混合式步进电机
混合式步进电机是综合了永磁式和反应式的优点而设计的步进电机。它又分为两相、三相和五相,两相步进角一般为1.8度 ,三相步进角 一 般为 1.2度 ,而五相步进角 一 般为0.72度。
混合式步进电机的转子本身具有磁性,因此在同样的定子电流下产生的转矩要大于反应式步进电机,且其步距角通常也较小,因此,经济型数控机床一般需用混合式步进电机驱动。但混合转子的结构较复杂、转子惯量大,其快速性要低于反应式步进电机。

混合式步进电机基本信息
| 中文名 | 混合式步进电机 | 外文名 | Hybrid stepping motor |
|---|---|---|---|
| 别 名 | 永磁反应式步进电机 | 优 点 | 步进角度小、精度高 |
| 分 类 | 两相、三相和五相 | 学 科 | 电机工程 |
混合式步进电机的结构与反应式步进电机不同,反应式步进电机的定子与转子均为一体结构,而混合式电机的定子与转子都被分为下图所示的两段,极面上同样都分布有小齿。
定子的两段齿槽不错位,上面布置有绕组。上所示为两相4对极电机,其中的l、3、5、7为A相绕组磁极,2、4、6、8为B相绕组磁极。每相的相邻磁极绕组绕向相反,以产生图5-1.5中x、y向视图中所示的闭合磁路。
B相与A相的情况类似。转子的两段齿槽相互错开半个齿距(见图5-1.5),中间用环形永久磁钢连接,两段转子的齿的磁极相反。根据反应式电机同样的原理,电机只要按照A—B—A—B—A或A—B—A—B—A的顺序通电,步进电机就能逆时针或顺时针连续旋转。
显然,同一段转子片上的所有齿都具有相同极性,而两块不同段的转子片的极性相反。混合式步进电机与反应式步进电机的最大区别在于当磁化的永久磁性材料退磁后,则会有振荡点和失步区。
混合式步进电机的转子本身具有磁性,因此在同样的定子电流下产生的转矩要大于反应式步进电机,且其步距角通常也较小,因此,经济型数控机床一般需要用混合式步进电机驱动。但混合转子的结构较复杂、转子惯量大,其快速性要低于反应式步进电机。
混合式步进电机造价信息
国内生产步进电机的厂 家很多,其工作原理是是一样的,下面以国产某两相混合式步进电机42B Y G2 50C 及其驱动器SH20403为例介绍混合式步进电机的结构和驱动方法。
两相混合步进电机结构
工业控制中采用如图1所示的定子磁极上带有小齿,转子齿数很多的结构,其步距角可以做得很小。如图1两
相混合式步进电动机的结构图,和图2步进电机绕组接线图,A、B两相绕组沿径向分相,沿着定子圆周有8个凸出的磁极,1、3、5、7磁极属于A相绕组,2、4、6、8磁极属于B相绕组,定子每个极面上有5个齿,极身上有控制绕组。转子由环形磁钢和两段铁芯组成,环形磁钢在转子中部,轴向充磁,两段铁芯分别装在磁钢的两端,使得转子轴向分为两个磁极。转子铁芯上均匀分布50个齿,两段铁芯上的小齿相互错开半个齿距,定转子的齿距和齿宽相同。
两相混合式步进电机的工作过程
当两相控制绕组按
A相通电转子 N极端定转子平衡图。由于两段转子铁芯上的小齿相互错开半个齿距,在转子S极端, 磁极1’和5’产生的S极磁场,排斥转子S极,与转子正好是齿对槽,磁极3’和7’齿面产生N极磁场,吸引转子 S极,使得齿对齿。A相绕组通电时转子N极端、S极端转子平衡图如图3。
因转子上共有50个齿,其齿距角为360° /50=7.2°,定子每个极距所占的齿数为不是整数,因此当定子的A相通电,在转子N极,磁极1的5个齿与转子齿对齿,旁边的B相绕组的磁极2的5个齿和转子齿有1/4齿距的错位,即 1.8°,如图4所示 A相通电时定转子齿展开图画圆圈的地方,A相磁极3的齿和转子就会错位 3.6°,实现齿对槽了。磁力线是沿转子N端→A(1)S磁极→导磁环→A(3’)N磁极→转子S端→转子N端,成一闭合曲线 。当A相断电B相通电时,磁极2产生N极性,吸合离它最近的S极转子7齿,使得转子沿顺时针方向转过1.8°,实现磁极2和转子齿对齿,B相绕组通电定转子齿展开图如图5所示,此时磁极3和转子齿有1/4齿距的错位。
依次类推若继续按四拍的顺序通电,转子就按顺时针方向一步一步地转动,每通电一次即每来一个脉冲转子转过1.8°,即称步距角为1.8°,转子转过一圈需要360°/1.8°=200个脉冲(见图4、图5)。
在转子S极端也是同样道理,当绕组齿对齿时,其旁边一相磁极错位1.8°。3 步进电机驱动器步进电机必须有驱动器和控制器才能正常工作。驱动器的作用是对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电,控制电机转动。步进电机 42BYG250C的驱动器为SH20403。为10V~40V直流供电, A 、A-、B 、B-端 子要连接步进电机的四条引线,DC 、DC-端子接驱动器工作直流电源,输入接口电路包括公共端(接输入端子电源正极)、脉冲信号输入端(输入一系列脉冲,内部分配以驱动步进电机A、B相)、方向信号输入端(可实现步进电机的正、反转)、脱机信号输入端。
步进电机的原始模型起源于1830年至1860年间世纪年代后期,随着永磁材料和半导体技术的发展,步进电机很快的发展并成熟起来。20世纪60年代后期我国开始研究和制造步进电机。从那时到60年代末,主要是高校和科研院所为研究一些装置而开发的少量产品。70年代初开始,生产和研究才有所突破。70年代中期至80年代中期进入发展阶段,各种高性能产品不断被开发出来。80年代中期以后,由于对混合式步进电机的开发和研制,我国混合式步进电机的技术,包括本体技术和驱动技术在内,都逐渐接近国外产业的水平,各种混合式步进电机及其驱动器的产品应用逐渐多起来。
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化设备中。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。混合式步进电机是综合了永磁式和反应式的优点而设计的步进电机。它又分为两相、三相和五相,两相步进角一般为1.8度,三相步进角 一 般为 1.2度 ,而五相步进角 一 般为0.72度。
混合式步进电机常见问题
-
步进电机分三种:永磁式(PM) ,反应式(VR)和混合式(HB)。 反应式步进一般为两相,转矩和体积较小,步进角一般为7.5度 或1.5度;永磁式步进一般为三相,可实现大转矩输出,步进角一般为1.5度...
-
步进电机分三种:永磁式(PM) ,反应式(VR)和混合式(HB)。反应式步进一般为两相,转矩和体积较小,步进角一般为7.5度 或1.5度;永磁式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,...
-
结合永磁电机和励磁电机各自特性的电机叫混合式电机
步进电机是一种能够将电脉信号转换成角位移或线位移的机电元件步进电机
分三种:永磁式(PM) ,反应式(VR)和混合式(HB)。
反应式步进一般为两相,转矩和体积较小,步进角一般为7.5度 或1.5度;永磁式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相、三相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度,混合式步进电机随着相数(通电绕组数)的增加,步进角减小,精度提高,这种步进电机的应用最为广泛。
混合式步进电机分为两相、三相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度,混合式步进电机随着相数(通电绕组数)的增加,步进角减小,精度提高,这种步进电机的应用最为广泛。混合式步进电机综合了反应式和永磁式步进电机两者的优点:极对数等于转子齿数,可以根据需要在很大范围内变化;绕组电感随
转子位置变化较小,易于实现最佳运行控制;轴向充磁磁路,使用高磁能积的新型永磁材料,有利于电机性能的提高;转子磁钢提供励磁;在整个运行区域没有明显的振荡。
混合式步进电机文献

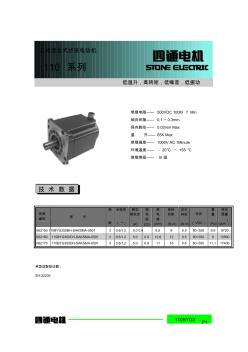 110三相混合式步进电机
110三相混合式步进电机
典型适配驱动器: SH-32205 货物 编码 型 号 相 数 步距角 ( °) 静态 相电流 (A) 相 电 阻 (Ω ) 相 电 感 (mH) 保持 转矩 (N m) 定位 转矩 (N m) 电压 (VDC) 重 量 (Kg) 转动 惯量 (gcm 2 ) 062150 110BYG350BH-SAKSMA-0501 3 0.6/1.2 5.0 0.9 8.5 8 0.5 80~350 6.6 9720 062160 110BYG350CH-SAKSMA-0501 3 0.6/1.2 5.0 0.9 12.6 12 0.5 80~350 9 13560 062170 110BYG350DH-SAKSMA-0501 3 0.6/1.2 5.0 0.9 11 16 0.6 80~350 11.1 17400 三相混合式步进电动机 110 系列 低温升,高转矩,低噪音,低振动 绝缘电阻——
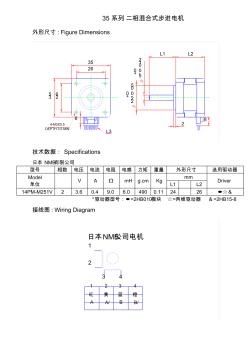 35系列二相混合式步进电机
35系列二相混合式步进电机
35系列二相混合式步进电机 外形尺寸 : Figure Dimensions 35 26 35 26 4-M3X0.5 DEPTH 3.5 MIN 6 5+ 0 -0 .0 12 22 +0 -0 .0 5 2 8 L1 L2 L3 技术数据: Specifications 日本 NMB有限公司 型号 相数 电压 电流 电阻 电感 力矩 重量 外形尺寸 选用驱动器 Model 单位 V A Ω mH g.cm Kg mm Driver L1 L2 14PM-M251V 2 3.6 0.4 9.0 6.0 490 0.11 24 26 ●☆& *驱动器型号:●=2HB010模块 ☆=两维驱动器 &=2HB15-8 接线图 : Wiring Diagram 1 2 3 4 1 2 43 橙蓝黄红 A A/ B B/ 日本NMB公司电机 39系列二相混合式步进电机 外形尺寸 : Fi
混合式步进电机由定子和转子两部分组成。常见的定子有8个极或4个极,极面上均匀分布一定数量的小齿;极上线圈能以两个方向通电,形成A相和万相,B相和B相。它的转子也由圆周上均布一定数量小齿的两块齿片等组成。这两块齿片相互错开半个齿距。两块齿片中间夹有一只轴向充磁的环形永久磁钢。显然,同一段转子片上的所有齿都具有相同极性,而两块不同段的转子片的极性相反。混合式步进电机的结构图如图3-1.图3-2是四相混合式步进电机以圆周展开的剖面模型。图3-2上图是转子S极所出的剖面图,图3-2下图是N极剖面图。图3-2中,定子齿距和转子齿距相同。先考虑磁极I和磁极IB下面的磁场。定子线圈通电后,磁极I产生N极,磁极m产生S极 。
因为N极这段的转子齿和S极转子齿相互错开半个齿距,所以,仅靠定子电流磁场并不能向磁阻式电机那样产生有意义的转矩。但是,把永久磁钢产生的磁场叠加上去,情况就不一样了。因为磁极I下面的两冷磁场相互增强,因此产生向左的驱动力;而磁极m下面的两个分量相互抵消,向右的力大大削弱。再看图3-2下图,磁极m下面的定子磁场和转子磁场方向相同,磁极I下面的磁场方向相反,最终得到向左的合力。转子在驱动力的作用下将转过工齿距,驱动力降为零,达到平衡位置。
如果切断磁极I、III的激磁,同时向磁极II , IV上的线圈通入电流,分别产生S极和N极。转子将向左再走一步。按照特定的时序激磁,如A-B -A -B-A-"',电机就能沿逆时针方向连续旋转。改变激磁时序,以A-B-A-B-A-…激磁,电机将沿顺时针方向连续旋转。
混合式步进电动机内部结构特殊,是一类高度非线性的机电装置。 1986年Hanselman采用磁场的“磁网络单元法”来计算反应式步进电机的磁场。1988年,G Heine提出了精确的混合式步进电机的等值磁网络模型,首次在模型中考虑了定子极间漏磁通,每极边缘转矩对电机矩角特性及步距误差的影响,分析了四相混合式步进电机谐波转矩对电机矩角特性及步距误差的影响,但是这种模型耗费的机时量仍然很大 。
为简化数学分析, 沿用G.Heine提出的混合式步进电机等值磁网络模型,以典型的二相八极混合式步进电动机,忽略铁心饱和和高次谐波对电机磁系统的影响 (铁心饱和和高次谐波往往是步进电机极限运行时的状况,正常运行时,不会对定性分析的结论有原则性的影响),建立了分析细分驱动的简化基本数学模型。混合式步进电动机绕组电感参数的特点与普通电机有区别,具有轴向和径向混合的磁系统,定转子双凸结构。在二相混合式步进电机磁网络模型简化磁路图中,定子八个极中在直径上相对的两个极的电磁状态完全相同,可以合并。这样电机的每一端只有4条支路。
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自戴化设备中。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。当步进驱私器接收到一个脉冲信号,它就驱动步进申机按设定的方向转动一个固定的角度(即步进角)。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。
工业控制中采用的定子磁极上带有小齿,转子齿数很多的结构,其步距角可以做得很小。图2混合式步进电机绕组接线图中A,B两相绕组沿径向分相,沿着定子圆周有8个凸出的磁极,1,3,5,7磁极属于A相绕组,2, 4, 6, 8磁极属于B相绕组,定子侮个极面上有5个齿,极身上有控制绕组。转子由环形磁钢和两段铁芯组成,环形磁钢在转子中部,轴向充磁,两段铁芯分别装在磁钢的两端,使得转子轴向分为两个磁极。转子铁芯上均匀分布50个齿,两段铁芯上的小齿相互错开半个齿距,定转子的齿距和齿宽相同 。
混合式步进电机相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 混合气
- 化学调理
- 净水剂
- VGA
- 塑料高速混合机
- 亚甲蓝
- 水泥混合砂浆
- 污水二级处理
- 共沸混合物
- 微孔板振荡器
- 卡片式存储器
- 双模混合动力系统
- 聚氯化铝
- amd混合交火技术
- 自来水过滤器
- 混合所有制体制改革
- 循环荷载作用下混合式钢交错桁架结构的滞回性能试验研究
- 互联网和移动终端的机械设计课程混合式教学模式
- 混合式教学在工程力学课程中应用的可行性分析
- 步进电机学术论文之三大功率步进电动机的控制驱动电路
- 步进电机闭环控制器使用手册2.30-半闭环编码器版
- DY3系列三相混合式步进电机驱动器(用户手册)
- 国产车四线式步进电机怠速空气阀的分类及驱动方法
- BIM在建筑施工技术课程混合式教学中的应用思考
- 公路工程单价和包干混合式合同管理模式应用
- 步进电机28BYJ48介绍和驱动
- 步进电机细分驱动控制系统
- 地板辐射供冷与地板送风混合式空调系统应用分析
- 中国建筑史混合式教学方法探索
- 建筑装饰设计混合式翻转课堂的教学模式
- 舰主汽轮循环水泵微机步进电机控制系统的研制
- 人工智能混合式大学英语教学中应用
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
拆边机
大山槟榔
上海地铁维护保障有限公司通号分公司
甘肃中维国际招标有限公司
舌花雏菊
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
华润燃气(上海)有限公司
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司