机床坐标系
在数控编程时为了描述机床的运动,简化程序编制的方法及保证记录数据的互换性,数控机床的坐标系和运动方向均已标准化,ISO和我国都拟定了命名的标准。 机床坐标系( Machine Coordinate System )是以机床原点O为坐标系原点并遵循右手笛卡尔直角坐标系建立的由X、Y、Z轴组成的直角坐标系。 机床坐标系是用来确定工件坐标系的基本坐标系。是机床上固有的坐标系,并设有固定的坐标原点。
机床坐标系基本信息
| 中文名称 | 机床坐标系 | 外文名称 | Machine Coordinate System |
|---|---|---|---|
| 坐标原则 | 遵循右手笛卡儿直角坐标系。 | 坐标轴 | 先确定Z轴。 |
机床坐标系确定方法
坐标原则
1、遵循右手笛卡儿直角坐标系。
2、永远假设工件是静止的,刀具相对于工件运动。
3、刀具远离工件的方向为正方向。
坐标轴
1、先确定Z轴。
a、传递主要切削力的主轴为Z轴。
b、若没有主轴,则Z轴垂直于工件装夹面。
c、若有多个主轴,选择一个垂直于工件装夹面的主轴为Z轴。
2、再确定X轴。(X轴始终水平,且平行于工件装夹面)
a、没有回转刀具和工件,X轴平行于主要切削方向。(牛头刨)
b、有回转工件,X轴是径向的,且平行于横滑座。(车、磨)
c、有刀具回转的机床,分以下三类:
Z轴水平,由刀具主轴向工件看,X轴水平向右。
Z轴垂直,由刀具主轴向立柱看,X轴水平向右。
龙门机床,由刀具主轴向左侧立柱看,X轴水平向右。
3、最后确定Y轴。按右手笛卡儿直角坐标系确定。
旋转运动及附加轴
1、旋转运动。
绕X、Y、Z轴的旋转运动分别用A、B、C来表示,按右手螺旋定则确定正方向。
2、附加轴。
a、附加轴的移动用U、V、W和P、Q、R表示。
b、附加轴的旋转用D、E、F表示。
3、工件的运动。
工件运动的正方向与刀具运动的正方向正好相反。分别用+X'、+Y'、+Z'表示。
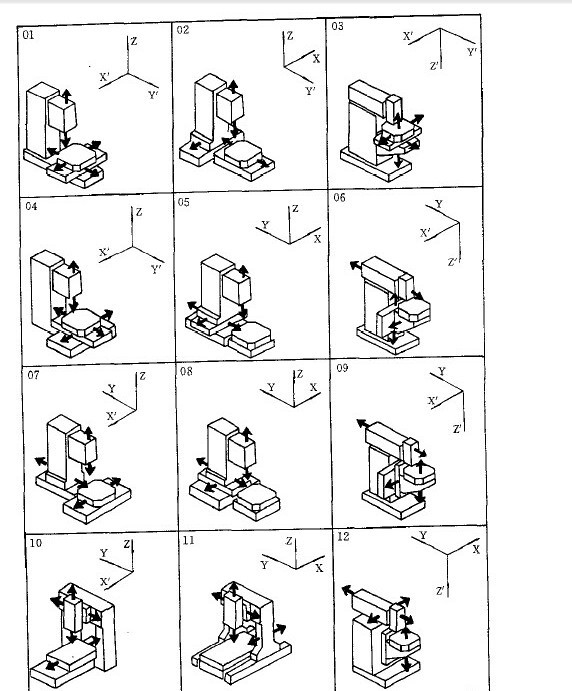
常见数控机床的坐标系。
机床坐标系造价信息
在数控编程时为了描述机床的运动,简化程序编制的方法及保证纪录数据的互换性,以机床原点O为坐标系原点并遵循右手笛卡尔直角坐标系建立的由X、Y、Z轴组成的固定的直角坐标系。
机床坐标系常见问题
-
数控机床的坐标系 一.确定原则(JB3052-82) 1.相对静止、工件运动的原则:这样编程人员在不知是移近工件还是工件移近的情况下,就可以依据零件图纸,确定加工的过程。 2.标准坐标系原则:即机床坐...
-
没有什么很好的办法,一般都是根据道路形状和平面尺寸将其划分成若干块,再根据坐标确定位置和详细几何尺寸,然后根据平面图形分别利用几何数据计算而成的。其实,倒不如去现场直接丈量求得近似值来的省心。
-
1.数控机床的坐标轴是怎样规定的?试按笛卡儿坐标系确定数控...
坐标系确定原则: 1.相对静止、工件运动的原则:这样编程人员在不知是移近工件还是工件移近的情况下,就可以依据零件图纸,确定加工的过程。 2.标准坐标系原则:即机床坐标系确定机床上运动的大小与方向,以完...
机床坐标系文献

 测量坐标系与施工坐标系转换
测量坐标系与施工坐标系转换
拟定起点 O里程K0 拟定起点 O坐标X0 拟定起点 O坐标Y0 ° ′ ″ 231 27 40.32 任意点P坐标XP 任意点P坐标YP 任意点P坐标XP 任意点P坐标YP 序 号 名 称 任意点P 坐标X 任意点P 坐标Y 名 称 任意点P 坐标X 任意点P 坐标Y 1 测量坐标系 2506578.190 转换→ 施工坐标系 5.448 -8.445 2 测量坐标系 9277.224 转换→ 施工坐标系 1935801.148 -1650783.934 3 测量坐标系 转换→ 施工坐标系 0.000 0.000 4 测量坐标系 转换→ 施工坐标系 0.000 0.000 5 测量坐标系 转换→ 施工坐标系 0.000 0.000 白色区域为输 入项 说明:一般情 况下可以以 X' 为里程方向, Y‘为偏距 注意:此程序 只利用在直线 线型或房建假 设坐标系中 492358.248 拟定
 城建坐标系和施工坐标系换算分析
城建坐标系和施工坐标系换算分析
坐标换算一般由设计部门来完成,但设计部门一般只换算两个或少数几个,为了工程施工需要,其余的只有施工单位自己换算。即使设计部门全部换算完,施工单位使用前也要自己复核换算一遍,所以,工程技术人员必须掌握坐标换算的具体换算公式和方法。一、城建坐标系和施工坐标系的关系施工方格网是专门为建筑工程施工放线而设计的,为了更好地保证放线工作精确、方便和快捷,一般要求构成方格网的纵、
数控机床坐标系与五轴联动数控机床是一种高度机电一体化的产品,具有高效率、高精度、高柔性,是利用自动控制技术和微电子技术发展起来的高技术产品。
数控机床采用数字化信号通过伺服机构对机床运动及其加工过程进行控制,从而使机床自动完成零件加工。
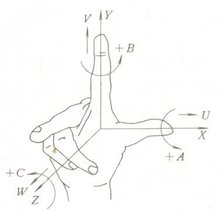
数控机床的可控坐标轴及坐标系是用程序编制的文字地址语言描述运动轨迹的基础,标准的坐标系是右手直角坐标系,姆指为X轴,食指为Y轴,中指为Z轴,指尖指向各坐标轴的正方向,即增大刀具和工件距离的方向。
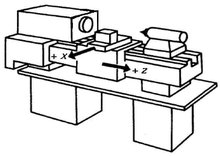
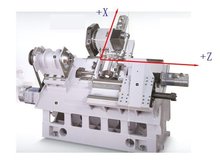
如果在X、Y、Z轴之外还有平行于它们的直线运动,分别指定为U、V、W轴,如还有第三组运动,则指定为P、Q、R。若有旋转轴时,规定绕X、Y、Z轴的旋转轴分别为A、B、C轴,其方向为右旋螺纹方向。例如:数控刨台式铣镗床,镗轴横向移动定义为Z轴,立柱在Z方向上的移动即定义为W轴,主轴箱上下移动定义为Y轴,围绕Y轴的旋转工作台定义为B轴,工作台左右移动定义为X轴。
直线坐标轴X、Y、Z的判定顺序是:先Z轴,再X轴,最后按右手定则判定Y轴。Z坐标轴的运动由传递切削力的主轴决定,X坐标轴的运动是水平的,它平行于工件装夹面,Y坐标轴根据X、Z坐标轴,按照右手直角坐标系确定。
根据加工要求不同,数控机床可以实现不同的配置,例如:三轴二联动、三轴三联动、四轴三联动、五轴四联动、六轴五联动、七轴五联动、九轴五联动等。三轴、四轴等是指可控制的运动坐标轴数,联动是指可以按特定的函数关系同时控制的运动坐标轴数,从而实现刀具相对工件的位置和速度控制。一般情况下,通过五轴联动方式即可实现连续轨迹控制,用于加工复杂的空间曲面。
五轴联动数控机床一般控制三个直线坐标轴和两个旋转坐标轴同时运动,使刀具和工件能够按照规定的运动轨迹进行切削加工,适合于加工叶片、螺旋桨、机翼等复杂型面的零件。两个旋转坐标轴可以是转台的回转及刀具的摆动,也可以是控制平转台和立转台的联动,或控制刀具作两个方向的摆动。 2100433B
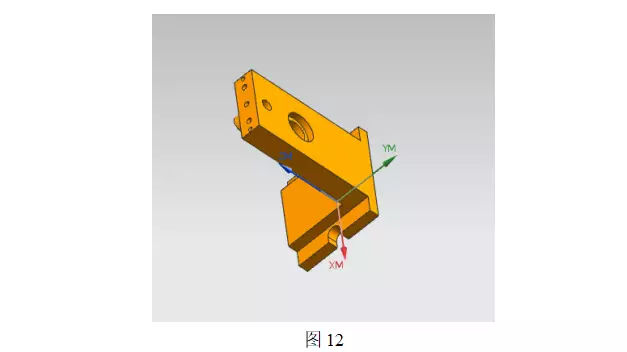
UG仿真加工推动架夹具φ32的孔
一.打开模型文件并进入加工模块

二.创建几何体
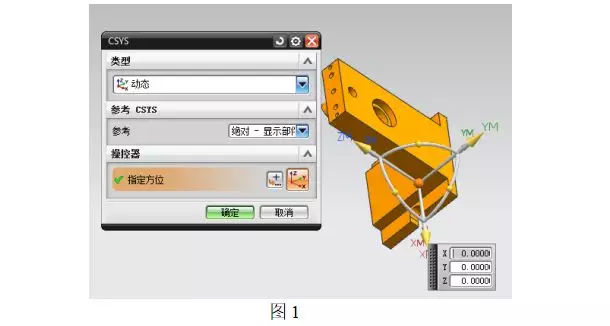
2.1创建机床坐标系

2.设置机床坐标系与系统默认机床坐标系位置在方向的偏距值为0,如图1所示。
2.2创建安全平面

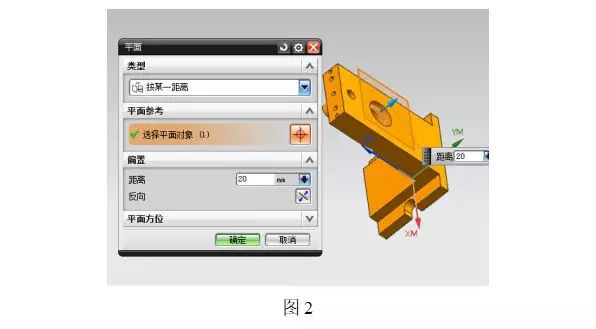
2.设置安全平面与图2所示的模型表面偏距值为20.
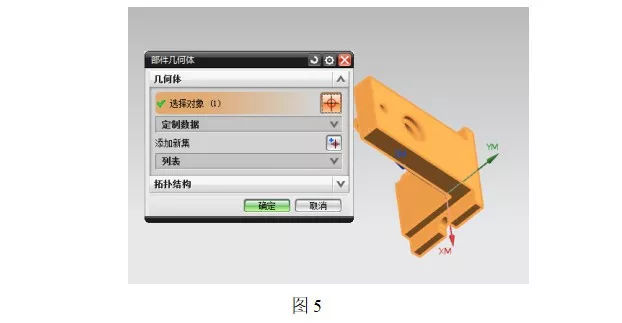
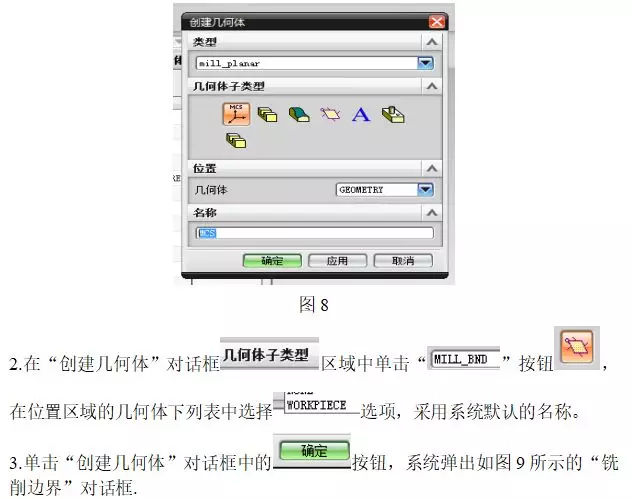
2.3.创建部件几何体



2.确认“选择条”工具条中的“类型过滤器”设置为“实体”在图形区选取整个零件为部件几何体,如图5所示。
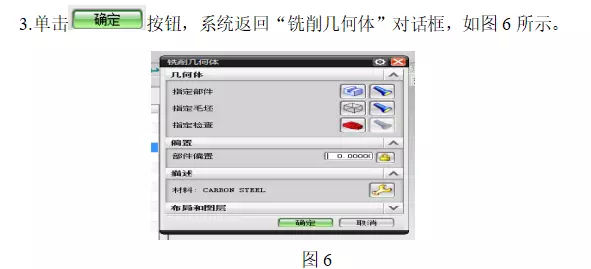
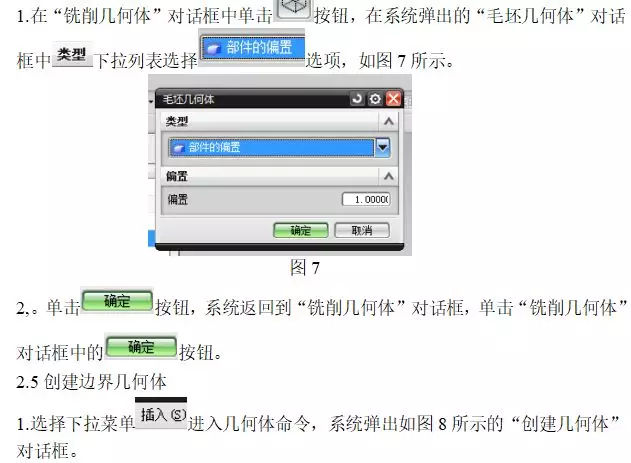
2.4.创建毛坯几何体
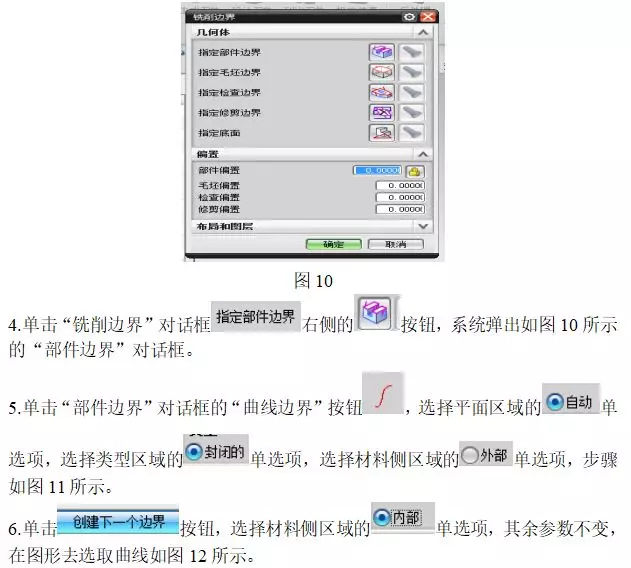
7.单击确定按钮。完成边界的创建,返回到“铣削边界”对话框。
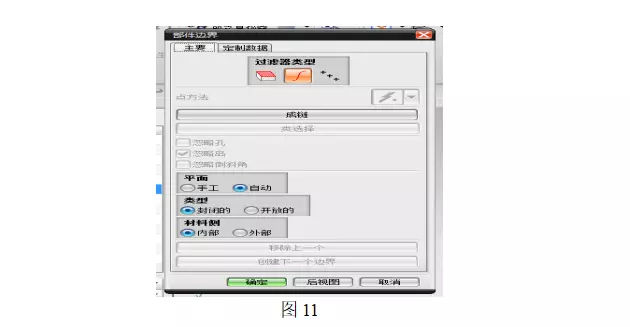
8.单击指定按钮,系统弹出“平面”对话框,在图形去中选取零件图底面为参照。
9,单击确定按钮,完成边界几何体的创建。
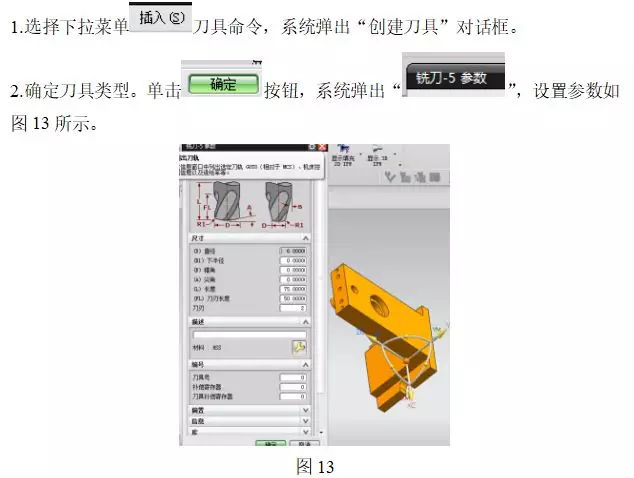
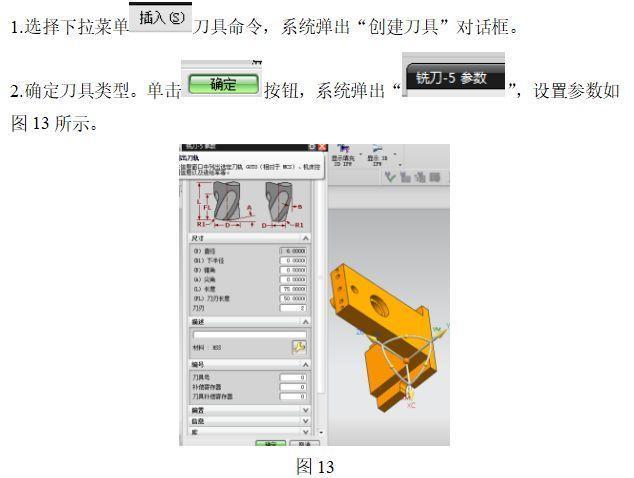
三.创建刀具
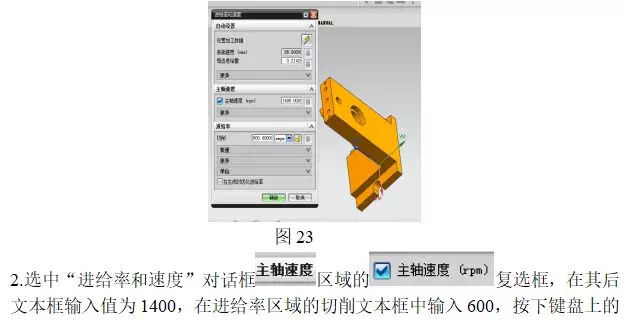
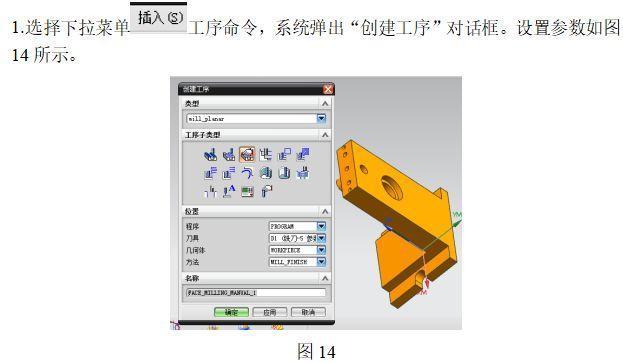
四.创建平面铣工序
4.1.创建工序

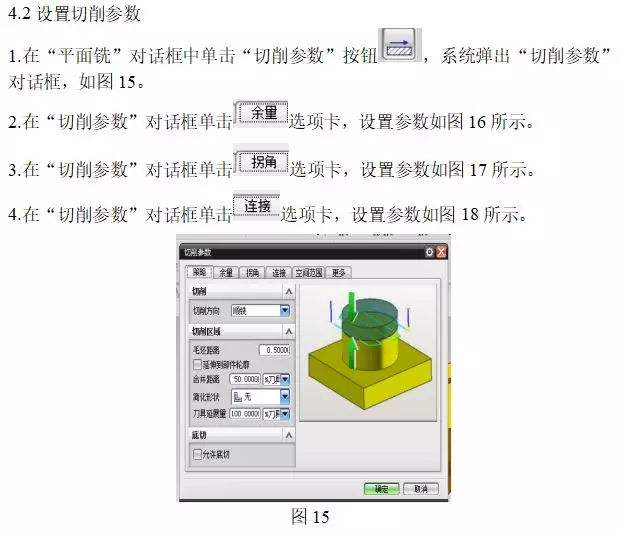
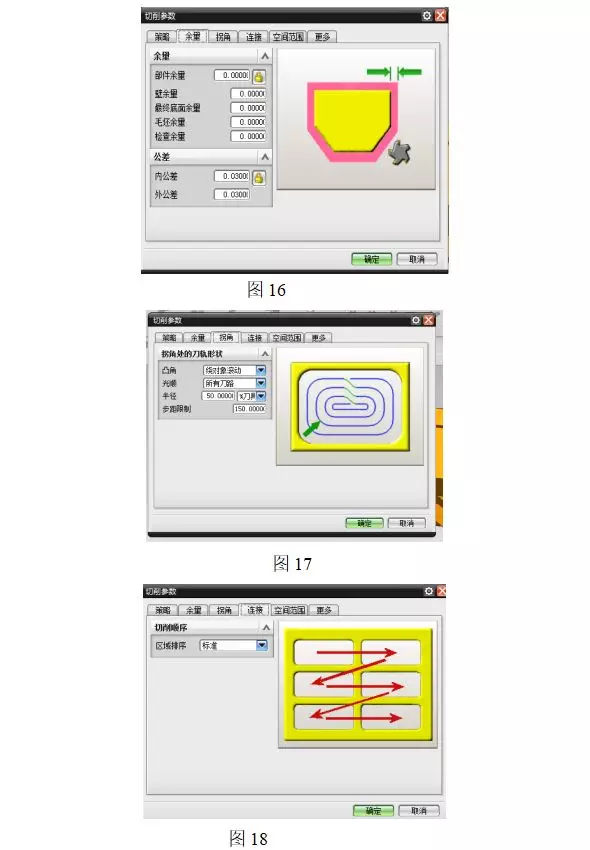
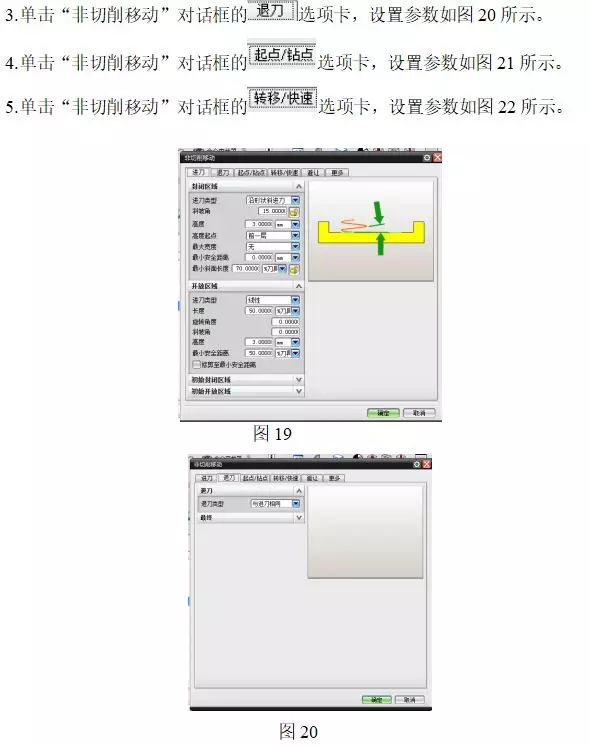
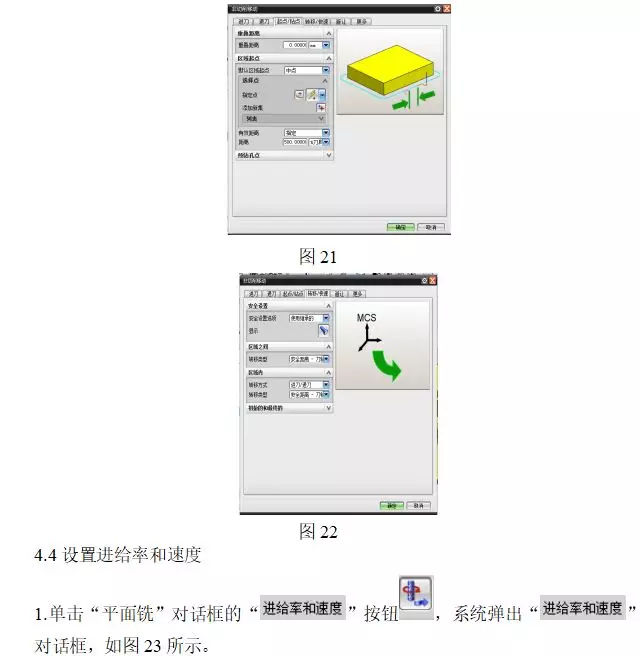
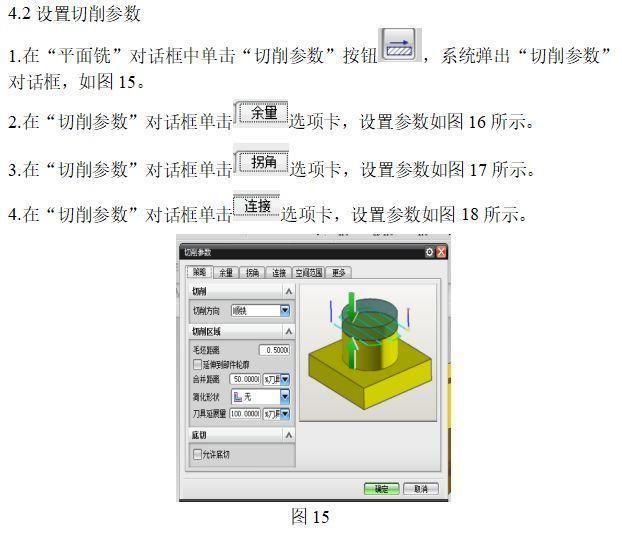
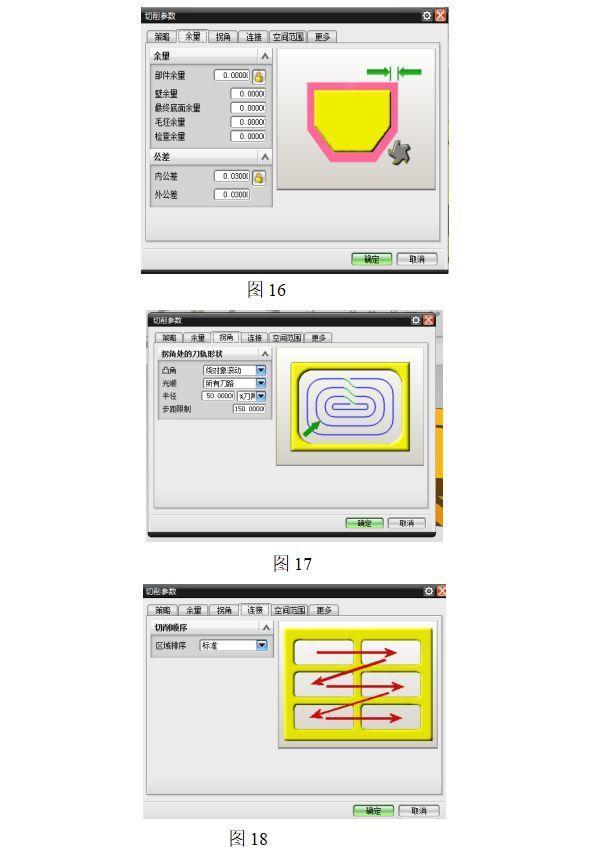
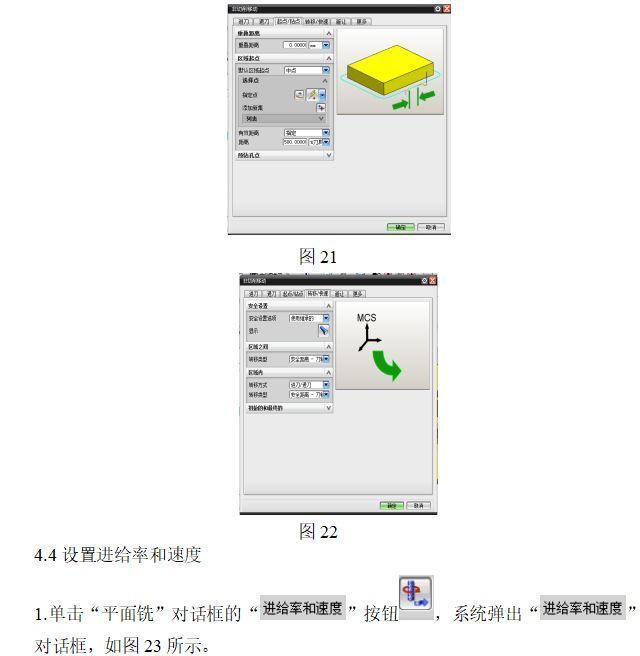
4.3设置非切削移动参数


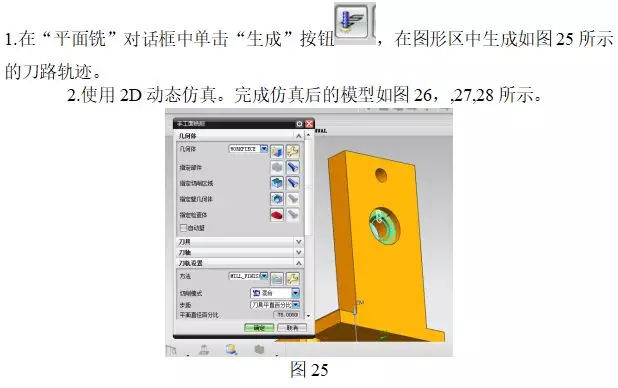
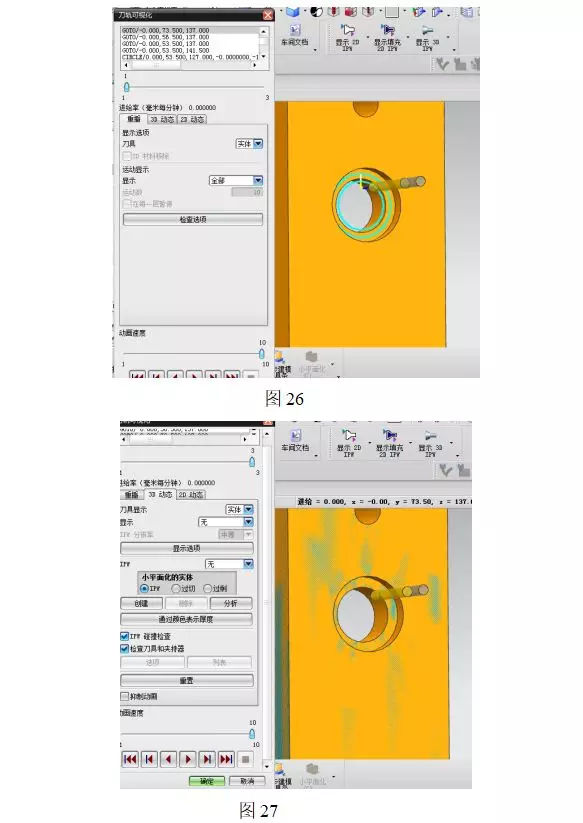
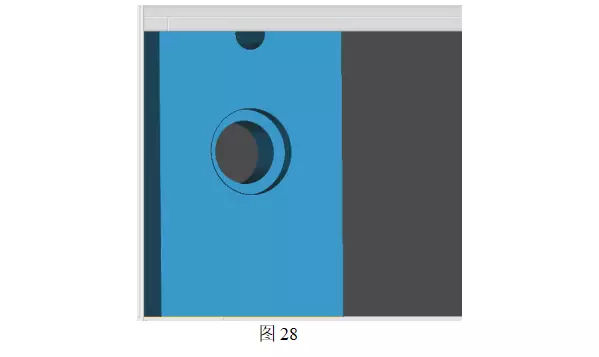
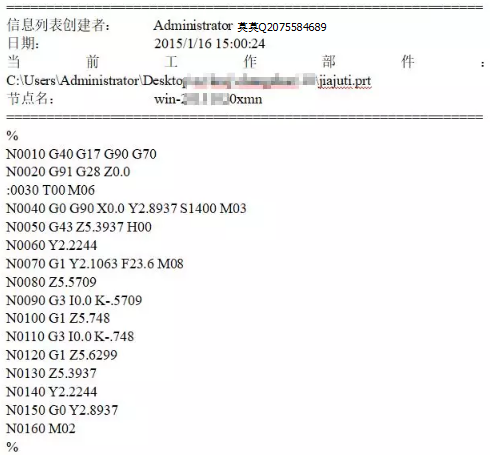
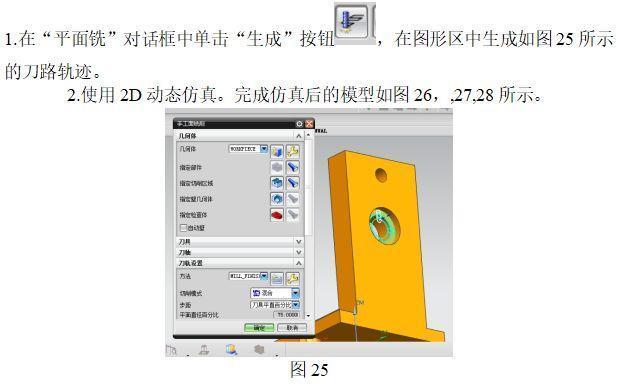
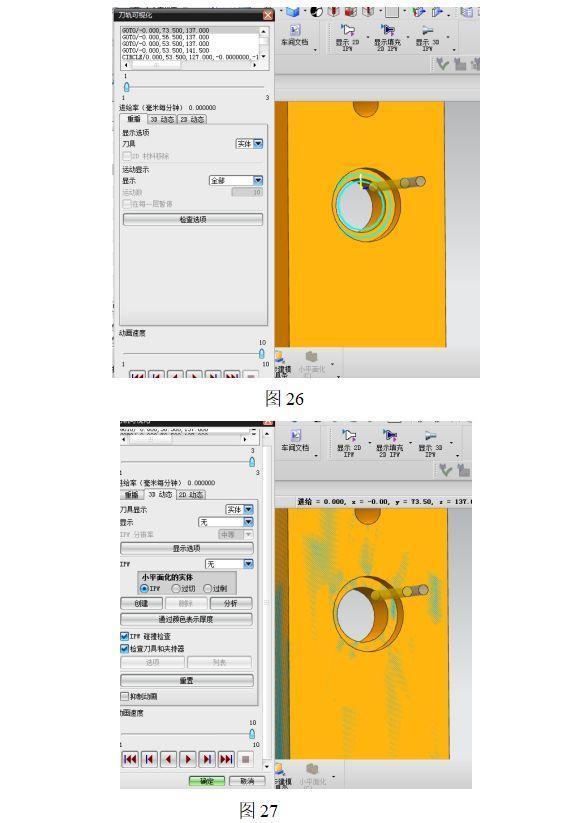
五.生成刀路轨迹并仿真
UG仿真加工推动架夹具φ32的孔
一.打开模型文件并进入加工模块
二.创建几何体
2.1创建机床坐标系
2.设置机床坐标系与系统默认机床坐标系位置在方向的偏距值为0,如图1所示。
2.2创建安全平面


2.设置安全平面与图2所示的模型表面偏距值为20.
2.3.创建部件几何体



2.确认“选择条”工具条中的“类型过滤器”设置为“实体”在图形区选取整个零件为部件几何体,如图5所示。


2.4.创建毛坯几何体



7.单击确定按钮。完成边界的创建,返回到“铣削边界”对话框。
8.单击指定按钮,系统弹出“平面”对话框,在图形去中选取零件图底面为参照。
9,单击确定按钮,完成边界几何体的创建。想学UG编程,在610677581群可以帮助你。


三.创建刀具
四.创建平面铣工序
4.1.创建工序
4.3设置非切削移动参数



五.生成刀路轨迹并仿真

机床坐标系相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 绿绒嵩
- 摆式剪板机
- 盛大金磐
- 两位三通阀
- TMS320F28335
- 数控机床机械装调技术
- 碳钢三通
- 车工加工工艺经验实例
- 机械零件数控铣削加工工作页
- 锥花绿绒蒿
- 自力式三通温度调节阀
- D-Sub
- T型三通球阀
- 主轴回转精度
- 不锈钢三通球阀
- 数控机床结构
- 在数控机床上通过监视主轴电机负荷实时监控刀具寿命
- 机电设备评估基础金属切削机床
- 基于工作过程机床电气控制技术课程整体设计
- 埃马克中国机械有限公司高端数控机床项目奠基仪式举行
- 机床微机控制系统与机床改造讲座第三讲零件
- 数控机床电气控制讲座数控系统基本知识
- PLC控制系统及其通信技术在大型机床设备改造中的应用
- 机床评价系统中机床人机工程多级模糊评价方法研究
- 十三五重点项目金属切削数控机床制造项目资金申请报告
- 双滚柱机床螺纹滚头轴向进给滚压螺纹时形成尺寸链的分析
- 一体化教学模式在数控机床电气控制课程教学中的实践
- PLC对挖掘机中心控制阀体加工组合机床的控制改造
- 不确定度评定法预测再制造机床定位精度及其工程应用
- 机床导轨磨损修复工艺及塑料导轨软带应用
- 发现市场空隙反向切入杰克机床从缝纫机到机床
- 中级维修电工四级模拟练习题机床电气控制
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
拆边机
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
电梯平层准确度
建设部关于开展城市规划动态监测工作的通知
广州利好来电气有限公司
四川中泽盛世招标代理有限公司