机电系统设计
《机电系统设计》是2011年机械工业出版社出版的图书,作者是赵先仲。
主要应用内容为数控机应酬、机器人、灌装机和三种微机检测系统,深浅适中,特别适合数控技术应用专业和机电一体代工作的技术人员的参考资料。
机电系统设计基本信息
| 书 名 | 机电系统设计 | 作 者 | 赵先仲 |
|---|---|---|---|
| 出版社 | 机械工业出版社 | 出版时间 | 2011年2月18日 |
| 定 价 | 18.00 | 开 本 | 16 开 |
| 装 帧 | 平 | ISBN | 7-111-14270-5 |
| 丛 书 | 普通高等教育规划教材 | ||
本书是为数控技术应用专业的机电系统设计课程编写的规划教材。从应用角度出发,介绍了机电一体化产品组成和原理,产品特点;主要零部件和元器件的原理、作用和选用;主要控制元件与控制电路的介绍、分析、选择;机电一体化产品应用实例等。书中内容新颖、符合专业应用要求。 全书共分8章,第1章介绍了机电一体化的概念和主要特征、机电一体化系统的组成、机电一体化系统的分类;第2章介绍了机电一体化系统总体设计;第3章介绍子机电一体化系统中的机械设计;第4章介绍了机电一体化系统常用传感器;第5章介绍了控制系统设计;第6章介绍了机电一体化系统控制;第7章介绍工业机器人技术;第8章介绍了机电一体化产品。
机电系统设计造价信息
目录
序
前言
第1章 概述
1.1 机电一体化的概念和主要特征
1.1.1 机电一体化的基本概念
1.1.2 机电一体化技术的主要特征
1.1.3 机电一体化的共性关键技术
1.2 机电一体化的共性关键技术
1.2.1 机电一体化的作用
1.2.2 机电一体化的目的
1.2.3 机电一体化的社会经济效益
1.3 机电一体化系统的组成
1.3.1 机电一体化系统的基本组成要素
1.3.2 机电一体化系统(产品)的功能构成
1.4 机电一体化系统的分类
1.4.1 按机电一体化产品的用途(服务领域)分类
1.4.2 按机电一体化产品的功能分类
1.4.3 按机电结合程度和形式分类
1.5 机电一体化的展望
1.5.1 机电一体化技术的发展战略1.5.2 机电一体发展趋势
习题与思考题
第2章 机电一体化系统总体设计
2.1 机电一体化系统的设计要点
2.1.1 机电一体化系统设计的考虑方法
2.1.2 机电一体化系统的设计类型
2.1.3 机电一体化总体设计的主要内容
2.2 机电一体化系统的设计过程
2.2.1 机电一体化产品基本开发工程路线
2.2.2 机电一体化系统设计工作流程
2.3 系统评价与系统决策
2.4 系统调试
2.4.1 硬件调试
2.4.2 软件调试
2.4.3 模拟调试
2.4.4 现场试运行
2.5 抗干扰设计
2.5.1 干扰源
2.5.2 抗干扰措施
习题与思考题
第3章 机电一体化系统中的机械设计
3.1 机械系统设计基础
3.1.1 精度和误差的概念
3.1.2 减少误差的方法
3.1.3 精度设计中的主要原则
3.2 传动系统设计
3.2.1 传动系统的作用
3.2.2 传动系统的性能要求
3.2.3 传动系统的类型
3.2.4 齿轮传动
3.2.5 同步带
3.2.6 滚珠丝杠副传动机构
3.2.7 其他机械传动
3.3 机械设计中的基本问题
3.3.1 材料选择
3.3.2 动平衡
3.4 机械系统结构特点
3.4.1 轴与支撑
3.4.2 轴上零件的固定
3.4.3 联轴器
3.4.4 制动器
3.5 滚动导轨
习题与思考题
第4章 机电一体化系统常用传感器
4.1 传感器概述
4.1.1 传感器的定义
4.1.2 传感器的组成
4.1.3 传感器的分类
4.2 位移传感器
4.2.1 光栅式传感器
4.2.2 编码器
4.2.3 磁栅
4.2.4 感应同步器
4.2.5 旋转变压器
4.3 速度传感器分类
4.3.1 速度传感器分类
4.3.2 机电一体化系统中常用的速度传感器
4.4 压力传感器
4.4.1 压力检测的方法
4.4.2 力检测的基本方法
4.4.3 常用的压力传感器和力传感器
4.5 温度传感器
4.5.1 测温传感器分类
4.5.2 一体化系统中常用的温度计
4.6 视觉、传感器
4.6.1 视觉传感器
4.6.2 听觉传感器
习题与思考题
第5章 控制系统设计
5.1 控制系统的组成及其作用
5.2 控制系统的设计要求
5.3 控制系统中的输入装置
5.3.1 通用键盘的使用
5.3.2 矩阵键盘的使用
5.4 控制系统中的信息显示
5.4.1 CRT显示
5.4.2 数码管显示
5.5 控制系统中的信息输入、输出
5.5.1 并行输入/输出
5.5.2 串行输入/输出
5.6 控制系统中的数据处理
5.6.1 数制的转换处理
5.6.2 数字滤波
习题与思考题
第6章 机电一体化系统控制
6.1 顺序控制
6.1.1 实现顺序控制的程序形式和工作方式
6.1.2 顺序控制的实现
6.2 时间控制
6.2.1 时间继电器
6.2.2 FX2系列PLC中的定时器
6.2.3 时间继电器控制线路
6.2.4 (FX2系列)PLC定时指令及编程方法
6.3 速度控制
6.3.1 直流伺服系统的调速
6.3.2 交流伺服电动机的调速
6.4 轨迹控制
6.4.1 脉冲增量插补原理
6.4.2 数据采样插补原理
习题与思考题
第7章 工业机器人技术
7.1 工业机器人分类
7.2 工业机器人中的传动
7.2.1 电力传动
7.2.2 机械传动
7.3 工来机器人的结构
7.3.1 机器人末端执行器
7.3.2 机器人手腕
7.3.3 机器人手臂
7.4 机器人的计算机控制系统
7.4.1 计算机控制系统软、硬件的任务分配
7.4.2 示教盒、操作盘
7.4.3 计算机控制系统软件结构
7.4.4 示教、编程与再现
7.5 工业机器人作业实施
7.6 机器人语言
7.6.1 机器人编程语言和基本要求
7.6.2 机器人操作语言介绍
习题与思考题
第8章 机电一体化产品实例
8.1 灌装封盖机械
8.1.1 曲型灌装封口机结构分析
8.1.2 控制部分
8.2 自动检测系统
8.2.1 概述
8.2.2 数控加工过程中的在线检测
8.2.3 智能型声发射刀具监控仪AEM-2000
8.2.4 花键分度误差自动检测装置
习题与思考题
附录
附录A 通用键盘布局和正常编码
附录B 与Shift、Ctrl组合的键盘编码
附录C 与Alt组合的键盘编码
参考文献 2100433B
机电一体化在大规模集成电路和微型计算机为代表的微电子技术高度发展、精密机械高速发展、机械与电子技术高度结合的现代工业基础上,综合应用机械技术、微电子技术、自动控制技术、信息技术、传感测试技术、电力电子技术、接口技术、信号变换技术以及软件编程技术等群体技术,从根本上改变了产品的结构,为人类带来了巨大的经济效益。 本书是为数控技术应用专业的机电系统设计课程编写的规划教材。从应用角度出发,介绍了机电一体化产品组成和原理,产品特点;主要零部件和元器件的原理、作用和选用;主要控制元件与控制电路的介绍、分析、选择;机电一体化产品应用实例等。书中内容新颖、符合专业应用要求。 主要应用内容为数控机床、机器人、灌装机和三种微机检测系统,深浅适中,特别适合数控技术应用专业和机电一体化专业的学生学习使用。本书也可作为从事计算机控制、机电一体化工作的技术人员的参考资料。 通过本书的学习,可以使学生在全面了解典型机电一体化产品的基础上,培养对一般机电一体化产品运行原理、故障等初步分析、判断的能力,提高初步的维护、维修能力,也为深入学习和从事机电一体化设计工作打下良好的基础。
机电系统设计常见问题
-
MATLAB系统分析与设计工具在基于传递函数的伺服控制系统设计与仿真、基于状态空间模型的控制系统设计、模糊控制系统设计及仿真的应用;基于dSPACE的半物理仿真及辨识试验方法。
-
还真不知道什么是预分支电缆,你就用YJV吧;225A用120电缆,其载流量为359A;辐射方式是埋地穿导管,另外你设计的应该是公共用电吧,居民用电有的设计院也出,你要是设计的居民用电电缆你选YJV22...
-
多的去了,找个设计院的图纸,看看里面人家写的哪些的设计依据你就知道了。比如:《住宅小区安全技术防范系统要求》DB31/294-2003《智能建筑设计标准》GB/T 50314-2006《智能建筑工程质...
机电系统设计文献

 机电系统设计概述
机电系统设计概述
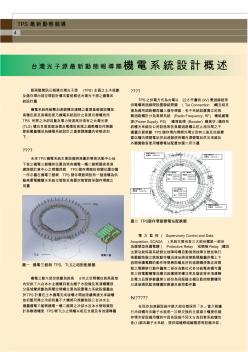
硩兩螯簡訊已報導台灣光子源 (TPS) 全區之土木規劃 及儲存環內部空間設計蠣本螯將概述台灣光子源之機電系 統設計蠤 機電系統係維繫加速器穩定運轉之重要基礎建設蠣故 高穩定度及高精密度乃機電系統設計之首要目標蠣然而 TPS 所需之冷卻容量及電力皆遠高於現有之台灣光源 (TLS) 蠣且目硩面臨油價及電價皆高漲之趨勢蠣如何兼顧 節能餥量蠣成為機電系統設計之重要課題蠤內容略述如 下: ???? 未來 TPS機電系統主要設備將規劃於學術活動中心地 下室之機電三館蠣其位置為現有機電一蠖二館螟國家高速 網路螟計算中心之間蠣其螟 TPS儲存環館的相關位置如圖 一所示蠤在機電三館螟 TPS儲存環館間設有一隧道蠣為供 輸高壓電纜蠖水系統主管路及高壓空氣管路至儲存環館之 用蠤 機電三館大部份規劃為挑高 8米之空間蠣在挑高區域 內安排了六台冰水主機蠖四套去離子水設備及泵浦蠣蠪部 分區域輦規劃為兩層空間蠣主要為設
 住宅机电系统设计管控要点
住宅机电系统设计管控要点
住宅机电系统设计管控要点 本标准为绿城房地产集团机电专业设计人员提供参考 和借鉴,亦可作为项目公司安装工程管理人员的工作指引。 图纸完整性要求住宅机电系统设计应严格遵循国家、行业及 地方的政策法规、标准规范及相关规定,设计成果文件应达 到国家建设部《建筑工程设计文件编制深度规定》 (2008 版) 的深度要求。设计成果文件应包括设计说明、平面图、系统 图、机房大样图、机电安装详图等,应做到内容完整,表达 清晰,便于施工。对所采用的标准图应注明标准图号和名称。 所有预埋件和预留孔均应标注定位尺寸、标高,明确做法详 图。毛坯房应绘制、安装详图,精装修房除绘制上述图纸外 还应绘制户型大样图、 厨房、卫生间大样图、 机房大样图等, 各专业设备、设备接口、阀门、定位尺寸、标高标注应齐全 准确。设计阶段应充分考虑设备安装的空间与环境,其平面 位置、安装尺寸、 检修通道须满足设备的吊装、 搬运、安装、
机电系统设计方法、模型及概念: 建模、仿真及实现基础》(原书第1~5章,以下简称“建模与仿真篇”)和《机电系统设计方法、模型及概念: 实现、控制及分析》(原书第6~12章和附录,以下简称“控制与分析篇”)。译者认为,这是关于机电系统设计和分析的一本不可多得的权威著作,有很高的学术水准,内容全面丰富。书中不少内容基于作者研究组的最新研究成果,有很强的创新。例如,基于通用机电变送器建模(建模与仿真篇第5章),给出了静电(控制与分析篇第6章)、压电(控制与分析篇第7章)、电磁以及电动力变送器(控制与分析篇第8章)的形式化描述。建模与仿真篇第5章介绍的通用机电变送器模型框架为一般了解电力耦合变送器的原理以及不同类型变送器物理原理的表示提供了方法论 。
天津市先进机电系统设计与智能控制重点实验室现有科研人员54人(教授19人,副教授13人,讲师19人),其中天津特聘讲座教授1人,天津市"131"创新型人才培养工程第二层次人选3人,第三层次人选13人,具备博士学位者43人,占到学术队伍的80%,科研实力雄厚。
天津市先进机电系统设计与智能控制重点实验室的主要研究方向:
一、机器人机构学与控制
本方向主要研究带柔性铰链的微纳米级操作机器人理论与关键技术、并联机器人理论与关键技术、移动机器人控制与制导、多传感器融合技术以及基于网络的遥操作等。近几年,本方向申报并获批了多项国家自然科学基金及省部级科研基金,形成了坚实的后备科研梯队。在国家基金委和天津市教委资助下,本团队成员先后出访美国、法国、德国、英国、澳大利亚等发达国家,与美国、英国、澳大利亚、日本等多所国际著名大学和研究单位开展合作研究。经过多年的人才培养与引进,极大地促进和提升了本团队的科研实力和水平,在微纳操作机器人等方面的研究已经达到了国际水平。目前学术梯队更趋合理,在微纳米操作机器人、并联与移动机器人、机器人机构学理论研究与工程应用等方面形成了突出的科研优势。
二、仿生设计理论与制造
本方向研究包括面向设计的仿生、面向制造的仿生和面向控制的仿生,探索仿生制造系统的自组织控制机制与方法,有选择性的在设计、制造及控制过程中应用这些原理和特征。制造技术与生物技术密切结合产生了仿生制造技术、生物反应器、单分子技术平台,催生了大量的新产品和新产业,成为先进制造技术领域的一个重要组成部分和前沿方向,在医疗与健康、节能与环保等领域具有广阔应用前景,目前实验室具有自主研发的以直线电机为基础的组合式多功能生物反应器;音圈电机为动力的仿生双频载荷的组织工程装置;以有限元为基础的仿生设计技术;正在开发的多种单分子技术平台,包括激光光镊、生物膜力探针和单分子荧光成像平台;实验室配备有设计、制造相关的众多检测仪器,设备与仪器总价值270万元,具备了良好的科研条件。
三、机电液一体化装备集成
本方向紧密围绕机电液一体化装备集成的共性技术进行相关的理论研究与应用开发,将机械技术、微电子技术、信息技术、控制技术等在系统工程基础上的有机综合,以实现整个系统的最优化,在关键零部件研究与系统开发方面形成了一个科研氛围浓厚、创新能力突出的研究团队。目前本研究方向在港口及海洋工程的物理模拟实验研究领域、钢管在线高速精确切割技术、液压机生产的高效和节能技术以及精密机械控制技术方面形成了“企业需求带动、理论研究驱动、校企合作联动”的科研特色,既做到了高校科研的“顶天立地”,突出了理论研究的深度与广度,又切实做到产学研结合,在引导行业技术创新、推动产学研相结合方面发挥着重要作用。经过近几年的高速发展,本方向在机电液一体化装备集成的共性技术研究方面积累了丰富的理论研究基础和应用开发经验。
天津市先进机电系统设计与智能控制重点实验室先后承担国家重点研发计划项目、国家基金项目、天津市科委重点项目等90余项,企业项目80余项,累计实到科研经费7500余万元,发表论文500余篇,被SCI、EI检索163篇,获得天津市科学技术进步奖等省部级奖5项,软件著作权和发明专利34项。实验室承办了图像与信号处理国际会议(2008 International Congress on Image and Signal Processing(CISP 2008))及生物医学工程与信息国际会议(2008 International Conference on Biomedical Engineering and Informatics(BMEI 2008)两项国际会议,主办了第124届模糊科学研讨会等4次学术交流会议,并参加了多次国内外学术会议。与美国、日本等多个国家的大学和研究机构建立了稳定的合作研究关系,进行过多次人员互访和学术交流。 2100433B
译者引言(第1~5章简介)
第6章功能实现:静电变送器
6.1系统工程背景
6.2物理基础
6.3通用静电变送器
6.3.1系统结构
6.3.2静电变送器本构方程
6.3.3ELM二端口模型
6.3.4负载静电变送器
6.3.5结构原理
6.4具有电压驱动与可变电极间距的变送器
6.4.1一般动态模型
6.4.2使用串联电容增大运动范围
6.4.3使用串联电阻的被动阻尼
6.5具有可变电极间距和电流驱动的变送器
6.6差动变送器
6.6.1通用变送器配置
6.6.2推推控制:机械对称结构
6.6.3推推控制:横向梳形变送器
6.6.4推挽控制:静电轴承
6.6.5推挽控制:轴对称双梳变送器
6.7具有恒定电极间距的变送器
6.7.1一般动态模型
6.7.2纵向梳形变送器
6.7.3采用线性级齿的梳形变送器
本章参考书目
第7章功能实现:压电变送器
7.1系统工程背景
7.2物理基础
7.3通用压电变送器
7.3.1系统结构
7.3.2压电变送器的本构方程
7.3.3ELM二端口模型
7.3.4负载压电变送器
7.3.5结构原理
7.4带阻抗反馈的变送器
7.5机械谐振器
7.5.1比例工作和谐振工作
7.5.2超声压电电机
本章参考书目
第8章功能实现:电磁作用变送器
8.1系统工程背景
8.2物理基础
8.3通用电磁变送器:可变磁阻
8.3.1系统结构
8.3.2电磁变送器的本构方程
8.3.3ELM二端口模型
8.3.4负载电磁变送器
8.3.5结构原理
8.3.6具有可变工作气隙的电磁变送器
8.3.7差动电磁变送器:磁轴承
8.3.8具有恒定工作气隙的电磁变送器
8.3.9磁阻步进电机
8.4通用电动力变送器:洛伦兹力
8.4.1系统配置
8.4.2电动力变送器的本构方程
8.4.3ELM二端口模型
8.4.4负载电动力变送器
8.4.5结构原理
本章参考书目
第9章功能实现:数字信息处理
9.1系统工程背景
9.2定义
9.2.1参考结构
9.2.2建模方法
9.3采样
9.4混叠
9.5保持器
9.6采样对象的频率响应
9.7振荡系统中的混叠
9.8数字控制器
9.9变换频域
9.10信号转换
9.11数字数据通信
9.12实时性
9.13设计时要考虑的问题
本章参考书目
第10章控制理论
10.1系统工程背景
10.2一般的设计考虑
10.3建模不确定性
10.3.1多体系统参数不确定性
10.3.2未建模的本征模态
10.3.3寄生动态
10.4多体系统的鲁棒稳定性
10.4.1穿越(或相交)形式的奈奎斯特判据
10.4.2使用尼柯尔斯图的稳定性分析
10.4.3弹性本征模的鲁棒稳定性
10.5频域控制器的手工设计
10.5.1鲁棒控制策略
10.5.2多体系统的通用控制器类型
10.5.3单位反馈下的暂态特性
10.5.4单质振子的控制
10.5.5同位MBS控制
10.5.6非同位MBS控制
10.6隔振
10.6.1被动隔振
10.6.2主动隔振:天钩原理
10.6.3主动检测质量阻尼器
10.7可观性与可控性
10.7.1一般性质
10.7.2相对坐标下的MBS控制
10.7.3振荡节点处的测量与执行位置
10.8数字控制
10.8.1一般设计过程
10.8.2刚体主导的系统
10.8.3具有未建模本征模的系统
11.8.4数字控制器中的混叠
10.8.5测量噪声的混叠
本章参考文献
第11章随机动态分析
11.1系统工程背景
11.2随机系统理论基础
11.2.1随机变量
11.2.2随机时间函数与随机过程
11.2.3具有随机输入的LTI系统
11.3白噪声
11.4色噪声
11.5噪声源的建模
11.6协方差分析
本章参考书目
第12章设计评价:系统预算
12.1系统工程背景
12.2性能度量参数
12.3度量的线性预算
12.4度量的非线性预算
12.5产品精度
12.6非纯一度量的预算编制
12.7使用预算的设计优化
12.8设计示例 2100433B
机电系统设计相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 机电系统集成技术
- 机电系统PLC控制技术
- 机电维修技术实训
- 机电综合实训
- 机电综合实践
- 机电综合实验教程
- 机电综合工程训练中心
- 机电综合设计指导
- 机电联合式动力装置
- 机电英语(第二版)
- 《机电英语》2009版图书
- 机电英语
- 《机电英语》
- 《机电英语》2009年出版图书
- 机电行业英语
- 机电装备设计
- 张潘明污水处理厂初步设计说明书(水质工程学课程)
- 云南洱海桃溪河口净化工程的设计思路及初步净化效果
- 增设钢牛腿在连续独柱墩桥梁抗倾覆加固设计中的应用
- 智能建筑火灾自动报警与消防联动系统设计及应用效果
- 余杭某供电营业所生产营业用房工程建筑设计招标文件
- 中国建筑抗震设计规范的演变与展望
- 中国恩菲工程技术有限公司中国有色工程设计总院
- 有线电视广播系统运行维护规程编制情况和宣贯要点
- 在项目成本控制中的实践与探索工程项目成本管理系统
- 园林景观及配套设施标工程施工组织设计建筑施工
- 再谈VRV空调系统设计与施工中有关问题的解决方法
- 有关CAD技术在水利工程设计中的实际应用方法
- 中国电工技术学会电力系统控制与保护专业委员会成立
- 用于制冷系统稳定运行时制冷剂分布测试的新方法
- 中、小跨径钢筋混凝土拱桥现浇支架(拱架)设计指南
- 中国国家博物馆改扩建设计回顾及学术研讨会
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
广东国咨招标有限公司
Excel 数据处理与分析应用大全
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
拆边机
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
苏州弘创招投标代理有限公司