激光干涉测速仪技术指标
激光波长1550nm;最大输入光功率小于500mW;测速范围0.1m/s-80000m/s;上升时间小于100ps;功耗小于100W。
激光干涉测速仪造价信息
该测速仪主要用于冲击波物理和爆轰物理研究中位移或速度剖面的连续观测。 2100433B
激光干涉测速仪技术指标常见问题
-
干涉原理上来说,白光和激光没有本质区别,就是频率有差别而已 。但目前使用的大部分迈克尔逊干涉仪是 白光式的。
-
1、钢筋55-60kg/m2左右,混凝土0.4m3/m2左右;2、50kg/m2左右,混凝土0.6m3/m2左右3、钢筋55-60kg/m2左右,混凝土0.55m3/m2左右4、钢筋120kg/m2左...
-
套完价,在工程设置中输入相应的建筑面积,这样才会相应的指标。
激光干涉测速仪技术指标文献

 激光干涉仪技术参数
激光干涉仪技术参数
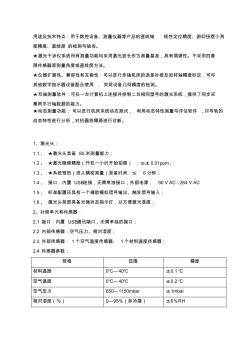
用途及技术特点:用于数控设备、测量仪器等产品的直线轴 线性定位精度、俯仰扭摆小角 度精度、直线度 的检测与验收。 ★激光干涉仪系统所有测量功能均采用激光波长作为测量基准,具有溯源性。不采用四象 限传感器等测量角度或直线度方法。 ★仪器扩展性、兼容性和互换性:可以进行多轴机床的误差补偿及回转轴精度标定,可与 其他数字指示器设备配合使用 , 实现设备几何精度的检测。 ★双轴测量软件:可在一台计算机上连接并控制二台相同型号的激光系统,提供了同步采 集两平行轴数据的能力。 ★动态测量功能: 可以进行机床系统动态测试, 利用动态特性测量与评估软件 ,对导轨的 动态特性进行分析,对机器故障源进行诊断。 1、激光头: 1.1、 ★激光头具备 80米测量能力; 1.2、 ★激光稳频精度(开机一小时开始拍频) :≤± 0.01ppm; 1.3、 ★系统预热(进入精密测量)准备时间:≤ 6分钟; 1.4、 接
 激光干涉仪使用方法
激光干涉仪使用方法
用激光干涉仪系统进行精确的线性测量 — 最佳操作及实践经验 1 简介 本文描述的最佳操作步骤及实践经验主要针对使用激光干涉仪校准机床如车床、铣床以及 坐标测量机的线性精度。但是,文中描述的一般原则适用于所有情况。与激光测量方法相 关的其它项目,如角度、平面度、直线度和平行度测量不包括在内,用于实现 0.1 微米即 0.1 ppm 以下的短距离精度测量的特殊方法(如真空操作)也不包括在内。 微米是极小的距离测量单位。( 1 微米比一根头发的 1/25 还细。由于太细,所以肉眼无 法看到,接近于传统光学显微镜的极限值)。可实现微米级及更高分辨率的数显表的广泛 使用,为用户提供了令人满意的测量精度。尽管测量值在小数点后有很多位数,但并不表 明都很精确。(在许多情况下精度比显示的分辨率低 10-100 倍)。实现 1 微米的测量分 辨率很容易,但要得到 1 微米的测量精度需要特别注意一些细节。本文
激光多普勒测速仪是应用多普勒效应,利用激光的高相干性和高能量测量流 体或固体流速的一种仪器。 2束光强大致相当、频率差40MHz的激光,经过光纤探头,形成一个椭球体的测量 体,该测量体内的干涉条纹间距和探头的口径、焦距、激光的波长有关。粒子穿过 测量体,产生多普勒频率,该频率的大小和粒子穿过测量的速度有线性关系,该频 率的相位信号和粒径有线性关系。测量多普勒频率,就可以得到粒子的速度和粒径 信息。
激光测速仪是通过激光发射测量一定时间间隔内被测物体的移动距离,计算得出物体 移动速度的装置。
激光测速仪采用的是激光测距的原理。激光测距(即电磁波,其速度为30万公里/秒),是通过对被测物体发射激光光束,并接收该激光光束的反射波,记录该时间差,来确定被测物体与测试点的距离。激光测速仪对被测物体进行两次有特定时间间隔的激光测距,取得在该一时段内被测物体的移动距离,从而得到该被测物体的移动速度。
特点
激光测速仪具有以下几个特点:
①测速距离相对于雷达测速有效距离远,可测到1000米的距离;
②测速精度高,误差<1000米/时;
③由于激光测速靠激光反射测得,如果被测车辆距离较远,且处于移动状态,会导致激光测速成功率低、难度大;
④只能在静止状态下应用;
⑤取证能力远远大于雷达测速仪,因此受到全世界广泛的认可和推广。
针对激光测速仪的缺点,出现了激光多普勒测速仪,它具有非接触测量、精度高、测点小、动态响应快、可测多维速度和判别速度方向等优点。
应用
有一种名为激光测速取证系统的新型激光测速仪,该系统包括测定车辆速度的激光速度探测器和摄像机。使用时,测速仪对每一辆驶过的车辆进行车速测试,测速仪一旦发现超速行驶车辆,将会自动拍摄违规车辆的图像,记录当时的时间及目标时速。它是一种新型交通管理执法工具,为治理违章超速行驶提供了可靠的技术取证手段。
激光干涉测速仪相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 激光微加工平台
- 激光成形专用机床
- 激光打印机实用维修技术
- 激光打印机硒鼓
- 激光打孔钻石
- 激光打标技术
- 激光打标机设备
- 激光晶体
- 激光机械一体机
- 激光测厚传感器
- 激光测宽仪
- 激光测径传感器
- 激光测速仪
- 激光照排机
- 激光照排
- 激光玻璃
- 中国电科闪烁及激光晶体项目在龙岩稀土工业园区开工
- 工艺参数对铝合金激光填丝搭接焊缝成形影响
- 关于GB/T7725增加变频空调技术指标建议
- 基于双芯光纤耦合器梳状滤波器及其CO2激光调节
- HDPE、MWCNT复合材料薄膜热导率的激光脉冲法研究
- JD—91型建设激光测量仪在锦华苑高层公寓施工中的应用
- 激光扫描数据的三维重建技术在水电工程中的应用研究
- 三维激光扫描技术在地质测绘和工程测量中的综合应用分析
- 三维激光扫描技术在建筑物外立面测量中的实践及应用
- TiNi形状记忆合金片激光微焊接接头的组织性能英文
- 二合一 柔性组合加工头使激光切割和激光焊接进行飞速更换
- 光纤尾纤激光二极管
- SAMSUNG CLP-326W彩色激光打印机
- 投标文件技术标九货物主要技术指标和性能详细说明
- 地面激光点云的建构筑物施工监测与质量检测技术综述
- 常规不锈钢带激光焊机技术协议
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
广东国咨招标有限公司
Excel 数据处理与分析应用大全
甘肃中泰博瑞工程项目管理咨询有限公司
拆边机
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
苏州弘创招投标代理有限公司