速度环运算
速度环运算是伺服电机运动控制的一环。运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。速度环的输入就是位置调节后的输出以及位置设定的前馈值,速度环输入值和速度环反馈值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出到电流环。速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。速度环控制包含了速度环和电流环 。
速度环运算基本信息
| 中文名 | 速度环运算 | 属 性 | 伺服电机运动控制的一环 |
|---|---|---|---|
| 领 域 | 数控技术 | ||
根据对于实际系统的分析,为了使系统性能达到规定的技术指标,在设计速度环时应当考虑以下要求。
(1)速度环串联校正装置应当包含一个积分环节,以克服伺服电机死区和功率放大器漂移造成的静态误差,保证静态精度指标,提高系统静态刚度。
(2)把速度环闭环特性设计成过阻尼的,使它的主极点成为一对实极点。这样有利于克服干摩擦影响,改善伺服系统低速运行特性。另外,前馈补偿装置(它的传递函数等于速度环闭环传递函数的倒数)可以用一对简单的比例加微分环节实现,以利于展宽系统频带。
(3)互相联接的各元、部件之间信号电平相匹配 。2100433B
速度环运算造价信息
速度模式是指通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PD控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度 。
速度环运算常见问题
-
1.速度环:对流场中某时刻的封闭曲线L作线积分,即为沿该闭合曲线的速度环量。速度环量是标量,有正负号,规定沿曲线逆时针绕行的方向为正方向,沿曲线顺时针绕行的方向为负方向。速度环量是旋涡强度的量度,通常...
-
1.若﹣2amb4与5an+2b2m+n可以合并成一项,求mn的值____________ 2.已知实数a,b,c满足a2+b2=1,b2+c2=2,c2+a2=2,求ab+bc+ca的最小值____...
-
有效数字运算规则 由于与误差传递有关,计算时加减法和乘除法的运算规则不太相同。1.加减法先按小数点后位数最少的数据保留其它各数的位数,再进行加减计算,计算结果也使小数点后保留相同的位数。2.乘除法先按...
速度环运算文献

 运算放大器16个基本运算电路
运算放大器16个基本运算电路
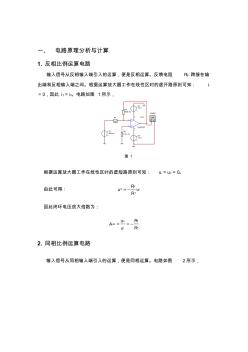
一、 电路原理分析与计算 1. 反相比例运算电路 输入信号从反相输入端引入的运算,便是反相运算。反馈电阻 RF 跨接在输 出端和反相输入端之间。根据运算放大器工作在线性区时的虚开路原则可知: i- =0,因此 i1= i f。电路如图 1所示, R1 10kΩ V1 500mV U1A TL082CD 3 2 4 8 1 R2 9.1k Ω RF 100kΩ V2 12 V V3 12 V XMM1 图 1 根据运算放大器工作在线性区时的虚短路原则可知: u-=u+=0。 由此可得: 0 1 f i R u u R 因此闭环电压放大倍数为: 1 o f uo i u R A u R 2. 同相比例运算电路 输入信号从同相输入端引入的运算,便是同相运算。电路如图 2所示, U1A TL082CD 3 2 4 8 1 R2 10kΩ RF 10kΩ V2 12 V V3 12 V X
 第2章MATLAB数据及其运算
第2章MATLAB数据及其运算
第2章MATLAB数据及其运算
速度环运算是伺服电机运动控制的一环。速度环的输入就是位置调节后的输出以及位置设定的前馈值,速度环输入值和速度环反馈值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出到电流环。速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。速度环控制包含了速度环和电流环 。
在电脑数据通信中计算数据传输速率常使用公式:时钟频率×数据总线宽度÷8=Bytes/s。在电脑系统中,CPU与系统内存、显示接口(如AGP“总线”)以及通过主板芯片组与扩展总线(ISA、PCI)之间进行数据交换时,是按相应的时钟频率进行的。例如当系统时钟为66MHz时,系统内存与CPU之间的数据传输率是528MB/s,AGP高速显示接口工作在X1方式的时钟频率也是66MHz,但由于数据宽度只有32位,所以AGP接口的数据传输速率只能达到266MB/s 。PCI总线的数据宽度虽然也是32位,但由于PCI总线时钟频率只有33MHz,所以PCI总线的数据传输最高速率只有133MB/s。在Intel公司推出440BX主板芯片将系统时钟频率由原来的66MHz提高到100MHz后,CPU与系统内存之间的数据交换速率就达到了800MB/s(100×64÷8)。从这点可以看出,在同样的数据宽度条件下,只要提高工作时钟频率就能提高传输通道的数据传输速率。
另外,提高CPU的主频对提高CPU运算速度也是非常有效的措施。举例说吧,假设某型CPU能在1个时钟周期(即图1中的一个周期)执行一条运算指令,那么当CPU运行在100MHz主频时将比它运行在50MHz主频时速度快一倍。因为100MHz的时钟周期比50MHz的时钟周期占用时间减少了一半,也就是工作在100MHz主频的CPU执行一条运算指令所需时间仅为10ns比工作在50MHz主频时的20ns缩短了一半,自然运算速度也就快了一倍。只不过电脑的整体运行速度不仅取决于CPU运算速度,还与其它各分系统的运行情况有关,所以在人们不断设法提高CPU工作主频的同时,还在努力试图提高电脑的系统时钟频率,这些努力的最终目的是想提高电脑的总体运行速度,因为只有当电脑中的CPU运算速度、各分系统运行速度和各分系统之间的数据传输速度都能得到提高后,电脑整体的运行速度才能真正得到提高。
动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。任何模式都必须使用电流环,电流环是控制的根本,在系统进行速度和位置控制的同时系统也在进行电流/转矩的控制以达到对速度和位置的相应控制。
速度环运算相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 速度线
- 速生杨
- 速生柳
- 速腾100冰淇淋机
- 速霸XL105印刷机
- 造书手作书设计制作指南(全彩)
- 造价之星
- 《造型设计基础》
- 造桥机
- 造梦师80001
- 造粒机组
- 造粒生产线
- 造纸厂下脚料烘干机
- 造纸机
- 造纸机械切纸机
- 造纸机械配件
- 亿阳信通中标环城高速公路晋江至石狮段机电工程项目
- 中国民宿消费市场格局分析及十三五发展环境分析报告
- 正果水厂建设工程之护坡工程项目环评报告
- 以污泥、建筑垃圾为基料制备高强轻质发泡环保陶瓷板
- 中国水环境污染治理社会化资金投入现状、问题与对策
- 园林景观工程在推进城乡宜居环境建设中的问题及思考
- 中国移动广东公司环形混凝土电杆技术规范书(暂行)
- 基于闭环反馈优化的IDC基础设施造价评估模型
- 一体化载体循环生物处理设备处理生活污水的中试
- 在水泥企业节能环保适用技术交流会上的讲话(摘要)
- 依七高速公路施工期环境保护与水土保持管理方案
- 整体提升脚手架和环链电动葫芦在高层建筑施工中应用
- 张家塬镇农村环境综合整治项目实施方案(以奖代补)
- 余杭区质检环保检测大楼干挂石材幕墙施工方案
- 中国气象局第7号令气象探测环境和设施保护办法
- 我国房地产市场的发展环境
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
拆边机
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
电梯平层准确度
建设部关于开展城市规划动态监测工作的通知
广州利好来电气有限公司
四川中泽盛世招标代理有限公司