角速度单位
当圆的半径相同时,圆心角θ越大,它所对应圆的弧越长,二者成正比.因此可以用弧长与半径的比值表示圆心角的大小。
例如,弧长是0.12m,半径是0.1m,那么θ=0.12m÷0.1m=1.2.
弧长与半径的单位都是米,在计算二者之比时要消掉.为了表述的方便,我们“给”θ一个单位:弧度,用符号rad表示。这样,上面计算得到的角θ就是1.2弧度,记为θ=1.2rad.
对于一个圆,θ=2πrad=360°,则
角位移的单位是rad,角速度的单位是s-1或rad/s.
角速度造价信息
设一质点在平面Oxy内,绕质点O作圆周运动.如果在时刻t,质点在A点,半径OA与Ox轴成θ角,θ角叫做角位置.在时刻t Δt,质点到达B点,半径OB与Ox轴成θ Δθ角。就是说,在Δt时间内,质点转过角度Δθ,此Δθ角叫做质点对O点的角位移。角位移不但有大小而且有转向。一般规定沿逆时针转向的角位移取正值,沿顺时针转向的角位移取负值。
角位移Δθ与时间Δt之比在Δt趋近于零时的极限值为
ω叫做某一时刻t质点对O点的瞬时角速度(简称角速度)。
角速度是矢量。按右手螺旋定则,大拇指方向为ω方向.当质点作逆时针旋转时,ω向上;作顺时针旋转时,ω向下。
设线速度为v,取圆心为原点,设位矢(位置矢量)为r,则
v=ω×r
该式可以作为角速度这个物理量的普遍定义式。
角速度单位常见问题
-
连接运动质点和圆心的半径在单位时间内转过的弧度叫做角速度。它是描述物体转动或一质点绕另一质点转动的快慢和转动方向的物理量
-
ω=2π/T因为:连接运动质点和圆心的半径在单位时间内转过的弧度叫做“角速度”。它是描述物体转动或一质点绕另一质点转动的快慢和转动方向的物理量。 首先:360°/T 也是角速度,不过单位是 °/s ...
-
角速度ω=Φ/t,是弧度/秒,角度Φ应用弧度代入。比如每秒转一圈,角度,Φ=2π ,角速度=2π rad/s,这里2π是就是弧度,即360度,即一圈。
角坐标φ和角位移Δφ不是矢量。令Δt→0,则角位移Δφ以零为极限,称为无限小角位移。无限小角位移忽略高阶无穷小量后称为微分角位移,记为dφ.可以证明,dφ是矢量.进而,角速度ω=dφ/dt也是矢量。
角速度ω是伪矢量。 右手系改为左手系时,角速度反向.其本质是二阶张量(Ω),而一般矢量的本质是一阶张量,因此,矢量是角速度的简便表达,张量是角速度的准确表达。 2100433B
角速度单位文献

 微小型航天器无角速度测量姿态控制
微小型航天器无角速度测量姿态控制
研究微小型航天器姿态跟踪在角速度不可测量以及控制力矩受限情况下的的控制方法。首先基于无源性原理,仪依赖姿态测量,建立一个类似PD控制的方法。为了让初始状态和角度误差始终在合理的控制范围内,对误差函数加入跳变规则,从而获得一种混合控制方法;然后利用Lyapunov原理证明了闭环系统的全局渐进稳定性;最后通过仿真与已有方法进行比较研究,验证了控制方法的有效性,即使初始速度估计误差和初始角度误差很大,依然可以控制。
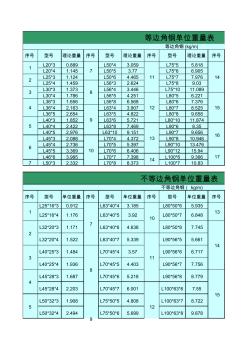 角钢单位重量表
角钢单位重量表
序号 型号 理论重量 序号 型号 理论重量 序号 型号 理论重量 序号 L20*3 0.889 L50*4 3.059 L75*5 5.818 L20*4 1.145 L50*5 3.77 L75*6 6.905 L25*3 1.124 L50*6 4.465 L75*7 7.976 L25*4 1.459 L56*3 2.624 L75*8 9.03 L30*3 1.373 L56*4 3.446 L75*10 11.089 L30*4 1.786 L56*5 4.251 L80*5 6.221 L36*3 1.656 L56*8 6.568 L80*6 7.376 L36*4 2,163 L63*4 3.907 L80*7 8.525 L36*5 2,654 L63*5 4.822 L80*8 9.658 L40*3 1.852 L63*6 5.721 L80*10 11.874 L4
当电机功率限定时,指电机接到电压为额定值的106%的电源时,满载荷转头所产生的角速度。
- 中文名称
- 最大角速度
- 英文名称
- maximum angular velocity
- 定 义
- 当电机功率限定时,指电机接到电压为额定值的106%的电源时,满载荷转头所产生的角速度。
- 应用学科
- 机械工程(一级学科),实验室仪器和装置(二级学科),实验室离心机-实验室离心机一般名词(三级学科)
采用分层控制策略,提出基于主动转向和差动制动的汽车横摆角速度协调控制过程;研究基于主动转向的间接横摆力矩控制方法和基于差动制动的直接横摆力矩控制方法,建立汽车横摆角速度控制模型;分析协调控制器的监测参数和控制参数,基于急转意图识别、汽车信息处理和横摆角速度分配控制,建立协调控制器模型。
角速度控制汽车横摆角速度的协调控制过程
汽车在路面上低速行驶时,驾驶意图实现较为容易,主动转向控制和差动制动控制均无需启动。当汽车高速行驶时,主动转向控制将启动,用来保证驾驶员的转向意图以及抵抗侧向风等干扰;当转向角较大,轮胎工作在非线性区域时,单靠转向系统已无法实现转向意图,此时差动制动控制将触发工作,利用差动制动实现直接横摆力矩控制,以保证驾驶员的驾驶意图,实现汽车行驶稳定性控制。
控制功能的触发都是通过监测质心侧偏角和横摆角速度来实现的,并未考虑与驾驶员主观驾驶意图相关的方向盘转角等参数。急转工况中,差动制动触发在汽车危险状态,此时汽车质心侧偏角较大,驾驶员很容易因为横摆角速度阶跃变化等干扰而操作不当,引发危险。
基于主动转向和差动制动的汽车横摆角速度协调控制过程。汽车横摆角速度协调控制器首先要监测汽车行驶状态和驾驶员转向意图,判断汽车行驶工况和预期的转向程度;其次根据汽车行驶状态计算出期望横摆角速度;根据期望横摆角速度与实际横摆角速度偏差作为输入,计算出所需的横摆角速度偏差;最后分别分配给主动转向控制和差动制动控制,实现附加前轮转角和独立轮胎制动力控制。
角速度控制汽车横摆角速度协调控制器模型
汽车横摆角速度协调控制器整体结构中,主要包括驾驶员急转意图识别模块、汽车信息处理模块和横摆角速度分配控制模块,通过监测汽车方向盘信号和车速信号,进行处理得到所需的控制参数。在仿真分析时将其简称为AEBD。
汽车横摆角速度协调控制器通过驾驶员急转意图识别,作为其工作的触发条件,通过汽车信息处理模块进行横摆角速度偏差的计算,并通过横摆角速度控制进行权重的分配。
(1)驾驶员急转意图识别模块:控制器对驾驶员急转意图的识别主要依据驾驶员急转意图识别模型,通过对方向盘转角、方向盘转速、车速和方向盘饱和转角进行建模,将信息进行处理后赋值权重PstartP进行控制器触发。
(2)汽车信息处理模块:汽车信息处理模块主要包括方向盘转角和车速信号的采集,期望横摆角速度和转向饱和时方向盘转角的计算以及质心侧偏角的估算。
(3)横摆角速度分配控制模块:汽车横摆角速度协调控制器的核心主要是对期望横摆角速度和实际横摆角速度的差值进行权重分配,通过计算,最终通过主动转向和差动制动分别提供附加前轮转角和附加横摆力矩。
基于主动转向和差动制动的汽车横摆角速度协调控制器模型中,主要包括Carsim环节和Simulink 环节,并通过S函数将两者进行联合。其中,Carsim的输入参数为后轮的两个制动器控制参数和前轮叠加转角,是控制器作用在汽车上的控制变量;Carsim的输出参数为车速、方向盘转角、实际横摆角速度和实际质心侧偏角,它们在现实环境中是通过传感器测量获得的。
基于主动转向和差动制动的汽车横摆角速度协调控制器模型为汽车横摆角速度协调控制器模型在Carsim整车环境中进行联合仿真验证,其中Drive_signal、Vehicle_model和YC_model模块分别是驾驶员急转意图识别模块、汽车信息处理模块和横摆角速度分配控制模块的仿真模型,并进行了封装处理。 2100433B
在简谐振动中,角频率与振动物体间的速度 v 的关系为
在圆周运动中,角速度与线速度之间的关系为
以上可以看出,圆周运动中的角速度ω与简谐振动中的角频率ω,虽然单位相同且都有
角速度相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 云南省氯碱PVC行业清洁生产合格单位评价指标体系
- 云南省机关事业单位编制外人员劳动合同书(修改后)
- 中国建设工程鲁班奖(国家优质工程)申报单位承诺书
- 招标选择政府投资工程委托代建单位中报价文件的评选
- 中国室内装饰设计施工单位资质等级管理办法及申请表
- 关于高速公路运营管理单位有效实施全面预算管理
- 关于当前农村水利基层单位配套改革财务管理几点思考
- 工程施工安全检查用表监理单位专用与施工单位内业专用
- 关于规范单位工程施工组织设计内容编写通知
- 关于国有水利工程建设单位自用固定资产核算一点思考
- 关于加强生产经营单位生产安全事故应急预案管理工作
- 工程监理单位项目总监(总监代表)带班生产情况记录表
- 工程量清单报价中投标单位企业最低成本测算方法
- 光伏区电气设备安装单位工程质量验收评定表收集资料
- 改进输电线路工程单位造价指标
- 农田水利基本建设先进单位决定
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
广东国咨招标有限公司
Excel 数据处理与分析应用大全
甘肃中泰博瑞工程项目管理咨询有限公司
拆边机
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
电梯平层准确度
建设部关于开展城市规划动态监测工作的通知
广州利好来电气有限公司
苏州弘创招投标代理有限公司