海洋测量方法
海洋测量方法:充分利用声、光、电原理,海洋声学是研究声波在海洋水层、沉积层和海底岩层中的传播规律,及在海洋探测和海洋开发中的应用的学科;海洋光学的研究内容,在基础研究方面主要是海洋辐射传递过程的研究,以及海面光辐射、水中能见度、海水光学传递函数、激光与海水相互作用等研究;在应用研究方面主要是遥感、激光、水中照相工程等海洋探测方法和技术的研究;海洋电磁学主要研究海洋的电磁特性,海洋中的天然电磁场和电磁波的运动形态及传播规律,电磁彼在海洋探测和通信及海洋开发中的应用。
海洋测量方法基本信息
| 中文名 | 海洋测量方法 | 原 理 | 声、光、电原理 |
|---|---|---|---|
| 应 用 | 遥感激光水中照相工程等海洋探测 | 分 类 | 声纳测量,光学测量,电学测量 |
1947~1948年,瑞典科学家在环球深海调查中(“信天翁”号),首次将海洋光学调查列入重要的海洋调查计划,测量了辐照度、衰减和散射等。
海洋测量方法造价信息
M.法拉第早在1832年就指出:在地磁场中流动的海水,就像在磁场中运动的金属导体一样,也会产生感应电动势。他在泰晤士河做过实验,得不到预期的结果;但他指出,在英吉利海峡必定能测出。直到1851年,C.渥拉斯顿在横过英吉利海峡的海底电缆上检测到和海水潮汐周期相同的电位变化时,才证实了法拉第的预言。2100433B
声纳技术至今已有超过100年历史,它是1906年由英国海军的李维斯·理察森所发明。他发明的第一部声纳仪是一种被动式的聆听装置,主要用来侦测冰山。这种技术,到第一次世界大战时开始被应用到战场上,用来侦测潜藏在水底的潜水艇,这些声呐只能被动听音,属于被动声呐,或者叫做“水听器”。
海洋测量方法常见问题
-
橱柜的测量是非常重要的,因为这个设计到你这个空间的尺寸大小的,如果你的测量不准确,那么就会影响到布局的; 第一:初量,就是橱房装修前的测量,这次去主要是看橱房的结构,再根据客户所需电器来标注电源插头、...
-
手镯测量方法1: 在测量时,将 4 个长手指(大拇指除外)并至“虎口”处,用力捏紧一些,然后测量工具测量,例如刚好是 45 &n...
-
可以直接在洛氏硬度计上测试,硬度计上有配V型试台,把工件放在V型试台上直接测试,不过按国家标准说明,测试面不是平面要进行修正,根据测试的是D16和材料硬度25-30HRC,修正值是1,圆柱面是凸的,与...
海洋测量方法文献

 GPS测量方法
GPS测量方法
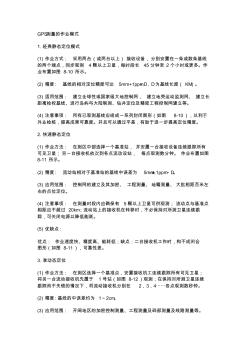
GPS测量的作业模式 1.经典静态定位模式 (1) 作业方式 : 采用两台(或两台以上) 接收设备,分别安置在一条或数条基线 的两个端点,同步观测 4颗以上卫星,每时段长 45分钟至 2个小时或更多。作 业布置如图 8-10 所示。 (2) 精度 : 基线的相对定位精度可达 5mm+1ppm·D,D为基线长度( KM)。 (3) 适用范围 : 建立全球性或国家级大地控制网, 建立地壳运动监测网、 建立长 距离检校基线、进行岛屿与大陆联测、钻井定位及精密工程控制网建立等。 (4) 注意事项 : 所有已观测基线应组成一系列封闭图形(如图 8-10),以利于 外业检核,提高成果可靠度。并且可以通过平差,有助于进一步提高定位精度。 2.快速静态定位 (1) 作业方法 : 在测区中部选择一个基准站, 并安置一台接收设备连续跟踪所有 可见卫星;另一台接收机依次到各点流动设站, 每点观测数分钟
 道路测量方法
道路测量方法
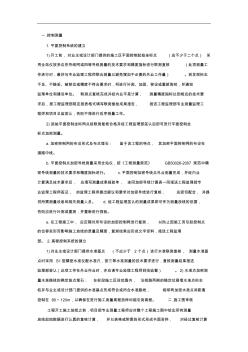
一 .控制测量 1. 平面控制系统的建立 1) 开工前, 对业主或设计部门提供的施工区平面控制起始坐标点 (应不少于二个点) 采 用全站仪按多边形导线网或四等导线测量的技术要求和精度指标进行联测复核 (此项测量工 作进行时,最好与专业监理工程师联合测量以避免增加不必要的外业工作量) 。若发现标志 不足、不稳妥、被移位或精度不符合要求时,将进行补测、加固、移设或重新测校,并通知 监理单位和建设单位。 联测点复核完成并经内业平差计算, 测量精度指标达到相应的技术要 求后,按工程监理部规定报表格式填写联测复检成果报告, 报送工程监理部专业测量监理工 程师和项目总监签认,否则不得进行后序测量工作。 2) 起始平面控制坐标网点经联测复核合格并经工程监理部签认后即可进行平面控制坐 标点加密测量。 a. 加密控制网的布设形式及布点埋石: 鉴于该工程的特点, 其加密平面控制网的布设在 道路中线。 b. 平
随着航天和航空遥感技术的发展,航天和航空遥感技术逐渐应用于海洋探测,形成天基海洋环境遥感。天基海洋遥感具有观测范围广、重复周期短、时空分辨率高等特点,可以在较短时间内对全球海洋成像,可以观测船舶不易到达的海域,可以观测普通方法不易测量或不可观测的参量,成为继地面和海面观测的第二大海洋观探测平台,也成为发达国家竭力争夺的海洋高科技之一。近年来,美国、欧洲、日本等航天大国相继制定了相应的海洋发展规划。
海洋观测技术卫星遥感观测
国外已经陆续发射了多颗海洋水色卫星、海洋地形卫星和海洋动力环境卫星。
1)SeaStar卫星
1997年8月,美国发射了SeaStar海洋水色卫星。星上装载有第二代海洋水色传感器,共有8个通道,前6个通道位于可见光范围,7、8通道位于近红外,中心波长分别为765nm和865nm;地面分辨率为1.1km,该卫星现仍在运行。
2)EOS卫星系列
EOS系列中的EOS-AM卫星主要用于陆地和大气观测、物理和化学、气候环境调查。第一颗EOS-AM卫星Terra于1999年12月18日发射。EOS-AM1卫星装载五个主要仪器:中分辨率成像光谱仪(MODIS-N)、先进星载热发射和反射辐射器(ASTER)、多角度成像光谱仪(MI-SR)、云和地球辐射能量系统(CERES)和对流层污染仪(MOPITT)。EOS-PM卫星共计三颗,第一颗EOS-PM卫星Aqua于2002年5月4日发射;EOS-PM2卫星Aura于2004年7月15发射;EOS-PM3于2010年12月发射。
EOS-PM卫星装载的仪器有:先进的微波探测器(AMSU)、微波湿度探测器(MHS)、云和地球辐射能量系统(CERES)、中分辨率成像光谱仪(MODIS-N)、大气红外探测器(AIRS)、多通道微波成像辐射器(MIMR)。
3)Geosat卫星
1985年3月,美国海军发射了Geosat大地测量卫星,也是一颗海洋地形卫星,星上装载的唯一传感器是一部Ku波段(13.5GHz)的雷达高度计。该卫星以军用为主,用于测量海洋表面有效波高,研究地球重力场、海潮和海面地形等,鉴于卫星轨道误差大(50cm)和数据保密等原因,没有得到广泛应用。1998年2月,美国海军又发射了Geosat的后继卫星GFO-1,运行至今。
海洋观测技术航空海洋观测
航空海洋探测采用固定翼飞机和无人机为传感器载体,具有机动灵活、探测项目多、接近海面、分辨率高、不受轨道限制、易于海空配合而且投资少等特点,是海洋环境监测的重要遥感平台,通过搭载的微波和光学遥测设备,能够实时获取大气海洋环境资料。在军事上,由于无人机可有效减少人员伤亡,得到了广泛应用。典型代表有美国的“全球鹰”、“捕食者”,澳大利亚的Aerosonde等无人机。
1.根据测量条件分为
(1)等精度测量:用相同仪表与测量方法对同一被测量进行多次重复测量
(2)不等精度测量:用不同精度的仪表或不同的测量方法, 或在环境条件相差很大时对同一被测量进行多次重复测量
2.根据被测量变化的快慢分为
(1)静态测量
(2)动态测量
1.直接测量法:不必测量与被测量有函数关系的其他量,而能直接得到被测量值的测量方法。
2.间接测量法:通过测量与被测量有函数关系的其他量来得到被测量值的测量方法。
3.定义测量法:根据量的定义来确定该量的测量方法。
4.静态测量方法:确定可以认为不随时间变化的量值的测量方法。
5.动态测量方法:确定随时间变化量值的瞬间量值的测定方法。
6.直接比较测量法:将被测量直接与已知其值的同种量相比较的测量方法。
7.微差测量法:将被测量与只有微小差别的已知同等量相比较,通过测量这两个量值间的差值来确定被测量值的测量方法。
测量统计处理
(1)正态分布
随机误差具有以下特征:
① 绝对值相等的正误差与负误差出现的次数大致相等——对称性;
② 在一定测量条件下的有限测量值中,其随机误差的绝对值不会超过一定的界限——有界性;
③ 绝对值小的误差出现的次数比绝对值大的误差出现的次数多——单峰性;
④对同一量值进行多次测量,其误差的算术平均值随着测量次数n的增加趋向于零——抵偿性。(凡是具有抵偿性的误差原则上可以按随机误差来处理);
这种误差的特征符合正态分布
(2)随机误差的数字特征:如图所示:
(3)用测量的均值代替真值;
(4)有限次测量中,算术平均值不可能等于真值;
(5)正态分布随机误差的概率计算
当k=±1时, Pa=0.6827, 即测量结果中随机误差出现在-σ~ σ范围内的概率为68.27%, 而|v|>σ的概率为31.73%。出现在-3σ~ 3σ范围内的概率是99.73%, 因此可以认为绝对值大于3σ的误差是不可能出现的, 通常把这个误差称为极限误差。
|
|
|
例题:见图所示:
(6)不等精度直接测量的权与误差
1.在不等精度测量时, 对同一被测量进行m组测量, 得到m组测量列(进行多次测量的一组数据称为一测量列)的测量结果及其误差, 它们不能同等看待。精度高的测量列具有较高的可靠性, 将这种可靠性的大小称为“权”。
2.“权”可理解为各组测量结果相对的可信赖程度。 测量次数多, 测量方法完善, 测量仪表精度高, 测量的环境条件好, 测量人员的水平高, 则测量结果可靠, 其权也大。权是相比较而存在的。 权用符号p表示, 有两种计算方法: "para" label-module="para">
① 用各组测量列的测量次数n的比值表示, 并取测量次数较小的测量列的权为1,则有
p1∶p2∶…∶pm=n1∶n2∶…∶nm
② 用各组测量列的误差平方的倒数的比值表示, 并取误差较大的测量列的权为1, 则有
p1∶p2∶…∶pm=(1/σ1)^2:(1/σ2)^2:(1/σ3)^2:……(1/σm)^2
|
|
|
测量通用处理
(1)系统误差产生的原因
①传感器、仪表不准确(刻度不准、放大关系不准确)
②测量方法不完善(如仪表内阻未考虑)
③安装不当
④环境不合
⑤操作不当;
(2)系统误差的判别
①实验对比法,例如一台测量仪表本身存在固定的系统误差,即使进行多次测量也不能发现,只有用更高一级精度的测量仪表测量时,才能发现这台测量仪表的系统误差;
②残余误差观察法(绘出先后次序排列的残差);
③准则检验法
马利科夫判据是将残余误差前后各半分两组, 若“Σvi前”与“Σvi后”之差明显不为零, 则可能含有线性系统误差。
阿贝检验法则检查残余误差是否偏离正态分布, 若偏离, 则可能存在变化的系统误差。将测量值的残余误差按测量顺序排列,且设A=v12 v22 … vn2, B=(v1-v2)2 (v2-v3)2"para" label-module="para">
若|B/2A-1|>1/n^1/2,则可能含有变化的系统误差。
(3)系统误差的消除
在测量结果中进行修正 已知系统误差, 变值系统误差, 未知系统误差
消除系统误差的根源 根源
在测量系统中采用补偿措施
实时反馈修正
测量粗大误差
剔除坏值的几条原则:
(1)3σ准则(莱以达准则):如果一组测量数据中某个测量值的残余误差的绝对值|vi|>3σ时, 则该测量值为可疑值(坏值), 应剔除。
(2)肖维勒准则:假设多次重复测量所得n个测量值中, 某个测量值的残余误差|vi|>Zcσ,则剔除此数据。实用中Zc<3, 所以在一定程度上弥补了3σ准则的不足。
(3)格拉布斯准则:某个测量值的残余误差的绝对值|vi|>Gσ, 则判断此值中含有粗大误差, 应予剔除。 G值与重复测量次数n和置信概率Pa有关。
解题步骤:如图所示:
测量几个问题
(1)误差的合成:如图所示:
绝对误差的合成(例题):
用手动平衡电桥测量电阻RX。已知R1=100Ω, R2=1000Ω, RN=100Ω,各桥臂电阻的恒值系统误差分别为ΔR1=0.1Ω, ΔR2=0.5Ω, ΔRN=0.1Ω。求消除恒值系统误差后的RX.
(2)最小二乘法的应用:
推导过程,如图册所示:
最小二乘法应用例子:如图册所示:
5.用经验公式拟合实验数据——回归分析
用经验公式拟合实验数据,工程上把这种方法称为回归分析。回归分析就是应用数理统计的方法,对实验数据进行分析和处理,从而得出反映变量间相互关系的经验公式,也称回归方程。
|

山东青岛打造国际海洋名城。资料图 钟欣 摄
中新网烟台6月6日电 题:
山东做好经略海洋大文章 建设海洋强省
作者 王娇妮
海洋科技创新、海洋生态环境保护、世界一流港口建设、海洋新兴产业壮大……拥有全国六分之一海岸线、海洋资源丰度指数全国第一的山东省正发力做好经略海洋大文章,建设中国海洋强省。
|

山东烟台近年来在海工装备等产业实现了突破式发展。(资料图) 钟欣 摄
今年5月,《山东海洋强省建设行动方案》印发实施,推出海洋发展“十大行动”,提出一批含金量高的政策措施,力争到2035年基本建成与海洋强国战略相适应,海洋经济发达、海洋科技领先、海洋生态优良、海洋文化先进、海洋治理高效的海洋强省。
提及山东的海洋科技实力,首先提到青岛。一组数据颇具说服力:青岛聚集了全国30%的涉海院士、40%的涉海高端研发平台、50%的海洋领域国际领跑技术。
|

“蛟龙”“海龙”“潜龙”“大洋一号”等中国海洋科技名片近年来纷纷从青岛发出,名扬世界。
青岛港还建成了亚洲首个全自动化集装箱码头,实现了吊装、运输等作业全过程的无人化。过去五年,青岛海洋经济一直保持年均16%的增长速度,2017年该市海洋生产总值达2909亿元(人民币,下同)。
|

根据“行动方案”,山东将提升青岛在重大海洋科技创新、海洋战略性新兴产业发展等方面的辐射带动作用,加快建设国际先进的海洋创新中心、海洋发展中心和具有全球影响力的国际海洋名城。
山东另一座重要港口城市烟台近年来在海工装备等产业实现了突破式发展。累计有十余座身披五星红旗的深水半潜式钻井平台和十余座自升式钻井平台从烟台中集来福士船厂驶出,奔赴挪威北海、墨西哥湾、巴伦支海等海上油田作业。其中超深水双钻塔半潜式钻井平台“蓝鲸1号”钻井深度超过15000米,去年完成了中国第一次海底可燃冰的开采。
|

山东“下大气力保护好海洋”,着力推动海洋开发向循环利用型转变。(资料图) 蔡红文 摄
目前烟台已成为中国最大的海上深水油气平台建造基地,国内交付的半潜式钻井平台八成出自这里,海工装备核心部件国产化率从10%提升到60%。
中国渔业大市山东威海正积极探索海洋经济转型,推进渔业资源开发由近岸浅海向深海远洋拓展,发展远洋渔业等。威海专业远洋渔船总体规模占山东省80%,作业区域包括太平洋、大西洋、印度洋公海等海域。
|

“水清、岸绿、滩净、湾美、岛丽”的海洋生态文明格局在山东加速形成。(资料图) 蔡红文 摄
据悉,在发展海洋经济的同时,山东还“下大气力保护好海洋”,着力推动海洋开发向循环利用型转变,并围绕海洋生态保护修复,争取各类资金实施海洋环境保护重大工程,“水清、岸绿、滩净、湾美、岛丽”的海洋生态文明新格局加速形成。
预计到2022年,山东重要海洋功能区水质达标率超过90%,自然岸线保有率不低于40%。
山东海域面积近16万平方公里、港口年吞吐量超过15亿吨。2017年山东省海洋生产总值达1.4万亿元,同比增长8%,约占该省GDP19.9%。
海洋测量方法相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 海洋浮体水动力学与运动性能
- 海洋温差发电
- 海洋湖沼环境污染学术讨论会论文集
- 海洋潮汐
- 海洋王照明科技股份有限公司东莞技研生产中心
- 海洋王防爆科技股份有限公司
- 海洋白
- 海洋石油平台易熔塞布置设计要求
- 海洋石油平台电气设备防护、防爆等级要求
- 海洋蓝
- 海洋重金属污染
- 海洋隔水管用直缝埋弧焊管
- 海洛斯空调
- 海派风格
- 海润光伏电力发展有限公司
- 海润光伏科技股份有限公司
- 中厚板生产线升级改造设备中心线基准的测量方法
- 中国船舶与海洋工程设计院喷水推进工程中心
- 中国海洋石油公司之CNG加气站管理制度及操作规程
- 基于图像处理的通信铁塔和建筑物高度测量方法
- 海洋石油工程造价的控制
- 基于模糊评价理论海洋工程采办过程风险分析方法
- 基于最小二乘法地铁盾构隧道结构横断面测量方法
- 中国海洋石油总公司工程建设常用标准目录
- 建筑信息模型BIM在海洋工程结构设计中的应用研究
- 全国精密测量方法和技术在工程建设中应用学术研讨会召开
- 三峡升船机齿条和螺母柱一期埋件PVC套管安装测量方法
- 全面预算系统在海洋石油工程公司财务管理中的应用与分析
- 海洋成图软件在港口与航道工程施工监理中的应用
- 动力定位海洋工程项目应急切断系统的安全性分析及设计改进
- 中国海洋大学教学大纲港口航道与海岸工程河流动力学
- 中国海洋大学教学大纲港口航道与海岸工程水工钢结构
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
拆边机
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司