机器人焊接系统
机器人焊接系统是一种用于机械工程领域的特种检测仪器,于2018年12月13日启用。
机器人焊接系统基本信息
| 中文名 | 机器人焊接系统 | 产 地 | 中国 |
|---|---|---|---|
| 学科领域 | 机械工程 | 启用日期 | 2018年12月13日 |
| 所属类别 | 特种检测仪器 | ||
焊接/教学实验。
机器人焊接系统造价信息
垂直多关节型;自由度6;可搬质量6kg;重复定位精度±0.08mm。
机器人焊接系统常见问题
-
1、松下焊接机器人整套焊接系统的总功率是2800W。2、功率是指物体在单位时间内所做的功的多少,即功率是描述做功快慢的物理量。功的数量一定,时间越短,功率值就越大。求功率的公式为功率=功/时间...
-
不知道你们厂用的是哪个品牌的机器人。操作机器人入门门槛较低,达到可以操作和简单编程不难,但要达到精通就涉及到知识储备、努力程度、个人悟性等多方面了,没有受过专业的机器人培训是不大可能的;至于焊接部分主...
-
国产机器人焊接工作站 大工件焊接专机龙门式焊接机器人
机器人焊接系统文献

 说明书第一章-机器人焊接系统的构成
说明书第一章-机器人焊接系统的构成
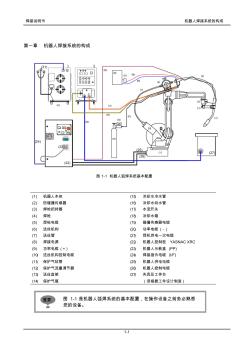
焊接说明书 机器人焊接系统的构成 第一章 机器人焊接系统的构成 ⑵ ⑶ ⑷ ⑴ ⑺ ⑸ ⑹ ⑻ ⑼ ⑽ ⑾ ⑿ ⒀ ⒁ ⒂ ⒃⒄ ⒅ ⒆ ⒇ (21) (22) (23) (24) (25) (26) (27) 图 1-1 机器人弧焊系统基本配置 (1) 机器人本体 (15) 冷却水冷水管 (2) 防碰撞传感器 (16) 冷却水回水管 (3) 焊枪把持器 (17) 水流开关 (4) 焊枪 (18) 冷却水箱 (5) 焊枪电缆 (19) 碰撞传感器电缆 (6) 送丝机构 (20) 功率电缆 (- ) (7) 送丝管 (21) 焊机供电一次电缆 (8) 焊接电源 (22) 机器人控制柜 YASNAC XRC (9) 功率电缆 (+) (23) 机器人示教盒 (PP) (10) 送丝机构控制电缆 (24) 焊接指令电缆 (I/F) (11) 保护气软管 (25) 机器人供电电缆
 视觉系统在机器人焊接中的应用与展望
视觉系统在机器人焊接中的应用与展望
第 24卷 2005年 第 11期 11月 机 械 科 学 与 技 术 M ECHAN ICAL SCIENCE AND TECHNOLOGY Vol. 24 November No. 11 2005 收稿日期 : 2004 10 26 基金项目 :国家自然科学基金项目 (50175027 )资助 作者简介 :刘苏宜 (1974 - ) ,女 (汉 ) ,江西 ,博士研究生 E2mail: irishlsy@163. com 刘苏宜 文章编号 : 1003 28728 (2005 ) 1121296 205 视觉系统在机器人焊接中的应用与展望 刘苏宜 ,王国荣 ,钟继光 (华南理工大学 ,广州 510640 ) 摘 要 :随着焊接生产自动化和智能化程度的提高 ,视觉系统在机器人焊接中的重要性日益凸显 。本文简述了机器 人焊接中视觉系统的分类 、原理 、特点及适用性 ,综述了视觉系统在机
机器人自动化熔化极气体保护焊接。
*具备直流,脉冲等多种焊接工艺,可实现CO2焊、MAG焊、MIG钎焊、MIG/MAG焊不锈钢、MIG焊铝、镍基合金、钴基合金、钢和铝异种材料、不锈钢和铝异种材料、不锈钢和铜异种材料不锈钢,镁等几乎所有金属材料的焊接。 具有冷金属过渡焊接工艺; 焊接机器人臂长1.8米;。
一种基于激光跟踪的焊接系统专利目的
《一种基于激光跟踪的焊接系统》的目的在于提供一种基于激光跟踪的焊接系统,利用激光焊缝跟踪技术应用在焊接设备上,确保更高的焊缝质量和焊接生产率。
一种基于激光跟踪的焊接系统技术方案
《一种基于激光跟踪的焊接系统》包括可进行行走及焊接的焊接小车和焊缝跟踪单元;焊缝跟踪单元,包括激光传感器头和激光控制箱,可检测及识别待焊接工件的焊缝并提供焊缝的检测参数值;激光传感器头包括激光传感器和摄像机,可摄取含有激光标记的图像检测信号,提前地识别焊缝延伸的方向和偏差量以及焊缝的高度;激光控制箱可接收激光传感器头的图像检测信号,根据图像检测信号计算当前待焊接点的检测参数值,检测参数值包括焊缝在焊接小车行走方向上的左右偏差量以及焊缝的高度偏差量;焊接小车内置有焊接调整单元,以根据焊缝跟踪单元的检测参数值调整当前待焊接点处的焊接位置及焊枪高度;焊接调整单元包括小车控制器、焊接电源及焊枪,焊枪可根据小车控制器的指令调整摆动中心以及调整高度;小车控制器接收当前待焊接点处的检测参数值,并读取焊枪当前摆动中心位置量,将焊缝的左右偏差量与焊枪当前摆动中心位置量进行比对计算,得到左右偏移调整值,进而输出执行摆动中心调整指令,实现焊枪在当前待焊接点处的焊接位置调整;小车控制器将当前待焊接点处的焊缝高度偏差量与焊枪实时高度位置变量比对计算,得到高度偏移调整值,进而输出执行高度调整指令,实现焊枪在当前待焊接点处的焊枪高度调整。
其中,焊接小车上设置有十字滑台,十字滑台上设置有焊枪和激光传感器头,激光传感器头位于焊枪的前方位置。
作为一选项,焊接调整单元的焊接位置调整过程的内容如下:
初始化焊接位置的参数变量,参数变量包括焊缝的左右偏差量、焊枪摆动中心位置量、摆动中心调整量、摆动电机螺距及摆动电机齿轮比; 读取当前焊枪的摆动中心位置,存入摆动中心位置量; 接收焊缝的左右偏差量; 判断左右调整方向:定义在行走方向上当前待焊接点处于左边时左右偏差量为负,在行走方向上当前待焊接点处于右边时左右偏差量为正;分析左右偏差量,若左右偏差量为正则向右边偏移,若左右偏差量为负则向左边偏移; 根据参数变量计算摆动中心调整量; 控制摆动中心作出调整。 作为一选项,焊枪高度调整过程的内容如下: 初始化高度位置各个参数变量,包括高度偏差量、高度调整量、高度电机螺距、高度电机齿轮比及高度位置变量; 实时读取当前焊枪的高度位置,存入高度位置变量; 读取焊枪的高度偏差量; 判断高度调整方向,其中,高度偏差量具有正负数,定义在高度方向上当前待焊接点高度比预设高度低时高度偏差量为正数,反之则为负数; 根据参数变量计算高度调整量; 执行高度位置调整。
一种基于激光跟踪的焊接系统改善效果
《一种基于激光跟踪的焊接系统》根据跟踪单元的实时提前监控,实时计算,得出焊枪的高度和水平两个方向的偏差量,焊接小车做出相应的调整,达到焊枪始终保持在焊缝的中心和适当的上下位置,实现基于激光跟踪的焊接应用。
机器人焊接系统相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 机器人焊接编程与应用
- 机器人管家
- 机器人行李箱
- 机器人西蒙
- 机器人设计与制作
- 机器人跑堂
- 机器人防护服
- 机器学习项目开发实战
- 机器教学
- 机器视觉与边缘计算应用
- 机器视觉自动检测技术
- 机器运算
- 机场航站楼室内装饰装修工程技术规程
- 机场防护工程
- 机密机械设计基础
- 机床回转油缸
- 智能建筑火灾自动报警与消防联动系统设计及应用效果
- 有线电视广播系统运行维护规程编制情况和宣贯要点
- 在项目成本控制中的实践与探索工程项目成本管理系统
- 再谈VRV空调系统设计与施工中有关问题的解决方法
- 中国电工技术学会电力系统控制与保护专业委员会成立
- 用于制冷系统稳定运行时制冷剂分布测试的新方法
- 张力式电子围栏周界防范报警系统设计原理及应用现状
- 智能化的供配电系统设计解决方案
- 变频控制多联式空调系统
- 一拖多变频空调产品测试系统与室外机通信接口
- 在楼宇自控系统设计中如何选择最佳的电动调节阀口径
- 中国工商银行广东省分行信息化办公系统的设计与实现
- 引子渡水电站溢洪道弧形工作闸门焊接变形与处理
- 新型转轮除湿与双级热泵耦合空调系统及系统设计
- 智能建筑综合布线系统安装分项检验批质量验收记录表
- 能跨越水平窗框障碍的玻璃幕墙清洗机器人的设计
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
拆边机
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司