流动空间重塑下的东亚集装箱港口航运网络研究
《流动空间重塑下的东亚集装箱港口航运网络研究》是依托华东师范大学,由王列辉担任项目负责人的面上项目。
流动空间重塑下的东亚集装箱港口航运网络研究基本信息
| 中文名 | 流动空间重塑下的东亚集装箱港口航运网络研究 | 项目类别 | 面上项目 |
|---|---|---|---|
| 项目负责人 | 王列辉 | 依托单位 | 华东师范大学 |
以《中国航务周刊》的船期表和劳合社航线数据为主干资料,以关系的视角替代等级的视角,应用港口地理学、城市地理学等的理论和网络分析、深度访谈等方法,研究“流动空间”的重塑下集装箱港口航运网络结构、空间效应及演变机制。 航运网络结构。基于劳合社1890-2008年的航线数据,运用复杂网络的分析工具和相关指标,研究了中国的全球航运连接能力。北美、欧洲和东亚是中国最主要的海向腹地,总体的趋势是1950年代之前北美是中国最重要的海向腹地,之后欧洲取而代之,1980年代之后东亚地区是中国最主要的海向腹地。中国北方港口在80年代主要依靠日本的港口,90年代对釜山等韩国港口的依存度上升,南方港口前期主要依靠香港中转,但近年来香港的中转地位下降。基于《中国航务周刊》1995-2015年的船期表,考察了中国与21世纪海上丝绸之路沿线港口之间的航运网络演变过程和特点,国际航线分布呈现集中化趋势和距离衰减特征;网络层级结构明显,由一主一副的双中心(香港港、上海港)向四中心(上海港、宁波港、深圳港、香港港)发展;航运网络经历了发育阶段、等级化阶段、网络化阶段的发展演化,受全球化、运输技术变革、地缘政治-经济演变等因素的影响。 航运网络空间效应。研究航运网络演变与港口发展之间的关系。近代上海港的崛起很重要的是上海港纳入到东亚航运网络中,成为香港-上海-日本港口这一三角网络中的重要节点;以往研究港口群内部港口竞争更多地关注陆向腹地的竞争,实际上海向腹地对港口发展至关重要。以上海港和宁波港为研究对象,考察相邻两港的航运网络演变与港口竞争之间的联系。 航运网络演变机制。以马士基和地中海这两大船公司为中心,研究不同船公司航运网络对中国沿海港口城市航运可达性的影响;以英国和日本两国对航运企业扶持策略的不同,研究20世纪20年代这两个国家的航运企业在中国不同的航运网络结构;以海峡两岸集装箱港口体系为研究对象,考察两岸航运政策对航运网络的影响。
流动空间重塑下的东亚集装箱港口航运网络研究造价信息
以1996-2012年的东亚为空间范围,以《中国航务周刊》的船期表为主干资料,辅之以英国劳氏海上情报分部(LMIU)等网站的数据,应用港口地理学、城市地理学等的理论和社会网络分析、深度访谈等方法,考察集装箱港口航运网络结构、空间效应及演变机制。以关系的视角替代结构的视角,重构网络分析范式,研究流动空间(space of flows)的重塑下,航运网络的点(港口)、线(航线)、面(网络)的空间特征变化;考察网络演变的空间效应,特别是对不同类型港口的影响;进而从金融危机、两岸直航、枢纽港策略等经济与制度角度分析网络演变的机制;最后与国外典型航运网络比较,提炼出航运网络一般空间结构模式和影响机制。本项目不仅能深化港口地理学研究,也能为当下出海大通道规划、航运中心建设等提供参考;同时对社会网络分析方法及UCINET和GEPHI软件在航运网络中的应用进行探讨,弥补传统研究方法的不足。
流动空间重塑下的东亚集装箱港口航运网络研究常见问题
-
1.韩进(HANJIN)是韩国的船公司,公司自己的集装箱一般为蓝色,租用其他租箱公司的箱子颜色就各异了。 2.地中海(MSC)是全球船公司老二,仅此于MAERSK,公司总部在瑞士,应该他们的箱子外表颜...
-
铁路集装箱 海运集装箱集装箱海上运输展示集装箱装卸展示集装箱货柜
-
想发展铁路集装箱港口,至少需要两个条件,一是有铁路线,二是有深水港口。集装箱码头必须满足下列基本要求:⑴具备设计船型所需的泊位、岸线及前沿水深和足够的水域,保证船舶安全靠离。⑵具备码头前沿所需要的宽度...
流动空间重塑下的东亚集装箱港口航运网络研究文献

 航运联盟改变行业格局,集装箱港口运营风险增加
航运联盟改变行业格局,集装箱港口运营风险增加
集装箱港口运营商在联盟缩减其客户基础的时候投资装卸大型船舶所需设备,这使他们被迫面临前所未有的风险。那些与承运人没有关系的独立码头运营商所面临的挑战更大,因为他们可能会和拥有或属于另一个码头运营商的客户竞争。
基于集装箱港口的空箱调运流程优化
以集装箱空箱调运成本最低为优化目标,在分析现行集装箱空箱周转流程的基础上,提出一种新的空箱调运流程,进而建立了集装箱空箱调度解析模型。设计了基于免疫遗传算法的优化解法,并基于实际调查及预测的数据进行仿真对比实验。以青岛港为对象进行的实证研究表明,所提出的空箱调运方案很大程度上减少了空箱调运成本,而且有助于缓解港口交通拥挤,显示了新流程及其调度方法的有效性。
本文系“港口圈”杯论文大赛三等奖作品
作者单位丨上港集团九江港务有限公司

近年来,中国多个沿海港口正规划建设自动化集装箱码头。争先抢占国内自动化集装箱码头技术和管理的制高点。在借鉴西方发达国家港口自动化集装箱码头建设经验的基础上,我国码头的自动化规划和建设、设备的设计和选型等方面取得了卓有成效的成果。但在自动化码头业务管理和流程,尤其是堆场系统设计方面还存在一大块空白有待填补。本文从分析传统集装箱码头堆场系统的局限性出发,提出有关自动化集装箱码头堆场系统管理和流程的变革,为中国沿海各港口即将建成的自动化集装箱码头的管理提供参考依据。
一、传统集装箱码头堆场系统的局限性
中国沿海各港口基本上采用轮胎吊搭配堆高机(铲车)的传统集装箱码头堆场系统,该系统具有场地利用率高、成本低、设备操作简单灵活、对集装箱的损坏少等优点。随着集装箱运输业的发展,传统集装箱码头堆场系统得以持续优化和改进,逐渐形成一套行之有效的管理流程和规则,加之近年来对数学模型和仿真科技的应用,使得传统集装箱码头堆场系统的效率优势进一步体现。然而,随着自动化集装箱码头的兴起,传统集装箱码头堆场系统的局限性逐步凸显。
1、系统的输入和输出无法预知性
传统集装箱码头堆场系统无法预知出口集装箱进场情况,导致随机进场的出口集装箱全凭人工经验安排堆场计划。另外,传统集装箱码头堆场计划受后续船舶配积载的制约,难以适应船舶配积载要求的变化。例如,开工作业路数、出口集装箱在船上的具体贝位等都无法在安排堆场计划前预知。进口集装箱的情况亦然:虽然在作业前已知进口船图等部分信息,但无法在安排进口集装箱卸船堆场计划前预知后续的中转二程船或客户提箱等信息。
2、多种制约和冲突并存
传统的堆场计划经常陷入一种“平衡陷阱”。出口集装箱堆场过于分散则会牵涉过多机械,造成机械资源浪费;过于集中则造成作业路间的冲突。最好是能够根据船舶实际开路数来分配出口箱区,但是上述两个不确定性而无法预知船舶开路和积配载情况,只能大致凭经验或者历史数据估计达到一种平衡。在同一箱区内,比如同一港口、吨级基本上集中放置,但是指令的先后次序也将形成箱与箱之间的制约,另一箱区存在两条路甚至更多作业路同样会形成制约。这种制约主要来自于传统集装箱堆场的轮胎吊收发箱工艺,传统堆场工艺理想的操作是收、发箱时都能够集中在一个箱位上,待一个箱位的所有箱子都收发完毕再行车到旁边箱位收、发。减少轮胎吊收发箱来回行车而造成的成本浪费和效率降低。理想状态往往是无法达到的,冲突和制约无法避免。传统堆场还面临着一个问题,虽然目前集装箱卡车都安装有无线终端(外集卡通过道口小票信息)可以知晓自己的取箱和收箱位置,但是集装箱卡车长度大于箱位,当不同作业路或者不同箱位的指令卡车在同一个箱区相邻作业时,往往需要彼此交流协调,存在协调的“成本”。
总之,指令相互制约,箱区间、箱箱间制约,进箱与装船的冲突,提箱与卸船的冲突都将影响传统集装箱堆场的作业。
3、传统堆场工艺的弊端决定效益和效率的矛盾
由于上述冲突、制约等原因,轮胎吊不可避免要来回行车收、发箱,并且存在集卡等待成本,普遍翻箱率很高,进口卸船时按照分票堆放或者根据二程船堆放较难实现。因为如果进口分票的量较大,并且进口无法做到同票同时卸船,那么势必要多个箱位堆放,轮胎吊就会多次反复来回行大车,将会严重影响进口的效率和成本。有人会认为整个操作过程效率和成本是永恒的,进口卸船慢了,提箱或者二程船转船会快。这种想法其实进入一个误区,因为上文提到的输出的无法预知,所以进口卸船虽根据二程船进行分堆,但是由于二程船出口开路和配积载的无法预知,仍然造成轮胎吊来回行车发箱的情况。出口更不必说,传统堆场工艺的弊端决定了效率和效益的矛盾。
4、堆场计划规则复杂以致没有统一标准
在长期的实践中,人们对传统的堆场计划制订了各种规则。比如分船分港分吨、按位堆放原则、按排堆放原则、重压轻堆放原则等。这些规则的应用至今没有统一的标准,往往根据堆场计划员的经验,加之上述系统两端的不确定性造成无法判断堆场计划的好坏,所以规则的标准化难以衡量和统一。
二、自动化堆场计划的变革
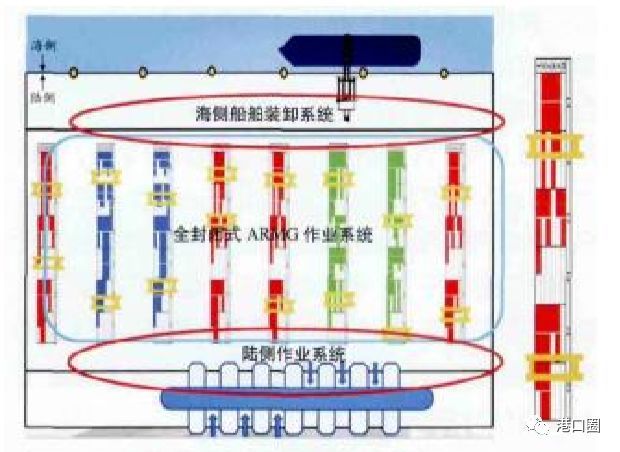
自动化堆场国内外普遍采取自动化轨道式龙门起重机(ARMG)作业工艺,每条箱区采用双机配置(如下图所示)。海侧轨道吊通过AGV与岸桥对接形成自动化码头海侧船舶装卸系统,陆侧轨道吊直接对接外集卡形成自动化码头陆侧作业系统,中间自动化轨道式龙门起重机作业的堆场区域形成了一个全封闭式的作业区间。
1、全封闭的自动化轨道式龙门起重机作业系统的特点
从自动化码头的全封闭作业和双机配置的特性可以看出其特点如下:
(1)收、取箱点固定。传统集装箱码头堆场的收、取箱点随着轮胎吊作业箱位的不同而变化,由集卡行驶到指令所在箱位取箱。而全封闭的自动化堆场收、取箱点固定在箱区的两端。
(2)双机配置形成“缓冲﹠接力”作业模式。前后场的集装箱绝大多数情况下需要进行“缓冲﹠接力”,比如进口卸船,海侧 ARMG 从 AGV 收进的进口箱一般需要陆侧的ARMG接力运输至靠近陆侧的堆存区域。因为外集卡提箱作业是由陆侧ARMG负责,所以必须由海侧ARMG放置在特定的缓冲区域,再由陆侧ARMG接力发给外集卡。
(3)全封闭性双机作业的特点。自动化堆场的全封闭性解决了水平运输机械在箱区内、箱箱间的冲突,双机缓冲作业的设计则避免了收、发两种作业方式冲突的问题。
2、自动化码头堆场特点的改变带来堆场计划的变革
收、取箱点的改变使得每一个装卸箱指令变为相互独立的事件。传统集装箱堆场收、取箱下一个指令受到前一个指令的制约,前一个指令的箱位是下一个指令的开始位置,因为轮胎吊与集卡的交接点随作业指令而不断变化。而自动化集装箱码头收、取箱点固定在箱区两端,因此每个指令不受前一个指令的影响成为一个独立的事件,那么每个指令所用的时间和成本都是恒定的。传统集装箱堆场之所以将同类型的集装箱在箱区内相对集中,主要是为了使相邻指令尽可能堆放在一起,避免轮胎吊行车而造成成本浪费和效率降低。自动化集装箱码头的每个作业指令是相互独立的事件,那么也就无需要遵守传统装卸的限制,比如按位堆放、按排堆放,甚至分港分吨都无必要,只要同排同类原则即可。同排同类是为了ARMG 无需翻倒,同类是指同船同航次同吨级。但是传统集装箱码头堆场计划普遍采用的吨级概念已显过时,吨级是为了配积载时能保证船舶稳心而对出口集装箱进行分吨级,比如将 1~10 吨 的集装箱定为 1 级,10~20 吨 的集装箱定为 2 级,以此类推,也可以更加细分。这种分级办法存在严重缺陷,例如,9 吨 的集装箱与 11 吨 的集装箱本不属于同一吨级,但实际上一些大型船舶对配积载的要求不高,总质量相差 2 吨 以内的集装箱无须分别积载。传统分吨级原则使得系统无法判断和合理安排处于吨级边缘的集装箱。由于自动化集装箱码头堆场收、取箱点的变化,那么箱与箱之间的联系减弱,只需考虑同排内集装箱的关系。如果按传统的堆场计划经验必定会按同排重压轻堆放原则。突破传统思维只分港不区分吨级,引入同排“重量差”的概念。根据同排内重量差安排堆存计划。同一排内重量差不超过n吨,n根据历史经验或者船公司配积载需求进行调整。举例来说明,假设历史经验设定某船所载同排集装箱的质量差为 2 吨,一排内第一个出口箱为 9 吨,第二个箱为 11 吨,那么同排 4 层出口箱形成 2 吨 的吨差,那么该排剩余2 个箱子的重量差必须在 9~11 吨 的范围内任何重量的出口箱。如果第一个出口箱为 9 吨,与其质量差小于2 吨 的出口箱可以堆放在其上层;如果第二个箱子 10 吨,则第三层出口集装箱要么与 9 吨 集装箱形成大 2 吨 的吨差,要么与 10 吨 集装箱形成小 2 吨 的吨差。假设第三层出口箱 8 吨,则第四层只能堆放 8~10 吨 的出口箱。这种同排内根据“吨差”的堆场原则可以确保同排出口箱符合同时配积载的要求。当然可以结合吨级的概念,根据历史经验将不同吨级再细分吨差。
双机配置的缓冲﹠接力模式,可以弥合整个堆场系统的间隙,使整个堆场系统作业保持连贯性。双机缓冲﹠接力模式可以提升堆场系统作业能力。比如陆侧ARMG 空闲可以帮助海侧ARMG 完成翻倒箱等业务,还可以在进口卸船或出口装船时通过接力方式减少海侧 ARMG 行车距离,反之亦然。自动化堆场双机接力没有必要设置专门的缓冲点,各个暂时不作业的箱位和超计划层高的箱位都可以作为缓冲。原则上以繁忙的ARMG 的下一个指令箱位作为缓冲点,比如海侧ARMG 繁忙,那么它的卸箱缓冲点可以在它发箱的箱位,如果下一个指令仍旧是收卸船箱,则可以考虑将两机作业的平衡点位置作为缓冲点。双机的配置也为箱区整理提供了便利,空闲的ARMG 可以利用其进行整理翻倒以保证整个系统的作业效率。可想而知,双机相互弥合的配置突破了传统集装箱堆场区分进口、出口、中转等箱区的规划,使整个业务流程更加均衡。
由于作业指令相互独立性质,我们可以精确地预测每个作业指令的作业时间和作业成本,进而预测整个作业系统的作业时间和成本。同时为更好的自动配积载或计划的事前优劣评估提供了准确的数据支持。另外,与传统集卡工艺也存在很大不同,AGV 端由于不受岸桥和场桥两端效率的影响,因此AGV 的运输过程可以在系统中忽略不计。只要生成如下作业列表就可以清楚判断出作业计划的冲突点加以
箱号作业路指令次序箱位预计时间预计成本
预控,甚至可以再进行事前的优化避开冲突,提升效率和效益,也为自动化码头整个作业指挥系统的自动化打下了坚实基础。只要总体根据∑m桥吊效率≧∑n场桥效率制定计划。据此要求,保证n台ARMG同时能够收、发箱服务于前沿的m台桥吊。由于各箱区的作业指令相互独立,那么出口箱的堆放只要满足在相邻n个箱区内(原则上为船舶靠泊泊位所对应的后场箱区)根据各船各港口平均随机堆放即可。这既是自动化堆场计划的创新点,自动化码头集装箱堆场计划完全打破传统堆场计划的所有规则和原则,只要相对泊位的堆场随机分散同排同类堆放即可。相对泊位是使AGV减少行驶距离,只要满足作业船舶所在泊位对应的堆场即可,中转货物可以根据二程船的箱区堆放。
传统集装箱堆场集中堆放是为了减少轮胎吊行车,由于自动化码头集装箱堆场指令的相对独立性,所以分散堆放可以多点发箱。保证一排 4 层的出口箱同类型,然后按照随机分散原则将一排同类型的出口箱看成一组平均分散在各个相对应的箱区。配积载时通过上文的作业列表调整将所有的冲突点避免,再辅以双机配置的缓冲和接力,完全克服了传统集装箱码头输入、输出不可预知的弊端。
综上所述,自动化集装箱码头堆场的固有特点突破了传统集装箱堆场的局限性。我们应该打破传统计划的思维约束,用全新的视角去审视自动化码头的堆场计划,以期自动化码头管理系统同步实现智能高效。
《港口集装箱机械构造与维修》主要介绍了港口常见集装箱机械的典型构造以及日常维护保养要求。分为集装箱运输基础知识、岸边集装箱装卸桥、集装箱堆场机械、集装箱水平运输机械四个部分。
《港口集装箱机械构造与维修》作为高职高专院校港口机械应用技术专业教学用书,也可供相关专业教学使用,或作为职业技能培训教材,供有关工程技术人员学习参考。
2017年12月29日,《港口集装箱箱区安全作业规程》发布。
2018年7月1日,《港口集装箱箱区安全作业规程》实施。
流动空间重塑下的东亚集装箱港口航运网络研究相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 流动空间
- 流变断裂与瞬态渗流对高边坡稳定的影响
- 流域分布式水文学原理及应用
- 流域土壤侵蚀的快速评估方法及尺度效应
- 流域总蒸发量
- 流域水循环演变机理与水资源高效利用
- 流域水文学
- 流域水文模型参数不确定性量化理论方法与应用
- 流域水文过程变化机理与工程安全
- 流域洪水预报
- 流域环境泥沙养分运移与水质评价
- 流域非点源污染的多尺度水环境响应和控制方法研究
- 流平
- 流形粒子滤波算法及其在视频目标跟踪中的应用
- 流水喷泉风水轮
- 流水回头:南水北调工程开工建设
- 基于压电堆驱动器的喷嘴挡板式气体控制阀
- 磷铵技术改造五大磷肥工程的建议
- 以大豆油多元醇制备的硬质聚氨酯泡沫塑料的性能
- 逆变TIG焊机接触引弧电路的设计(引弧电路)
- 应用模糊数学理论对公路工程建设项目方案的综合评价
- 可替代现有隔热保温材料的新型材料
- 以贯穿项目为核心载体的建筑工程技术专业素材库建设
- 多逆变器太阳能光伏并网发电系统的组群控制方法
- 影响萘高效减水剂与普通硅酸盐水泥适应性的关键因素
- 在全县非煤矿山和危化企业安全生产工作会议上的讲话
- 中国工程造价咨询业的发展趋势
- 支持并行工程和智能CAPP的制造资源建模技术
- 中共重庆市委重庆市人民政府关于建设平安重庆的决定
- 智能建筑工程报警与电视监控系统前端设备的安装施工
- 在“建筑节能与居住舒适”专题技术交流会议上的讲话
- 以MSP430FW427为核心的远程数字水表设计
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
拆边机
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司