水下微型视频机器人
水下微型视频机器人基本信息
| 中文名 | 水下微型视频机器人 | 分辨率 | 460 TV LINES |
|---|---|---|---|
| 显 示 | LCD液晶显示屏 | 显示器型号 | Color, FCB-IX10A Sony |
加拿大 seamor marine 有限公司主要销售seamor水下监测器,seamor水下监测器是公司2006年在原seamor ROV上的改进产品,最大潜水深度达300米,机重仅16千克,可用于水下视频检测观测,推进器、可变焦距摄像机、综合传感器及电子控制箱各模块独立组合,便携可靠,目前该公司已拥有众多客户
产品信息:
seamor ROV主要功能及配置如下:
主要功能: 探索搜救\海洋探测\海岸工程\管道检测\港口监测\海关报警海上救援\油库油轮监测\船体监测\水力发电监测\潜水安全控制\水下安全控制\水下系统控制\考古探测\水下建筑检测
主要配置:
1. 潜水深度: 300 米;
2. 机身尺寸:35.53cm×35.5cm ×47.2cm ;
3.最低照明度:2 lux
4. 重量:机器人16kg;
5. 构成:铝及高压塑料
6 灯光:2×50w
7. 焦距:人工及自动均可
8. 速度:3节(5.56千米/小时)
9. 控制系统:最大负荷750W
10. 光度:2×50w,光强可调2100433B
水下微型视频机器人造价信息
水下微型视频机器人常见问题
-
水下机器人电缆,德汝电缆厂家订制水下机器人电缆,新订进口PUR材料作为一款新型水下机器人电缆材料,使用方便、环保。线缆柔性、耐磨、耐油、耐酸碱、抗拉、抗老化……作为各类潜水电机连接线,广泛应用到潜水泵...
-
水下机器人电缆有vv电缆、海洋电缆、防海水电缆、yjv 新兴电缆等不同的类型。也有不同的品牌、型号也有不同的价格。 比如Floating Cable水下...
-
种类很多按照用途主要可以分为:工业机器人、农业机器人、家用机器人、医用机器人、服务型机器人、空间机器人、 水下机器人、机器人、 排险救灾机器人、 教育教学机器人、娱乐机器人等按照功能可以分为:操作机器...
水下微型视频机器人文献

 水下机器人压载释放装置的设计
水下机器人压载释放装置的设计
介绍了压载释放装置的工作原理及用途,分析了应急抛载成功的关键因素,提出了压载释放装置的设计方法。针对实际使用中发现的问题,对压载释放装置的设计进行了优化。
水下机器人压载释放装置的设计
介绍了压载释放装置的工作原理及用途,分析了应急抛载成功的关键因素,提出了压载释放装置的设计方法。针对实际使用中发现的问题,对压载释放装置的设计进行了优化。
|

|
|

|
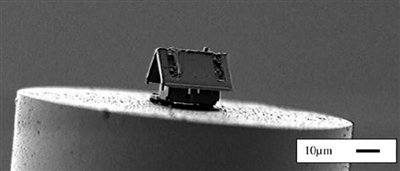
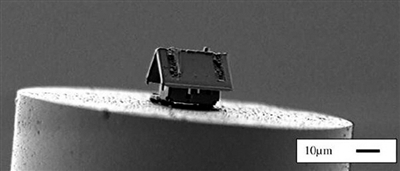
法国Femto-ST研究所的研究人员使用微型机器人组装出了一个“世界上最小的房子”。这座房子仅高0.015毫米,占地面积约为0.02毫米×0.01毫米,比普通的两层房子小50万倍。
显然,这座房子需要在放大镜下才能看得清。它如今坐落在一根光纤的顶部,有一个传统的人字形屋顶、四个窗户、一个门,还有烟囱和墙壁。房子的制作材料为0.0012毫米厚的超薄二氧化硅膜,所有搭建的工作是由纳米机器人来完成的。
虽然这座房子只能容纳一些微生物,但是这家研究所的所有人都在为这项纳米机器人结构技术的突破而欢呼。一位工程师说:“我们在光纤上建造微型住宅,这表明我们能够以高精度实现这些光纤上的微系统组件的安装。”这正是这所房子的意义所在:“我们第一次能够以不到两纳米(0.002微米)的精度来实现图形化和装配,这对机器人和光学领域来说是一个非常重要的突破。”(浩源)
作者:浩源
日前,长江航道救助打捞局水下检测中心在长江荆江河段开展了新型水下机器人设备试验,为水下检测新方法作出了有益的探索。这意味着,未来水下机器人可能更广泛地应用于水下打捞。
“ROV的优点是水面操作人员可实时观察到水下环境并遥控操作,对机器智能要求不高,缺点是由于电缆连接,其活动范围有限;AUV的优点是由于没有电缆连接,其活动范围较大,不受母船制约,不足是对机器智能要求较高,目前仅限于简单的水下探测作业。”林扬指出,目前发展了ROV和AUV混合型水下机器人,其活动范围较ROV大大增加,且操作者可以通过光纤实时监测和操控水下机器人,因此也称之为半自主水下机器人。
中科院沈阳自动化研究所海洋技术装备研究室主任李硕告诉记者,2014年7月份,深海滑翔机在南海完成了区域覆盖观测试验性应用,这是我国自主研制的滑翔机首次完成该项试验性应用。
中科院光电技术研究所高级工程师冯常则介绍了一种工作于特种环境条件下的水下机器人。目前,该所研发的水下机器人主要应用于核电站停堆大修期间关键设施设备的监测及维护。
水下机器人不仅需要“视力好”,能够进行高速、高精度光学自动定位,还需要耐腐蚀、动作灵活,而这些条件,离不开关键部件的制造。
李硕表示,与发达国家相比,我国在一些关键部件和关键材料的研究方面还有很大差距,要实现水下机器人的产业化,重点在于市场的开拓和基础材料、重要组部件、各种高精度探测设备和传感器的研究开发。
林扬指出,虽然我国的总体技术和研发能力已达到或接近国际先进水平,但在一些关键部件和某些材料的研究方面还有很大差距。冯常也认为,材料是特种机器人的核心技术之一。
林扬说:“与其他机器人相比,目前AUV的情景感知、导航定位、自主控制等智能水平还相对较低,仅限于完成水下探测、目标搜寻等简单、重复的任务。此外,由于与海水介质的接触,低密度、高强度的材料以及密封、防腐等也是水下机器人特有的技术,且随着深度的增加,其难度也越来越大。”
“水下机器人的发展与材料、能源、传感器、控制、通信、人工智能等密切相关。”李硕认为,要实现水下机器人向更深、更远、功能更强的目标发展,关键技术的研究必须先行。
水下微型视频机器人相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 水下悬浮隧道
- 水下悬浮隧道在地震作用下的动力分析方法及破坏机理
- 水下悬浮隧道稳定性的试验研究
- 水下成层含砂层的盾构隧道地基地震响应与液化
- 水下抢修设备
- 水下挤密砂桩技术及其在外海人工岛工程中的应用
- 水下摄影测量
- 水下施工涂料
- 水下桥隧技术
- 水下深层水泥搅拌法加固土地基技术规程
- 水下清淤机
- 水下湿式焊接与切割
- 水下焊接作业要求
- 水下焊接规范
- 水下爆炸冲击载荷等效加载实验设备的研制
- 水下爆破作业对水生生物资源及生态环境损害评估方法
- 中国信达施工现场智能化管理及视频监控系统设计方案
- 中华人民共和国水上水下施工作业通航安全审核申请书
- 能跨越水平窗框障碍的玻璃幕墙清洗机器人的设计
- 智能建筑视频安防监控系统分项检验批质量验收记录表
- 在中国地质调查局加强项目经费管理视频会议上的讲话
- 智能化交通管理与视频监控系统工程投标初步设计说明
- 工程基础知识水下混凝土灌注施工钢筋笼上浮防治措施
- 工业电视视频监控安全可持续电源系统改造技术
- 基于TMS320F28335视频跟踪主控制器设计
- 基于DirectX音频视频无线传输系统设计与实现
- 关于白车身装焊夹具设计及点焊机器人焊接仿真分析
- 基于Web远程视频监控系统在自动化中设计与应用
- 关于全市开展完善网吧视频监控系统建设通知
- 工业中用于辅助消防报警数字视频监控系统设计与实现
- 基于TMS320DM6446视频会议终端硬件设计
- 基于i.MX27嵌入式3G视频服务器设计与实现
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
拆边机
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司