跟踪误差仿真研究中的跟踪误差
仿真过程中,固定平台Y轴,X和z轴运动,期望Z轴在X,Z平面上运动轨迹为
从仿真结果我们可以看出,模糊CMAC作用力跟踪阻抗控制器能补偿平台动力学上的不确定性,基于位置阻抗控制的性能稍微优于基于力矩阻抗控制。为了进行仿真比较,我们用CMAC代替FCMAC进行仿真,固定y轴,X和z轴运动,期望z轴在x和Z平面上运动轨迹为
从仿真结果我们可以看出,FCMAC性能优于CMAC,基于位置阻抗控制的性能稍微优于基于力矩阻抗控制。另外,由于基于位置的阻抗控制方案无需改变内部的控制结构便可使位置控制平台系统实现鲁棒性作用力控制。
跟踪误差造价信息
跟踪误差视频跟踪器误差
视频跟踪器误差是纯粹的图像处理自身的误差,是以判断图像像元的最小分辨率来定义的。通常跟踪器的误差不大于l/2像素。根据光电系统所采用的红外热像仪或电视摄像机的视场,可以很方便地估算出对应不同视场时像元数的尺寸大小。
跟踪误差视频跟踪器噪声
视频跟踪器的噪声是信号处理电路造成的,正常情况下,跟踪器噪声不大于一个像素。同理,可根据光电系统所采用的光电传感器视场计算出对应不同视场时像元数的尺寸大小,从而得到视频跟踪器噪声造成的跟踪误差。
跟踪误差通信延迟
取差器对目标的跟踪算法以及将误差以一定的时间报告给CPU,这种时间延迟将影响跟踪精度。报告延迟通常小于一帧,即20 ms。
跟踪误差稳定误差
造成瞄准线稳定误差的主要因素如前所述。跟踪误差是和瞄准线稳定误差密切相关的,瞄准线的晃动直接导致跟踪误差的形成。
跟踪误差跟踪控制回路误差
跟踪控制回路是由视频取差器,通过对目标瞄准点与瞄准线之间取差作为指令输入,经由跟踪控制器、滤波器、放大器、驱动器、电动机等去驱动万向架和光电传感器跟踪目标。并通过光电传感器瞄准线的位置构成闭环回路。该回路伺服性能的好坏,即稳态误差的大小和系统的动态品质等,均和跟踪误差密切相关。
跟踪误差仿真研究中的跟踪误差常见问题
-
绝对误差 = | 示值 - 标准值 | (即测量值与真实值之差的绝对值) 相对误差 = | 示值 - 标准值 |/真实值 (即绝对误差所占真实值的百分比) 【补充说明】系统误差:就...
-
误差是测量过程中必然存在的,而且也不可能准确计算的部分,只能通过不同的方法得到大概的数值,计算方法如图:
-
截图看一下
跟踪误差仿真研究中的跟踪误差文献

 造价中的误差分析
造价中的误差分析
造价中的误差简析 范军锋 误差是造价中经常提到的一个词, 今天我就自己对误差的理解进 行一下简单的阐述。 首先,误差是允许的,也就是说,误差是可以接受的。从国家 规定看,我国有关部门规定的造价误差是正负 3%,即,计算值或是 审核值与实际真实造价可以有一个 3%的差异。举个例子就是,假设 某造价工程师核算某某工程的造价,通过计算工程量,套取定额,取 定材料价格,按照规定取完各项费用后的最终定稿为 100万元,若实 际成本金额在 97万元与 103万元之间都认为该造价工程师核算出来 的金额是合理的,直接说就是正确的。 为什么会有这样的规定呢?这要从造价误差的来源说起。造成 误差的原因无非量价费三方面的某一项或某两项或三项全部都有差 异。一般来说,工程量上的错误我们是可以避免的, 特别是在 BIM技 术的日益普及下, 相信不久的将来, 工程量上的误差会随着算量技术 的提高而不复存在,这个是理想
 商砼误差
商砼误差
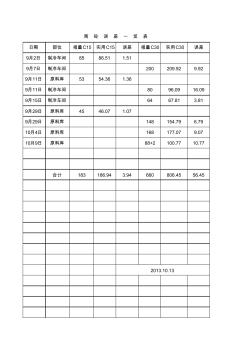
日期 部位 报量C15 实用C15 误差 报量C30 实用C30 误差 9月2日 制冷车间 85 86.51 1.51 9月7日 制冷车间 200 209.92 9.92 9月11日 原料库 53 54.36 1.36 9月11日 制冷车间 80 96.09 16.09 9月15日 制冷车间 64 67.81 3.81 9月29日 原料库 45 46.07 1.07 9月29日 原料库 148 154.79 6.79 10月4日 原料库 168 177.07 9.07 10月9日 原料库 88+2 100.77 10.77 合计 183 186.94 3.94 660 806.45 56.45 商 砼 误 差 一 览 表 2013.10.13
常规的反馈控制仅利用了当前控制时刻的信息,当目标输入变化时,会因控制滞后而产生跟踪误差,因而仅利用常规的反馈控制不能满足高精度跟踪的要求。跟踪误差如从频域分析,可以分为由幅值误差引起的和由相位误差引起的两部分。为了减小误差,可考虑对它们分别进行补偿。对于前者可以用.放大器进行补偿,对于后者则可采取零极点对消的办法来进行相位补偿,但这种方法只适用于最小相位系统.对于非最小相位系统,接此原则设计系统剐会导致不希望的零极点对消。
为避免这一点,Tomizuka等人在1987年提出了采用预见控制,利用未来信息使从目标输到控制输出的相位差在全频率域内补偿到0的设计方案,即零相位误差跟踪控制(ZPETC) 。1992年舟桥康行、山田学在 采用两自由度控制系统的设计方法来设计零相位跟踪控制器,不仅将从目标输入到控制输出的相位差在垒频率域内补偿到 0,而且可谓整控制系统的增益特性。但是他所针对的典型信号中没有包括正弦信号,在跟踪正弦信号时,仍存在幅值误差,而且其设计过程比较复杂,不便于实际应用。
【目标跟踪误差】target tracking error
由动态滞后及其变化、角闪烁、目标起伏等因素引起的跟踪误差。
动态滞后误差是由于目标的运动而产生的,与目标的角速度、角加速度和伺服系统速度误差常数、加速度误差常数有关,表现为天线的运动滞后于目标的运动,使目标偏离电轴,从而产生一个误差电压;动态滞后的变化与目标的角速度变化、角加速度变化和伺服系统速度误差常数、加速度误差常数及设备时延有关,一般情况下该项误差很小,可以不予考虑。
角闪烁是由目标不同部位反射干涉而引起的角误差,产生角闪烁的原因目前有目标回波波前畸变或回波能量传播方向畸变两种解释;目标起伏表现为天线所收到回波的强度发生变化,当目标运动、翻滚,或雷达对目标的视角发生变化时,均会引起回波强度的变化,在雷达测量过程中这种变化是随机的,所以也称随机噪声。 2100433B
- 中文名称
- 角跟踪误差
- 英文名称
- angle tracking error
- 定 义
- 雷达跟踪目标时,雷达天线瞄准轴和目标视线间的夹角。
- 应用学科
- 航空科技(一级学科),航空电子与机载计算机系统(二级学科)
跟踪误差相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 跟高手全面学会PLC技术:轻松学通欧姆龙PLC技术
- 跟Microsoft工程师学技术文档编写
- 跨临界CO2引射制冷循环动态热力平衡的运动稳定性理论
- 跨临界CO2热泵的并行复合循环关键技术及其应用
- 跨区电力输送
- 跨区跨省电力优化调度暂行规则
- 跨座式单轨交通供电系统
- 跨文化建筑语境中的建筑思维
- 跨步电位差
- 跨步电压测量(地网)
- 跨步电压电击
- 跨江越海大断面暗挖隧道修建关键技术与应用
- 跨河水准测量
- 跨流域开发
- 跨流域引水环境下水库汛期水位实时动态控制研究
- 跨流域水电开发
- 分形DGS单元结构设计及其在微带电路中的应用
- 云计算技术在城市轨道交通运营指挥管理系统中的应用
- 新型透水衬砌在南台子一级水电站尾水渠中的尝试
- 有限元法在软土浅埋隧道施工过程的动态模拟中的应用
- 振冲碎石桩地基加固技术在椒江标准海塘工程中的应用
- 智能建筑工程设计中的机电设备集成配置系统总体设计
- 乙烯基树脂混凝土电解槽的性能及在湿法冶金中的应用
- 智能化技术在电气工程自动化控制中的应用与实践研讨
- 智能电力监控管理系统在某飞机维修公司工程中的应用
- 异形人工挖孔桩和预应力土层锚杆组合在基坑中的应用
- 智能照明系统在高校教学楼建筑节能改造中的应用
- 园林景观工程在推进城乡宜居环境建设中的问题及思考
- 新型自行式全旋转桥梁检修车在桥梁工程中的应用
- 振碾式渠道混凝土衬砌机在南水北调中线工程中的应用
- 新型免扎线绝缘子在配电网架空线路中的应用
- 中博会展中心C1区钢结构屋面大型主桁架的施工技术
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
广东国咨招标有限公司
Excel 数据处理与分析应用大全
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
拆边机
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
苏州弘创招投标代理有限公司