四探头雷达
四探头雷达全称叫"倒车防撞雷达",也就是四个探头的"倒车防撞雷达"也叫"泊车辅助装置",是汽车泊车或者倒车时的安全辅助装置,由超声波传感器(俗称探头)、控制器和显示器(或蜂鸣器)等部分组成。

四探头雷达基本信息
| 中文名称 | 四探头雷达 | 全称 | 倒车防撞雷达 |
|---|---|---|---|
| 组成部分 | 探头、控制器和显示器 | 作用 | 扫除视野死角和视线模糊的缺陷 |
能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高驾驶的安全性。
四探头雷达造价信息
四探头雷达常见问题
-
雷达所起的作用和眼睛相似,当然,它不再是大自然的杰作,同时,它的信息载体是无线电波。 事实上,不论是可见光或是无线电波,在本质上是同一种东西,都是电磁波,传播的速度都是光速C,差别在于它们各自占据的波...
-
雷达及其分类雷达(Radar,即 radio detecting and ranging),意为无线电搜索和测距。它是运用各种无线电定位方法,探测、识别各种目标,测定目标坐标和其它情报的装置。在现代军...
-
这个没有特定子目,可以补充清单及定额。
四探头雷达文献

 (整理)四线制倒车雷达探头电气原理图.
(整理)四线制倒车雷达探头电气原理图.
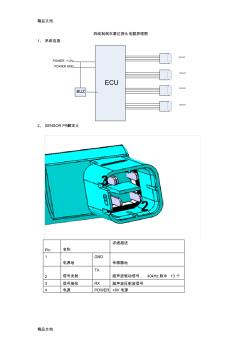
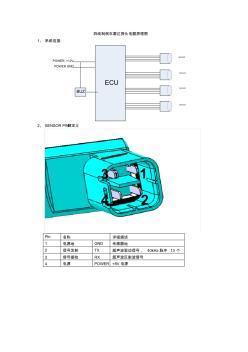
精品文档 精品文档 四线制倒车雷达探头电器原理图 1、 系统连接 ECU POWER +12V POWER GND SENSOR SENSOR SENSOR SENSOR BUZ 2、 SENSOR PIN脚定义 Pin 名称 详细描述 1 电源地 GND 传感器地 2 信号发射 TX 超声波驱动信号, 40kHz脉冲 13 个 3 信号接收 RX 超声波反射波信号 4 电源 POWER +8V电源 2 3 精品文档 精品文档 3、 信号时序 40kHz 13个 余振 障碍物反射信号 TX RX 8V 8V 控制器 TX 信号脚发射 +8v 40kHz的方波脉冲 13个用于驱动 SENSOR产生超声波。超声 波经过障碍物反射后反射波被 SENSOR接收。 SEMSOR接收反射信号后经过放大滤波及 整形 变成如上图 RX信号的图像。其中余振大约 1.2ms,由于障碍物不同和距离的
 四线制倒车雷达探头电气原理图
四线制倒车雷达探头电气原理图
四线制倒车雷达探头电器原理图 1、 系统连接 ECU POWER +12V POWER GND SENSOR SENSOR SENSOR SENSOR BUZ 2、 SENSOR PIN脚定义 Pin 名称 详细描述 1 电源地 GND 传感器地 2 信号发射 TX 超声波驱动信号, 40kHz脉冲 13 个 3 信号接收 RX 超声波反射波信号 4 电源 POWER +8V电源 1 2 3 4 3、 信号时序 40kHz 13个 余振 障碍物反射信号 TX RX 8V 8V 控制器 TX 信号脚发射 +8v 40kHz的方波脉冲 13个用于驱动 SENSOR产生超声波。超声 波经过障碍物反射后反射波被 SENSOR接收。 SEMSOR接收反射信号后经过放大滤波及 整形 变成如上图 RX信号的图像。其中余振大约 1.2ms,由于障碍物不同和距离的原因 是障碍物反射信号强弱不同。
四探头雷达相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 有源差分探头
- 超声波测厚
- 转炉副枪探头
- 安居宝无线红外探头
- 双瓣翠菊
- 氧杂环丁烷-3-亚甲基乙酸乙酯
- 固定式气体监测探头
- 氧气检测探头
- 双探头漏氯报警器
- 阳离子染料接枝印花
- 钛酸(四)乙酯
- 磁场智能探头GSP100
- 高温氧探头
- 八月菊
- TP-LINK TL-WR845N
- 电涡流位移传感器
- 在听取四川省“三江”水电综合考察情况汇报时邹家华
- 中国建筑装饰协会七届四次常务理事会
- 中国电器工业协会电焊机分会四届八次理事会会议纪要
- 云南四建建筑施工现场安全标准化管理手册第一,二章
- 中国机电兵船工业档案学会第四届理事会领导成员名单
- 中国工程建设标准化协会第五届第四次常务理事会
- 在中国机械工业联合会四届三次会员大会上的总结讲话
- 引嫩扩建骨干一期工程乌北四标段施工存在问题及对策
- 中国电器工业协会第三届理事会第四次会议
- 四层结构模型的变电站综合自动化系统设计与实现
- 关于印发云南省探矿权采矿权管理办法等四个文件通知
- 感应电动机四开关低成本逆变器磁链轨迹改进控制
- 关于社会单位消防安全四个能力设工作开展情况汇报
- 基于四种模式电力科技创新人才培养方式
- 基于四个基本建筑工程计量与计价课程改革探索
- 巩固江西省造林绿化一大四小工程面临问题与对策
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
广东国咨招标有限公司
Excel 数据处理与分析应用大全
拆边机
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
电梯平层准确度
建设部关于开展城市规划动态监测工作的通知
广州利好来电气有限公司
苏州弘创招投标代理有限公司