
-
用坐标差进行计算。2667.4563-211.321=2456.1353, 3234.5723-342.211=2892.3613. ...
-
坐标系对于现场测量是没有意义的。所以,不要去转换。直接输入图中坐标数据即可。图纸上所注坐标系只是设计者的一个设计依据。
-
计算机的串口 是232标准的就是 -12v代表1 +12v代表0计算机跟计算机之间通信不需要电平转换TTL是+5v代表1 -5v代表0一般单片机是TTL电平标准的 如果跟计算机通信就需要转换一下M...
坐标转换计算机出处文献

 施工坐标转换大地坐标,大地坐标转换施工坐标
施工坐标转换大地坐标,大地坐标转换施工坐标
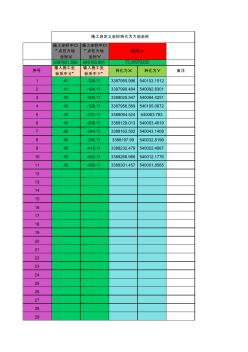
施工坐标中O ′点在大地 坐标X 施工坐标中O ′点在大地 坐标Y 3387821.509 540100.601 序号 输入施工坐 标系中X′ 输入施工坐 标系中Y′ 转化为X 转化为Y 备注 1 41 -128.11 3387955.996 540103.1512 2 41 -164.11 3387990.484 540092.8301 3 43 -200.11 3388025.547 540084.4251 4 43 -128.11 3387956.569 540105.0672 5 43 -272.11 3388094.524 540063.783 6 43 -308.11 3388129.013 540053.4619 7 43 -344.11 3388163.502 540043.1408 8 43 -380.11 3388197.99 540032.8198 9 43 -416
 GPS测量中的坐标转换
GPS测量中的坐标转换
GPS测量中坐标系变换与基准变换:同一基准面下的坐标转换,不同基准面下的坐标转换;GPS数据坐标转换实现。
《大地测量控制点坐标转换技术规范》(CH/T 2014-2016)规定了大地测量控制点坐标转换到2000国家大地坐标系的技术要求,包括重合点选取、坐标转换模型、转换方法、精度评价等。该标准为推荐性行业标准,适用于全国各省、行业部门的地方独立坐标系、1954年北京坐标系、1980西安坐标系、WGS-84坐标系以及ITRF框架下的大地测量控制点向2000国家大地坐标系的坐标转换。
一部计算机表现出某种智能行为并不一定被认为它本身有智能。为了判定计算机是否具有智能,图灵曾设计了一种测试方法,即有名的图灵试验。设想一个测试者用计算机终端分别与被测的人及计算机联系(测试者不能直接看到被测人与计算机),如果从回答测试者问题的信息中不能正确区分被测者是人还是计算机,即把计算机当成人了,就应认为计算机具有智能。这是一种关于智能机的行为主义的观点。以回答问题的能力做为具有智能的判据有一定局限性,因为人的智能涉及许多方面,有些智能如形象思维就不可以言传。这种测试也难以反映自学习自适应能力。人们一方面追求用机器实现智能,另一方面又不大相信电子器件的自动开与关能实现人的思维。因此当一种实现智能应用的方法很有效时,往往认为这是一种已知的技术,与其他计算机程序运行没什么不同,人们对于机器模拟人类思维的矛盾心理趋向于认为一个能工作的系统是有用的但不是真正有智能的。
实际上,智能计算机已经成为一个动态的发展的概念,它始终处于不断向前推进的计算机技术的前沿。人工智能的权威学者M.明斯基定义人工智能的任务是研究还没有解决的计算机问题。这一观点反映了人工智能与智能机研究有别于其他学科的显著特点。智能应用问题往往没有确定的求解算法而采用搜索的办法,一旦人们对某一问题掌握了足够丰富的知识,即已找到了不需要搜索的确定型算法,可以预见其行为与效果时,这个问题一般就不再认为是一个智能问题了。从应用的角度看,如果一项人工智能的研究成果已经成熟并被广泛采用,人们已经了解它的运行机制,就不再把它视为智能技术了。可以预言,目前被看成是智能计算机主要组成部分的知识库在不久的将来就会像数据库一样被当成一般的计算机技术。因此,智能计算机与其看成是与传统计算机完全不同的一种机器,还不如看成是带动计算机不断发展的一项高技术。这种压力迫使从事智能计算机研究的科研人员必须不断提出新概念、新方法,不断攻克新的技术难关。
研制智能计算机的目的不是用计算机代替人的脑力劳动,而是充分发挥人和计算机各自的特长,形成互补、协调的人机合作环境。不怎么聪明的智能计算机可以使聪明的人更加聪明。在人机合作的和谐环境中,人主要负责提供涉及面很广的常识和从事有创造性的工作,机器作为人的助手从事需要一定智能的其他工作。智能机往往是某些方面聪明过人而其他方面又十分愚笨,因此设计一个高效率高智商的人机协作智能系统必须合理地确定哪些事由人做,哪些事由机器做,而且要建立十分友好的人机对话界面。
光计算机 与传统硅芯片计算机不同,光计算机用光束代替电子进行计算和存储:它以不同波长的光代表不同的数据,以大量的透镜、棱镜和反射镜将数据从一个芯片传送到另一个芯片。 研制光计算机的设想早在20世纪50年代后期就已提出。1986年,贝尔实验室的戴维.米勒研制成功小型光开关,为同实验室的艾伦.黄研制光处理器提供了必要的元件。1990年1月,黄的实验室开始用光计算机工作。 光计算机有全光学型和光电混合型。上述贝尔实验室的光计算机就采用了混合型结构。相比之下,全光学型计算机可以达到更高的运算速度。研制光计算机,需要开发出可用一条光束控制另一条光束变化的光学“晶体管”。现有的光学“晶体管”庞大而笨拙,若用它们造成台式计算机将有辆汽车那么大。因此,要想短期内使光学计算机实用化还很困难。
坐标转换计算机相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 坑内滑坡
- 坑口电站工程
- 坑探工程地质编录
- 坑探工程
- 坑距
- 坑道供水、通风自控器研制报告
- 坑道断面
- 坑道施工机械
- 坑道爆破
- 坑道碎部测量
- 坑道突水
- 坑道钻探法
- 坑道钻探
- 坑道
- 块体共振试验
- 块体金属玻璃基复合材料细观本构模型研究
- 云计算技术在计算机数据处理中的应用分析与发展对策
- 张河湾公司计算机监控系统国产化改造可行性
- 有粘结预应力技术在高层建筑转换梁结构施工中的应用
- 智能PLC在水电站计算机监控系统中应用的发展趋势
- 在公路互通式立交设计中用解析法编程计算楔形端坐标
- 工程量清单造价体系在对外合作项目中转换与有机结合
- 基于LTMW计算机网络技术专业教学模式与实践
- 工程制图与计算机辅助设计
- 广东公路建设项目财政支出绩效评价计算机管理信息系统
- 关于铁路曲线桥梁墩台支座垫石中心坐标计算方法
- 基于ArcEngineCAD/GIS数据转换系统
- 关于高职计算机网络技术专业数学课程教学思考与实践
- 基于LonWorks总线遥测双向垂线坐标仪设计
- 基于Delphi计算机与密集柜之间串口通信设计
- 基于ArcInfoCAD数据到GIS数据转换
- 可编程计算机控制器(PCC)在电梯远程监控中应用
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
拆边机
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
甘肃中维国际招标有限公司
舌花雏菊
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司