斯密特触发器功能说明
斯密特触发器功能说明
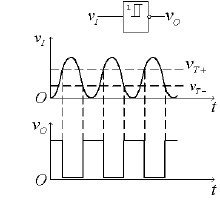
它是一种阈值开关电路,具有突变输入--输出特性的门电路。这种电路被设计成阻止输入电压出现微小变化(低于某一阈值)而引起的输出电压的改变。 当输入电压由低向高增加,到达V+时,输出电 压发生突变,而输入电压Vi由高变低,到达V-时,输出电压发生突变,因而出现输出电压变化滞后的现象,可以看出对于要求一定延迟启动的电路,它是特别适用的。
而从IC内部的逻辑符号和"与非"门的逻辑符号相比就略有不同,它增加了一个类似方框的图形,该图形正是代表斯密特触发器一个重要的滞后特性。滞后特性是指当把输入端并接成非门时,它们的输入、输出特性是:当输入电压V1上升到VT+电平时,触发器翻转,输出负跳变;过了一段时间输入电压回降到VT+电平时,输出并不回到初始状态而需输入V1继续下降到VT-电平时,输出才翻转至高电平(正跳变),用公式:VT+-VT-=△VT 表示,△VT称为斯密特触发器的滞后电压。△VT与IC的电源电压有关,当电源电压提高时,△VT略有增加,一般△VT值在3V左右。因斯密特触发器具有电压的滞后特性,常用它对脉冲波形整形,使波形的上升沿或下降沿变得陡直;有时还用它作电压幅度鉴别,在数字电路中它也是很常用的器件。
斯密特触发器造价信息
斯密特触发器具有如下两个特点:
1、电路具有两个阈值电压,分别称为正向阈值电压和负向阈值电压;
2、与双稳态触发器和单稳态触发器不同,斯密特触发器属于"电平触发型"电路,不依赖于边沿陡峭的脉冲。
斯密特触发器功能说明常见问题
-
施密特触发器:电位触发方式,可以控制触发电位。它也有两个稳定状态,但与一般触发器不同的是,施密特触发器采用电位触发方式,其状态由输入信号电位维持;对于负向递减和正向递增两种不同变化方向的输入信号,施密...
-
1. 波形变换可将三角波、正弦波、周期性波等变成矩形波。2. 脉冲波的整形数字系统中,矩形脉冲在传输中经常发生波形畸变,出现上升沿和下降沿不理想的情况,可用施密特触发器整形后,获得较理想的矩形脉冲。3...
斯密特触发器功能说明文献

 基于斯密特触发器的简易数字相位计设计
基于斯密特触发器的简易数字相位计设计
基于斯密特触发器精确波形变换特性实现对两路输入信号的波形转换与校正,利用STC5410单片机计算输出,设计一款简易数字相位计,完成对两路信号相位差的测量,具有测量精度高,成本低,外围电路简单等优点.
光控长延时LED路灯控制器的研究与设计斯密特触发器
针对城市道路照明LED改造中半功率节电应用的特点,提出了一种基于光控和长延时开关的LED路灯控制方案,利用光敏电阻、555时基电路和CD4060二进制计数器实现了控制电路的设计;实验结果表明:本方案简单可行,实用可靠。

霍尔传感器分类

霍尔传感器分为线型霍尔传感器和开关型霍尔传感器两种。
(一)开关型霍尔传感器由稳压器、霍尔元件、差分放大器,斯密特触发器和输出级组成,它输出数字量。开关型霍尔传感器还有一种特殊的形式,称为锁键型霍尔传感器。
(二)线性型霍尔传感器由霍尔元件、线性放大器和射极跟随器组成,它输出模拟量。
线性霍尔传感器又可分为开环式和闭环式。闭环式霍尔传感器又称零磁通霍尔传感器。线性霍尔传感器主要用于交直流电流和电压测量。
霍尔传感器开关型
如图4所示,其中Bnp为工作点“开”的磁感应强度,BRP为释放点“关”的磁感应强度。当外加的磁感应强度超过动作点Bnp时,传感器输出低电平,当磁感应强度降到动作点Bnp以下时,传感器输出电平不变,一直要降到释放点BRP时,传感器才由低电平跃变为高电平。Bnp与BRP之间的滞后使开关动作更为可靠。
霍尔传感器锁键型
如图5所示,当磁感应强度超过动作点Bnp时,传感器输出由高电平跃变为低电平,而在外磁场撤消后,其输出状态保持不变(即锁存状态),必须施加反向磁感应强度达到BRP时,才能使电平产生变化。
霍尔传感器线性型
输出电压与外加磁场强度呈线性关系,如图3所示,可见,在B1~B2的磁感应强度范围内有较好的线性度,磁感应强度超出此范围时则呈现饱和状态。
开环式电流传感器
由于通电螺线管内部存在磁场,其大小与导线中的电流成正比,故可以利用霍尔传感器测量出磁场,从而确定导线中电流的大小。利用这一原理可以设计制成霍尔电流传感器。其优点是不与被测电路发生电接触,不影响被测电路,不消耗被测电源的功率,特别适合于大电流传感。
霍尔电流传感器工作原理如图6所示,标准圆环铁芯有一个缺口,将霍尔传感器插入缺口中,圆环上绕有线圈,当电流通过线圈时产生磁场,则霍尔传感器有信号输出。
闭环式电流传感器
磁平衡式电流传感器也叫霍尔闭环电流传感器,也称补偿式传感器,即主回路被测电流Ip在聚磁环处所产生的磁场通过一个次级线圈,电流所产生的磁场进行补偿, 从而使霍尔器件处于检测零磁通的工作状态。
磁平衡式电流传感器的具体工作过程为:当主回路有一电流通过时,在导线上产生的磁场被聚磁环聚集并感应到霍尔器件上, 所产生的信号输出用于驱动相应的功率管并使其导通,从而获得一个补偿电流Is。 这一电流再通过多匝绕组产生磁场 ,该磁场与被测电流产生的磁场正好相反,因而补偿了原来的磁场, 使霍尔器件的输出逐渐减小。当与Ip与匝数相乘 所产生的磁场相等时,Is不再增加,这时的霍尔器件起指示零磁通的作用 ,此时可以通过Is来平衡。被测电流的任何变化都会破坏这一平衡。 一旦磁场失去平衡,霍尔器件就有信号输出。经功率放大后,立即就有相应的电流流过次级绕组以对失衡的磁场进行补偿。从磁场失衡到再次平衡,所需的时间理论上不到1μs,这是一个动态平衡的过程。
斯密特触发器相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 电平触发器
- 昔阳迎灯
- D触发器
- 各类触发器相互转换
- 电子触发器
- 时钟触发器
- JK触发器
- R-S触发器
- 单稳态触发器
- T触发器
- 火种灯
- 三相闭环触发器
- 触发器件
- 永诺闪光灯无线触发器CTR-301P
- 旧青洲灯塔
- 城外诚二手家具市场
- 智能磨音频谱分析仪(DF-6811A)使用说明书
- 张潘明污水处理厂初步设计说明书(水质工程学课程)
- 中国水电建设股份公司中标沙特吉达公路地下通道工程
- 原材料密度级配碎石水稳层混凝土及沥青砼配合比
- 源理电气干粉砂浆筒仓称重仪表YLC01A3说明书
- 整套施工方案-超高支模对专家论证意见修改情况说明
- 通风预埋管道的防护密闭专项工程质量验收记录表
- 中国建设银行凭证机打软件V2.0(内部使用说明)
- 多功能快速连接法兰CN209743850U
- 新型的土工织物试验仪器DJS多功能剪力仪
- 在光(电)缆接头盒内设置密封监测装置的可行性建议
- 应用水泥土挤密桩加固既有提速铁路路基基床施工技术
- 以体育功能转换为目标的旧工业建筑改造设计策略
- 中国铝业连城分公司完成CBS仓储管理功能模块构建
- 振冲法地基加固单元工程施工质量验收评定表填表说明
- 以太网POE交换机供电网口温湿度传感器使用说明书
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
广东国咨招标有限公司
Excel 数据处理与分析应用大全
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
拆边机
大山槟榔
上海地铁维护保障有限公司通号分公司
甘肃中维国际招标有限公司
舌花雏菊
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
苏州弘创招投标代理有限公司