tcs牵引力控制系统作用模式

tcs牵引力控制系统作用模式
TCS与ABS作用模式十分相似,两者都使用感测器及刹车调节器。当TCS感应到车轮打滑的时候,首先会经过引擎控制电脑改变引擎点火的时间,减低引擎扭力输出或是在该轮上施加刹车以防该轮打滑,如果在打滑很严重的情况下,就再控制引擎供油系统。TCS在运用的时候,变速箱会维持较高的挡位,在油门加重的时候,会避免突然下挡以免打滑的更厉害。TCS最大的特点是使用现有ABS系统的电脑、输速感知器和控制引擎与变速箱电脑,即使换上了备胎,TCS也可以准确的应用。
tcs牵引力控制系统造价信息

tcs牵引力控制系统性能
TCS不但可以提高汽车行驶稳定性,而且能够提高加速性,提高爬坡能力。原来只是豪华轿车上才安装TCS,现在许多普通轿车上也有。TCS如果和ABS相互配合使用,将进一步增强汽车的安全性能。TCS和ABS可共用车轴上的轮速传感器,并与行车电脑连接,不断监视各轮转速,当在低速发现打滑时,TCS会立刻通知ABS动作来减低此车轮的打滑。若在高速发现打滑时,TCS立即向行车电脑发出指令,指挥发动机降速或变速器降挡,使打滑车轮不再打滑,防止车辆失控甩尾。

tcs牵引力控制系统简介
TCS就是针对此问题而设计的。 TCS依靠电子传感器探测到从动轮速 度低于驱动轮时(这是打滑的特征),就会发出一个信号,调节点火时间、减小气门开度、减小油门、降挡或制动车轮,从而使车轮不再打滑。
tcs牵引力控制系统作用模式常见问题
-
DCS控制系统(DIstributed Control System,分散控制系统)是随着现代大型工业生产自动化的不断兴起和过程控制要求的日益复杂应运而生的综合控制系统。它是计算机技术、系统控制技术、...
-
就是化工厂采用DCS控制系统来控制和监视整个装置的生产工艺参数,可以节省人力,提高控制的质量和安全系数。DCS,也称集散控制系统;是集中控制,分散危险的意思。整个控制系统将现场的仪表信号(温度、压力、...
-
产品质量、软硬件优缺点、设计方案优缺点、成本、工程服务和售后服务。

tcs牵引力控制系统工作原理
最近采用牵引力控制系统的汽车越来越多。牵引力控制系统(Traction Control System,简称TCS)的作用是使汽车在各种行驶状况下都能获得最佳的牵引力。汽车在行驶时,加速需要驱动力,转弯需要侧向力。这两个力都来源于轮胎对地面的摩擦力,但轮胎对地面的摩擦力有一个最大值。在摩擦系数很小的光滑路面上,汽车的驱动力和侧向力都很小。如果为了获得较大的驱动力,一个劲儿地踏紧油门踏板,使驱动力超过了轮胎和地面之间的最大摩擦力即附着力,这样不但不能获得所期望的驱动力,反而影响了汽车的行驶稳定性。汽车在转弯时,如果节气阀开度过大,将使驱动轮打滑。那么这时汽车的转向性会出现什么变化呢?前轮驱动汽车的前轮如果打滑,汽车将出现转向不足的现象,即汽车偏离了转向圆弧,跑到转向圆弧之外去了。后轮驱动汽车的后轮如果打滑,汽车将出现过度转向现象,即汽车偏离了转向圆弧,跑到转向圆弧之内去了,严重时汽车会产生旋转。所以在冰雪路面上,为了防止汽车驱动轮打滑,必须小心翼翼地控制油门。牵引力控制系统的作用是,在汽车加速时自动地控制驱动力,以便使轮胎的滑动量处于合理的范围之内,从而保持汽车行驶的稳定性。这和防抱死制动系统的作用大同小异,防抱死制动系统的作用是防止轮胎抱死,提高汽车制动时的行驶稳定性。
牵引力控制系统的控制装置是一台计算机。利用计算机检测4个车轮的速度和转向盘转向角,当汽车加速时,如果检测到驱动轮和非驱动轮转速差过大,计算机立即判断驱动力过大,发出指令信号减少发动机的供油量,降低驱动力,从而减小驱动轮轮胎的滑转率。计算机通过转向盘转角传感器掌握司机的转向意图,然后利用左右车轮速度传感器检测左右车轮速度差;从而判断汽车转向程度是否和司机的转向意图一样。如果检测出汽车转向不足(或过度转向),计算机立即判断驱动轮的驱动力过大,发出指令降低驱动力,以便实现司机的转向意图汽车停止时,4个车轮的速度都是零。在汽车起步时,也即从零车速加速时,牵引力控制系统检测驱动轮的滑转率,如果检测到较大的滑转率时,发出指令降低发动机的功率,减小轮胎的滑转率,在汽车起步时,完全不让轮胎打滑是不行的,但轮胎的滑转率过大,将加速轮胎的磨损,降低轮胎和地面的摩擦力,对起步加速没有一点好处。当轮胎的滑转率适中时,汽车能获得最大的驱动力。转弯时如果使轮胎产生较大的滑转,将使汽车的加速能力变好。该系统可以利用转向盘转角传感器检测汽车的行驶状态,判断汽车是直线行驶还是转弯,并适当地改变各轮胎的滑转率。但是牵引力控制系统也有缺点。当司机利用油门开度,调整汽车行驶状态时,该系统妨碍司机的驾驶意图。例如后轮驱动汽车转弯时,为了减小转弯半径,技术熟练的司机往往加大油门使汽车加速,利用后驱动轮打滑产生的过转向现象,调整汽车转向中的状态。但由于牵引力控制系统的作用,后驱动轮不能打滑。这样就妨碍了司机的驾驶意图,使汽车在较大的转弯圆弧上转向。此外有的人过分相信牵引力控制系统,认为该系统能保证汽车按司机的意图转向。随便地以超高车速进入弯道,结果不是出现转向不足就是转向过度。牵引力控制系统和防抱死制动系统一样,其作用是有限的,过分的依赖这些控制系统是十分有害的。
tcs牵引力控制系统作用模式文献

 电频车牵引力计算
电频车牵引力计算
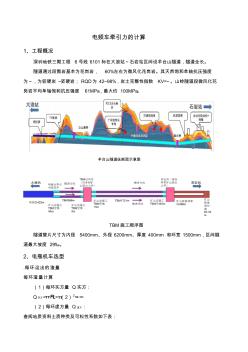
电频车牵引力的计算 1、工程概况 深圳地铁三期工程 6号线 6101标在大浪站~石岩站区间设羊台山隧道,隧道全长。 隧道通过段围岩基本为花岗岩, 60%左右为微风化花岗岩。其天然饱和单轴抗压强度 为~,为较硬岩 ~坚硬岩; RQD为 42~98%,岩土完整性指数 KV=~。山岭隧道段微风化花 岗岩平均单轴饱和抗压强度 61MPa,最大约 100MPa。 羊台山隧道纵断面示意图 TBM施工顺序图 隧道管片尺寸为内径 5400mm、外径 6200mm、厚度 400mm 和环宽 1500mm,区间隧 道最大坡度 29‰。 2、电瓶机车选型 .每环运出的渣量 每环渣量计算 (1)每环实方量 Q实方: Q 实方=πR2L=π(2)2×= (2)每环虚方量 Q 虚方: 查阅地质资料土质种类及可松性系数如下表: 土的分类 土的特性 可松性系数 KS 八类土 坚实的细粒花岗岩,花岗片麻岩, 闪长岩 — 根
 (整理)电缆牵引力.
(整理)电缆牵引力.
精品文档 精品文档 8.3 电缆敷设 8.3.1 施工准备 8.3.1.1. 技术准备 (1) 电缆的牵引计算 1)电缆的牵引力计算式,见表 8.3.1.1-1 2)摩擦系数 牵引计算式中的摩擦系数,在没有实测数据时,可参照表表 8.3.1.1-2 所列数据。 3)电缆盘轴孔摩擦力和牵引钢丝绳重量 通常电缆都绕在电缆盘上,在牵引电缆时,还需克服电缆盘轴孔的摩擦力在孔和轴配合 较好的情况下,摩擦力可折算成相当于 15m 长的电缆重量。 估算总的牵引力时,还须计入钢丝的重量,通常可折算成相当于 5m 的电缆的重量, 4)侧压力计算公式 侧压力 P=T/R 式中 P-侧压力 (N/m); T-牵引力 (N) ; R-弯曲半径 (m)。 5)电缆受力允许值 电缆最大允许牵引力原则上按电缆受力材料抗张强度的 1/4 计算,该强度乘以材料的 断面积为最大压力。在以下各种材料时,单芯电缆相应的最大牵

牵引力控制系统作用
牵引力控制系统,又称循迹控制系统。汽车在光滑路面制动时,车轮会打滑,甚至使方向失控。同样,汽车在起步或急加速时,驱动轮也有可能打滑,在冰雪等光滑路面上还会使方向失控而出危险。牵引力控制系统就是针对此问题而设计的。
牵引力控制系统依靠电子传感器探测到从动轮速度低于驱动轮 时(这是打滑的特征),就会发出一个信号,调节点火时间、减小气门开度、减小油门、降挡或制动车轮,从而使车轮不再打滑。
牵引力控制系统不但可以提高汽车行驶稳定性,而且能够提高加速性,提高爬坡能力。原采只是豪华轿车上才安装牵引力控制系统,2008--2013许多普通轿车上也有。
牵引力控制系统如果和ABS相互配合使用,将进一步增强汽车的安全性能。牵引力控制系统和ABS可共用车轴上的轮速传感器,并与行车电脑连接,不断监视各轮转速,当在低速发现打滑时,牵引力控制系统会立刻通知ABS动作来减低此车轮的打滑。若在高速发现打滑时,牵引力控制系统立即向行车电脑发出指令,指挥发动机降速或变速器降挡,使打滑车轮不再打滑,防止车辆失控甩尾。
牵引力控制系统利用计算机检测4个车轮的速度和转向盘转向角,当汽车加速时,如果检测到驱动轮和非驱动轮转速差过大,计算机立即判断驱动力过大,发出指令信号减少发动机的供油量,降低驱动力,从而减小驱动轮轮胎的滑转率。计算机通过转向盘转角传感器掌握司机的转向意图,然后利用左右车轮速度传感器检测左右车轮速度差;从而判断汽车转向程度是否和司机的转向意图一样。如果检测出汽车转向不足(或过度转向),计算机立即判断驱动轮的驱动力过大,发出指令降低驱动力,以便实现司机的转向意图。
各个厂家的牵引力控制系统功能都一样,只不过叫法不同而已。例如:奔驰叫ASR,丰田叫TRC,宝马叫DTC,凯迪拉克叫TCS等。
ASR,其全称是Acceleration Slip Regulation,即牵引力控制系统或驱动防滑系统,其目的就是要防止车辆尤其是大马力车子,在起步、加速时驱动轮打滑现象,以维持车辆行驶方向的稳定性。
ASR可以通过减少节气门开度来降低发动机功率或者由制动器控制车轮打滑来达到对汽车牵引力的控制。装有ASR的车上,从油门踏板到汽油机节气门(柴油机喷油泵操纵杆)之间的机械连接被电控油门装置所代替,当传感器将油门踏板的位置及轮速信号传送至控制单元时,控制单元就会产生控制电压信号,伺服电机依此信号重新调整节气门的位置(或者柴油机操纵杆的位置),然后将该位置信号反馈至控制单元,以便及时调整制动器。
当汽车行驶在易滑的路面上时,没有ASR的汽车加速时驱动轮容易打滑,如果是后驱动轮打滑,车辆容易甩尾,如果是前驱动打滑,车辆方向容易失控。有ASR时,汽车在加速时就不会有或能够减轻这种现象。在转弯时,如果发生驱动轮打滑会导致整个车辆向一侧偏移,当有ASR时就会使车辆沿着正确的路线转向。
总之,ASR可以最大限度利用发动机的驱动力矩,保证车辆起动、加速和转向过程中的稳定性。
ASR与ABS的区别在于,ABS是防止车轮在制动时被抱死而产生侧滑,而ASR则是防止汽车在加速时因驱动轮打滑而产生的侧滑,ASR是在ABS的基础上的扩充,两者相辅相成。
ASR只安装在一些高档车上面,但是因为ASR与ABS包含着性能及技术上的贯通,所以有望近几年ASR变得与ABS一样普及。
目前,牵引力控制系统主要由制动力矩控制和发动机转矩控制两种控制方式。
制动力矩控制方式
对将要空转的驱动轮施加制动力,把发动机输出的多余转矩在制动器上消耗掉,控制车轮的滑转率在期望的范围内,其方法类似ABS。
制动控制方式比发动机控制方式响应速度快,能有效地防止汽车起步时或者从高附着路面突然跃变到低附着路面时车轮的空转。制动控制方式还能对每个驱动轮进行独立控制,与差速器锁止装置具有同样的功能。
但这种控制方式要把发动机多输出的功率以热的形式在制动器上消耗掉,因而制动器发热严重,影响它的使用寿命,不利于提高汽车的经济性
发动机转矩控制方式
控制发动机输入到驱动轮上的转矩,使车轮的滑转率控制在合适的范围内。
发动机控制方式则是根据路面状况输入给驱动轮最佳的驱动力矩,具体方法有改变燃料喷射量、点火时间和节气门开度。上述两种方法既可以单独使用,也可以组合起来综合使用 。
而采用发动机转矩控制,除了响应速度比制动方式较慢以外,另一个本质问题是在非对称附着系数路面不能实现最佳驱动控制,其效能和ABS控制系统低选的情形相似,为了实现驱动力最佳控制,即最大限度地提高汽车的经济性、动力性、方向稳定性及可操纵性,目前正在朝着发动机转矩、车轮制动两者综合控制的方向发展。
tcs牵引力控制系统相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 万国建筑群
- 公路GPS控制测量
- 自动巡航系统
- 光机电一体化技术应用100例
- 免棱镜全站仪
- 光电显示薄膜
- x-by-wire
- SH-AWD
- TRC
- 面板灯导光板
- 板面清洁机
- 洗牌机
- tr100
- 静电除尘机
- 双面胶冲型
- USAS-12
- 正压送风对降低污水厂设备腐蚀的作用与实践(论文)
- 引入PPP模式的高标准农田建设及财政支持体系创新
- 应用型人才培养模式下高校机电工程综合实践改革探索
- 中国房地产投资信托基金(REITs)发展模式探索
- 在大荷载作用下人工挖孔灌注桩桩基承台的设计与施工
- 环境设计专业卓越工程师培养模式探析
- 基于局部二进制模式的带钢表面缺陷初级检测方法
- 园林植物在城市景观设计中的作用
- 在面内压力作用下点腐蚀低碳钢板的非线性有限元分析
- 制冷和空调设备运行与维修专业教学模式的创新与实践
- 在耐热铬铝合金改性处理中钒渣的冶金物化条件及作用
- 基于GIS与羊城通的高速公路行驶车辆监管模式
- 智慧城市建设运维的SOP和PPP模式
- 执业资格体系下土木工程专业应用型人才培养模式
- 应用型人才培养模式下结构力学教学方法与探索
- 中国石化大型乙烯项目管理模式座谈会
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
拆边机
大山槟榔
上海地铁维护保障有限公司通号分公司
甘肃中维国际招标有限公司
舌花雏菊
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司