SEW-SANTASALO减速器
SEW-SANTASALO减速器是一个主要用于造纸、冶金、矿山、运输、水泥、建筑、化工、纺织、轻工、能源、起重等行业的机械传动中的大中型减速器。
SEW-SANTASALO减速器是一个主要用于造纸、冶金、矿山、运输、水泥、建筑、化工、纺织、轻工、能源、起重等行业的机械传动中的大中型减速器。
具体型号:
1C80N~500N型单级斜齿轮减速器、 2C140N~400N型两级斜齿轮减速器、3C140N~400N型三级斜齿轮减速器、2KC125N~400N型两级锥齿轮—斜齿轮减速器、3KC140N~400N型三级锥齿轮—斜齿轮减速器、2PC125N~400N型两级斜齿轮减速器、3PC125N~400N型三级斜齿轮减速器、 4PC160N~400N型四级斜齿轮减速器、2TKC90M~400M型两级锥齿轮—斜齿轮减速器、2TKC250M~400M型、3TKC140N~400N型三级锥齿轮—斜齿轮减速器
SEW-SANTASALO减速器造价信息
SEW-SANTASALO减速器常见问题
-
一、行星减速机是一种工业产品,行星减速机是一种传达机构,其结构由一个内齿环紧密结合於齿箱壳体上,环齿中心有一个自外部动力所驱动之太阳齿轮,介於两者之间有一组由三颗齿轮等分组合於托盘上之行星齿轮组,该组...
-
RV减速器原理:减速机一般用于低转速大扭矩的传动设备,把电动机、内燃机或其它高速运转的动力通过减速机的输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的,普通的减速机也会有几对相同原理齿轮达到...
-
机器人减速器一般用谐波减速器与RV减速器(即摆线针轮减速器),目前最好的还是径差子减速器(它是汽车差速器演变而来的)。谐波减速器工艺性差,包括日本在内改良还不断;RV减速器工艺成熟,其多曲轴等工艺难度...
SEW-SANTASALO减速器文献

 减速器
减速器
. '. 减速器 一、概念 减速机在原动机和工作机或执行机构之间起匹配转速和传递转矩的作用, 减速机是一种 相对精密的机械, 使用它的目的是降低转速, 增加转矩。 按照传动级数不同可分为单级和多 级减速机; 按照齿轮形状可分为圆柱齿轮减速机、 圆锥齿轮减速机和圆锥-圆柱齿引轮减速 机;按照传动的布置形式又可分为展开式、 分流式和同进轴式减速机。 减速器是一种由封闭 在刚性壳体内的齿轮传动、蜗杆传动、齿轮 -蜗杆传动所组成的独立部件,常用作原动件与 工作机之间的减速传动装置。 在原动机和工作机或执行机构之间起匹配转速和传递转矩的作 用,在现代机械中应用极为广泛。 二、原理 减速机一般用于低转速大扭矩的传动设备, 把电动机、 内燃机或其它高速运转的动力通 过减速机的输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的, 普通的减速 机也会有几对相同原理齿轮达到理想的减速效果,大小齿轮
 减速器论文
减速器论文
1 减速器 张艺博 河南科技大学 机械制造及自动化 河南洛阳 471000 摘要 :20 世纪 70-80年代,世界上减速器技术有了很大的发展,且与新技术 革命的发展紧密结合。减速器是各类机械设备中广泛应用的传动装置。减速器 设计的优劣直接影响机械设备的传动性能。本文通过对减速器的发展及优化设 计方法的分析,提出了减速器设计中应考虑的约束条件、目标函数和变量等。 关键词:减速器的发展、优化设计 减速器是原动机和工作机之间的独立的闭式传动装置,是一种相对精密的机 械,使用它的目的是用来降低转速和增大转矩,以满足工作需要,在某些场合 也用来增速,称为增速器。 减速器主要由传动零件 (齿轮或蜗杆 )、轴、轴承、箱体及其附件所组成。其 基本结构有三大部分: 1. 齿轮、轴及轴承组合。 2. 箱体:箱体是减速器的重要组成部件。它是传动零件的基座,应具有足够 的强度和刚度。箱体通常用灰铸铁
减速器是一种应用极为广泛的传动装置。国内外减速器种类繁多,但从理论上分析,常用减速器可归结为两大类型:一是基于啮合传动原理的直齿圆柱齿轮减速器、斜齿圆柱齿轮减速器、圆锥齿轮减速器、行星齿轮减速器、蜗杆减速器、摆线针轮减速器及谐波传动减速器等等;另一类是基于液压传动原理的液压马达。它们都在随着科学技术的高速发展而不断改进和完善。然而,在如何更大限度地满足减速比大、重量轻、结构紧凑、效率高、体积小、成本低、噪声小、寿命长,以及机械性能稳定等等综合指标要求方面都存在着不同程度的差距 。
作为工业机器人核心零部件的精密减速器,与通用减速器相比,机器人用减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。
大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器。
1、RV减速器和谐波减速器的原理和优劣势
RV减速器:
用于转矩大的机器人腿部腰部和肘部三个关节,负载大的工业机器人,一二三轴都是用RV。相比谐波减速机,RV减速机的关键在于加工工艺和装配工艺。RV减速机具有更高的疲劳强度、刚度和寿命,不像谐波传动那样随着使用时间增长,运动精度会显著降低,其缺点是重量重,外形尺寸较大。
▲RV-E型减速器▲
谐波减速器:
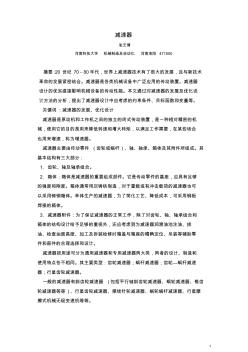
用于负载小的工业机器人或大型机器人末端几个轴,谐波减速器是谐波传动装置的一种,谐波传动装置包括谐波加速器和谐波减速器。谐波减速器主要包括:刚轮、柔轮、轴承和波发生器三者,四者缺一不可。其中,刚轮的齿数略大于柔轮的齿数。谐波减速机用于小型机器人特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。
▲谐波减速器▲
两者都是少齿差啮合,不同的是谐波里的一种关键齿轮是柔性的,它需要反复的高速变形,所以它比较脆弱,承载力和寿命都有限。RV通常是用摆线针轮,谐波以前都是用渐开线齿形,现在有部分厂家使用了双圆弧齿形,这种齿形比渐开线先进很多。
减速器的两巨头是Nabtesco和Hamonica Drive,他们几乎垄断了全球的机器人用减速器。这两种减速器都是微米级的加工精度,光这一条在量产阶段可靠性高就很难了,更别说几千转的高速运转,而且还要高寿命。
谐波减速器由“柔轮、波发生器、刚轮、轴承”这四个基本部件构成。
柔轮的外径略小于刚轮的内径,通常柔轮比刚轮少2个齿。波发生器的椭圆型形状决定了柔轮和刚轮的齿接触点分布在介于椭圆中心的两个对立面。波发生器转动的过程中,柔轮和刚轮齿接触部分开始啮合。波发生器每正时针旋转180°,柔轮就相当于刚轮逆时针旋转1个齿数差。在180°对称的两处,全部齿数的30%以上同时啮合,这也造就了其高转矩传送。
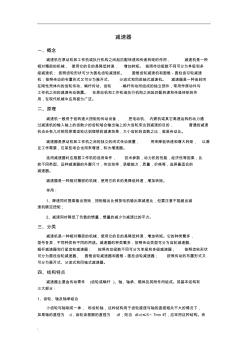
相比谐波减速器,RV传动是新兴起的一种传动,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,还具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
RV减速器是由摆线针轮和行星支架组成,以其体积小、抗冲击力强、扭矩大、定位精度高、振动小、减速比大等诸多优点被广泛应用于工业机器人、机床、医疗检测设备、卫星接收系统等领域。
RV减速器的壳体和摆线针轮是通过实体的钢来发生传动的,因此承载能力强。而谐波减速器的柔轮可不断发生变形来传递扭矩,这一点决定了谐波减速器承受大扭矩和冲击载荷的能力有限,因此一般运用在前端。

2、RV减速器和谐波减速器两者的优劣势
谐波减速器结构简单紧凑,适合于小型化、低、中载荷的应用。
RV减速器刚性好、抗冲击能力强、传动平稳、精度高,适合中、重载荷的应用,但RV减速器需要传递很大的扭矩,承受很大的过载冲击,保证预期的工作寿命,因而在设计上使用了相对复杂的过定位结构,制造工艺和成本控制难度较大。RV减速器内部没有弹性形变的受力元件,所以能够承受一定扭矩。RV减速器的轴承是其薄弱环节,受力时很容易突破轴承受力极限而导致轴承异常磨损或破裂。在高速运转时这个问题更突出,所以RV减速机的额定扭矩随输入转速下降非常明显。
3、减速器之间是否存在取代关系
正方观点:
RV减速器较机器人中常用的谐波传动具有高得多的疲劳强度、刚度和寿命,而且回差精度稳定,不像谐波传动那样随着使用时间增长运动精度就会显著降低。所以许多国家的高精度机器人传动多采用RV减速器,因此,RV减速器在先进机器人传动中有逐渐取代谐波减速器的发展趋势。
这些产品在某些型号上确实存在替代关系,但这几类减速器只能实现部分替代。绝大部分情况下,各类减速器很难实现替换,比如在速比方面,谐波和RV的速比都要远远大于行星,所以小速比领域是行星的天下。当然行星的速比是可以做大的,但是很难去替换谐波和RV。又比如刚性方面,行星和RV的刚性要好于谐波,在体现刚性的使用工况下,谐波很难有好的表现。
谐波减速器的特点是轻和小,在这方面,行星和RV却很难做到。所以各类减速器只能在一部分情况下可实现替换,但是如果一种产品全方位替换另一种产品是不现实的。
反方观点:
各类减速器之间不能相互取代,而是一种互补的关系。
RV和谐波这两种传动有互补性,但也不排除结构设计优化和制造工艺突破后,在中低载荷应用领域形成局部竞争。
减速器箱体是安装各传动轴的基础部件;由于减速器工作时各轴传递转矩时要产生比较大的反作用力,并作用在箱体上,因此要求箱体具有足够的刚度,以确保各传动轴的相对位置精度。采用金属结构箱体能获得较大的强度和刚度,且结构紧凑,重量较轻 减速器箱体结构形式繁多,在小批量制造时,采用焊接减速器箱体较为合理。
焊接减速器箱体一般制成剖分式结构,即把一个箱体分成上下两个部分,分别加工制造;然后在剖分面处通过螺栓将两个半箱体连成一个整体。
SEW-SANTASALO减速器相关推荐
- 相关百科
- 相关知识
- 相关专栏
- SEW-工业减速机(天津)有限公司
- SEW同轴式减速电机
- SEW-传动设备(武汉)有限公司
- 昆明春程消防器材有限公司
- 安徽省皖中消防设备有限公司
- 河北子时通讯器材有限公司
- 二氧化硫测定器
- SPG屏蔽管道泵
- SPG离心泵
- 永嘉宁江流体设备有限公司
- 上海凯斯特民防设备有限公司
- 北京远方动力可再生能源科技发展有限公司
- 郑彤ZTH-ST-ST单模双芯光纤
- 光纤通信连接器
- 宜兴市维良塑业有限公司
- 石家庄沃斯特环保科技有限公司
- 工程建设机械驱动桥主减速器BP神经网络辅助优化设计
- 基于Pro/E三环减速器外齿轮及内齿板精确建模
- 广州大学机械设计一级齿轮减速器设计书(2600)
- 机械设计基础课程设计一级圆柱齿轮减速器设计说明书
- 哈工大机械设计课程设计蜗杆减速器设计说明书
- 机械设计课程设计单级圆柱齿轮减速器设计说明书
- 减速器装配图CAD
- labview的微型减速器机械性能测试系统的设计
- pro/E的减速器机械设计辅助教学软件的设计
- 机械设计课程设计说明书二级展开式圆柱斜齿轮减速器
- 哈工大机械设计最后课程设计单级蜗杆减速器设计说明书
- 机械设计课程设计说明书二级斜齿圆柱齿轮减速器设计
- 机械设计课程设计带皮二级展开式斜齿圆柱齿轮减速器
- 机械设计课程设计展开式二级减速器标准直齿轮说明书
- 机械基础课程设计(一级圆柱齿轮减速器)
- 上海电机学院机械设计课程设计说明书单级蜗杆减速器
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
广东国咨招标有限公司
Excel 数据处理与分析应用大全
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
拆边机
大山槟榔
上海地铁维护保障有限公司通号分公司
甘肃中维国际招标有限公司
舌花雏菊
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
苏州弘创招投标代理有限公司