钢筋混凝土结构配筋原位图示法
《钢筋混凝土结构配筋原位图示法》是2003年2月出版的图书,作者是张元坤。
钢筋混凝土结构配筋原位图示法基本信息
| 书名 | 钢筋混凝土结构配筋原位图示法 | 作者 | 张元坤 |
|---|---|---|---|
| ISBN | 9787535923103 | 页数 | 80 页 |
| 定价 | 35.0 | 出版社 | (修订版) (2003年2月1日) |
| 出版时间 | 2000-2 | 装帧 | 平装 |
《钢筋混凝土结构配筋原位图示法(修订版)》由广东科技出版社出版。
钢筋混凝土结构配筋原位图示法造价信息
钢筋混凝土结构配筋原位图示法常见问题
-
钢筋混凝土结构中使用钢筋最大直径是40mm的三级螺纹钢筋。不过一般的框架梁纵向受力钢筋选用25、22、20、18的钢筋,跨度不大的小梁,也有用16、14的。一般梁的箍筋选用8的较多,也有用10的,小梁...
-
套修缮定额,那上面有,实在没有的话就对定额进行调整
-
钢筋混凝土结构的房子。 大概750~1000元一平米,地面的造价预算也包括在内了。 地面按使用不同厚也不同,一般在20~30厚左右吧。 总体预算可以按...
钢筋混凝土结构配筋原位图示法文献

 钢筋混凝土结构用钢
钢筋混凝土结构用钢
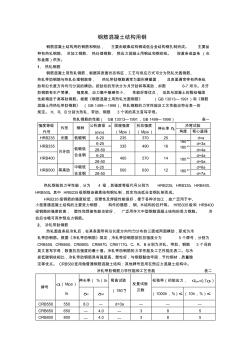
钢筋混凝土结构用钢 钢筋混凝土结构用的钢筋和钢丝, 主要由碳素结构钢或低合金结构钢扎制而成。 主要品 种有热轧钢筋、 冷加工钢筋、 热处理钢筋、 预应力混凝土用钢丝和钢绞线。 按直条或盘条 (也 称盘圆)供货。 1、 热轧钢筋 钢筋混凝土用热轧钢筋,根据其表面状态特征,工艺与供应方式可分为热轧光圆钢筋、 热轧带肋钢筋与热轧处理钢筋等, 热轧带肋钢筋通常为圆形横截面, 且表面通常带有两条纵 肋和沿长度方向均匀分别的横肋。按肋纹的形状分为月牙肋和等高肋,如图 6-7 所示。月牙 肋钢筋有生产简便、 强度高、应力集中敏感性小、 性能好等优点, 但其与混凝土的黏结锚固 性能稍逊于高等肋钢筋。根据《钢筋混凝土用热轧光圆钢筋》 (GB 13013— 1991)和《钢筋 混凝土用热轧带肋钢筋》 (GB 1499—1998),热轧钢筋的力学性能及工艺性能应符合表一的 规定。 H、R、B分别为热轧、带肋、钢
 钢筋混凝土结构 (2)
钢筋混凝土结构 (2)
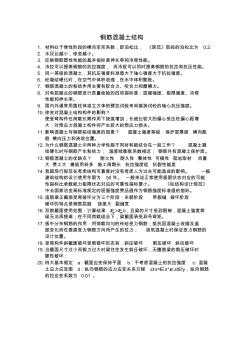
钢筋混凝土结构 1. 材料处于弹性阶段的横向变形系数,即泊松比, 《规范》取砼的泊松比为 0.2. 2. 水灰比越小,徐变越小。 3. 反映钢筋塑性性能的基本指标是伸长率和冷弯性能。 4. 冷拉可以提高钢筋的抗拉强度, 而冷拔可以同时提高钢筋的抗拉和抗压性能。 5. 同一等级的混凝土,其抗压强度标准值大于轴心强度大于抗拉强度。 6. 砼凝结硬化时,在空气中体积收缩,在水中体积膨胀。 7. 钢筋混凝土的粘结作用主要有胶合力、咬合力和摩擦力。 8. 对有屈服点的钢筋进行质量检验的四项指标是:屈服强度、极限强度、冷弯 性能和伸长率。 9. 国内外通常用圆柱体或立方体的劈拉试验来间接测试砼的轴心抗压强度。 10.徐变对混凝土结构构件的影响? 使受弯构件在荷载长期作用下挠度增加;长细比较大的偏心受压柱偏心距增 大;对预应力混凝土构件将产生较大的预应力损失。 11.影响混凝土与钢筋粘结强度的因素?
图示为轴线控制桩。
设计一种研究数字控制(尤其是各种数字插补算法及其性能和状态的研究)的专用数字图示仪,其适用于数控人才培养。该图示仪能对控制芯片发出的各类脉冲和电平信号实时捕获,并进行分析,通过图形的形式形象地将插补算法,脉冲信号以及运动轨迹之间的关系以一组按比例缩放的脉冲序列和一个坐标图的形式显示出来。它具有结构简单,价格低廉,功能实用等特点。
1系统硬件设计
系统以采用NXP公司的ARM7 LPC2136高速处理器作为核心处理硬件,该处理器体积少,功耗低,价格便宜,性能较高,I/O资源丰富,运算速度满足系统需求。根据功能的设计要求,系统的硬件组成划分为面板控制模块、液晶显示模块、核心处理单元和运动控制模块4大部分。
面板控制模块是由电位器、琴键开关和扭置开关等组成的简单电路,供使用者进行输入设置和调整。ARM处理器通过A/D采样和电平检测,获取电位器分担的电压和各个开关的状态,从而获取输入信息。之后根据输入信息处理,及时调整液晶屏幕上的显示,实现示波调整和观测内容切换的功能。液晶显示模块采用的是金鹏电子生产的OCM 128×128液晶显示屏,其成本低,体积小,信号处理简单,驱动技术成熟,十分适合本系统的应用。液晶屏的地址和数据共用数据总线,通过专用端口(如 C/D,CE,RD,WR等)控制数据和命令的输入与输出,其接口关系和时序简单明确,在ARM处理器上编写驱动程序十分简单。运动控制模块基于专用运动控制芯片MCX314,它拥有4轴(x,y,z,μ轴)驱动能力。MCX314芯片向步进电动机驱动器输出高低电平来控制电机的转动方向;输出变频脉冲信号来控制电机的转速。在一定的频率范围内,芯片输出脉冲频率越高,电机的转速越高。ARM处理器对MCX314的输出脉冲进行捕获,获取脉冲的时延,准确测得各轴的频率值,再通过软件算法将插补脉冲与刀具的运动速度和运动方向结合起来,产生运动轨迹数据,通过显示器模拟出来。从而直观地显示出脉冲插补和运动轨迹的对应关系,达到预期的实验效果。
系统的具体实现上,MCX314输出的信号分别为方向信号(高低电平)和脉冲信号,PP代表脉冲;PM代表方向;z,y,z分别对应各方向轴。液晶屏采用 I/O方式驱动,ARM处理器由P0.12~PO.15端口输出控制信号,由P0.16~P0.23端口写入或读取数据。显示波形的纵向增益、横向增益、触发电平及波形的扩展分别通过4个不同的电位器控制,ARM处理器对电位器上的电压进行A/D采样获取输入信息。另外,还设计了脉冲、特性和电压测试,以扩展该数字图示仪的应用场合。
软件系统设计
软件系统由运行在实时操作系统μC/OS-Ⅱ上的两个任务和独立于操作系统的一个中断服务程序组成。显示更新任务负责将传人数据以图形方式及时准确地显示在显示屏上;操作检测任务负责将外界各项操作的电平信号转换为一定格式的数据传递给操作系统的其他任务,以便下一步处理;脉冲捕获中断服务程序负责计算运动控制芯片发送的脉冲频率,并检测方向电平的状态,确定电机转动方向。
(1)显示更新任务:该任务启动后将检测更新信号是否到来。若信号没有到来,操作系统将其从运行状态转入等待状态;若更新信号到来,程序从邮箱中取出中断服务程序发送的各轴计数值或操作检测任务发送的显示设置信息。经换算和比较后,选定频率最高的轴作为基准,将其与另外两个轴的脉冲一同显示在脉冲显示区中,并以正负号的方式在屏幕的方向标志区上指示出各轴的运动方向。随后再根据频率值f和步进电机在单个脉冲下驱动刀具直线运动的距离l计算出实际速度,按照一定比例N衰减后得到显示屏上的各轴运动速度v=fl/N和行进距离s=vt,进而绘制出刀具各轴向的大致行走情况。
(2)操作检测任务:该任务启动后将定时进行A/D采样和I/O电平检测,并与上次结果进行对比。如果电位器的电位发生较大的变化或功能选择的I/O电平发生变化时,就将变换值以约定好的数据形式通过邮箱发送给显示更新任务,并发送更新信号量,通知显示更新任务刷新显示屏。
(3)信号捕获中断服务程序。
发生中断后首先判断是哪一个轴产生的中断,然后将计数值存放在相应的变量中,并清除计时器的值,接着读取方向信号的电平。在与上一次的计时数值比较后,如果相同,则说明机床在做直线运动,不需要刷新显示屏,程序返回;如果计数值或电平发生了变化,则通过邮箱向更新任务发送相关数据,然后发送信号量通知屏幕刷新。
系统测试与应用
经测试,该系统在最高脉冲频率为200kHz的运动控制芯片驱动下能够正常显示各轴脉冲的比例关系和相应的频率值,并能准确地描绘出如直线、简单曲线和基本弧形等加工轨迹。图示仪的最大响应延时约为30 ms,基本上能满足设计要求。
图6是驱动器最高脉冲频率为20 kHz下加工弧形时绘制的图形。图中弧形约占5π/8,横轴和纵轴的速度比约为2:1。在驱动器允许范围内,频率表与速度成正比,即频率比也约为2:1。图中测试值基本符合理论值。
该系统应用于数控机床实验系统,教学中,取得了较好的实验教学效果,学生反应良好。
结话
在此着重介绍了基于ARM的运动轨迹数字图示仪的设计,分别从硬件设计和软件设计两个方面描述了系统的实现方法。它通过较低的成本,解决了数控研究和教学过程中分析插补算法、插补脉冲和刀具运动轨迹三者间关系的困难问题,在教学实用性上效果明显。
其中△代表一个标识,ω代表预算法,名字Q代表变量(如int a,b等),
算法用到三个栈:a栈,b栈,in栈。
其中a栈用来存储逆波兰式,b用来存储△号和运算符,in栈为输入栈。
第一竖排为b栈中符号,第一横排为输入栈中符号。
pop(in)为输入栈栈顶元素出栈,pop(a,Q)为Q入a栈,NEXT算法即为进行下一轮循环,其中ω1<ω2为算符优先级,如"+"和"-"<"*"和"/"。pop(b,B),push(b,B)中B为临时变量,用来存储出栈的元素。stop为算法结束。
算法开始时,现将△如b栈,输入栈以#号结尾。
?
输入流 b[s-1] | 名字Q? | ( | ω2 | )? | # |
△ | POP(in); PUSH(a,Q) NEXT | POP(in); PUSH(b,△) NEXT | POP(in) PUSH(b,ω2) NEXT | POP(in) POP(b,B)?NEXT | STOP |
ω1 | POP(in) PUSH(a,Q)? NEXT | POP(in) PUSH(b,△) NEXT | 若ω1<ω2,则 POP(in) PUSH(b,ω2) NEXT? 若ω1≥ω2,则POP(in) POP(b,B), PUSH(a,B) | POP(b,B) PUSH(a,B) | POP(b,B) PUSH(a,B) |
钢筋混凝土结构配筋原位图示法相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 钢筋混凝土简支梁加载试验模拟辅助教学软件
- 多层钢筋混凝土框架结构毕业设计实用指导
- 钢筋混凝土环板壳基础和截锥壳基础
- 钢筋混凝土高层建筑结构设计
- 品味钢筋混凝土
- 钢筋混凝土工程施工
- 钢筋混凝土基本构件
- 钢筋混凝土结构施工技术入门
- 钢筋混凝土剪力墙结构毕业设计指导
- 冷轧钢筋混凝土构件技术规程
- PrinciplesofReinforcedConcrete钢筋混凝土原理
- 中等职业教育国家规划教材·钢筋混凝土结构
- 钢筋混凝土空心剪力墙
- 钢筋混凝土支座
- 钢筋混凝土框架及排架结构施工
- 钢筋混凝土的全寿命过程与预计
- 多逆变器太阳能光伏并网发电系统的组群控制方法
- 有源配电网设备利用率影响因子体系及其价值计算方法
- 有限元法在软土浅埋隧道施工过程的动态模拟中的应用
- 新型基于热力学法的水泵效率数学模型及应用
- 原来这就是辨别冷热水管正确方法商家终于肯说实话了
- 云南省建设工程造价协会优秀工程咨询成果奖评选办法
- 新的基于NGA/PCA和SVM的特征提取方法
- 乙烯基树脂混凝土电解槽的性能及在湿法冶金中的应用
- 应用清单招标与经评审的最低投标价法评标的几点思考
- 定征复合板材粘接层性质的非线性超声兰姆波方法
- 圆形隧道反向曲线隧道中心线两种偏移计算方法的比较
- 杂散电容对交流法微电容测量电路噪声特性影响的分析
- 招标师招标采购法律法规与政策题型分析辅导材料
- 主要用固体工业废渣生产硫铝酸盐水泥熟料的方法
- 中国2010年上海世博会园区管线综合管沟管理办法
- 中华人民共和国大气污染防治法实施细则中英对照资料
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
广东国咨招标有限公司
Excel 数据处理与分析应用大全
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
拆边机
大山槟榔
上海地铁维护保障有限公司通号分公司
甘肃中维国际招标有限公司
舌花雏菊
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
华润燃气(上海)有限公司
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
苏州弘创招投标代理有限公司