半规则数模
SolidWorks是功能强大、易学易用和高效创新的三维CAD系统,可进行机械设计、零件设计、模具设计、装配体和工程图设计、消费品设计等。
半规则数模基本信息
| 中文名 | 半规则数模 | 外文名 | SolidWorks |
|---|---|---|---|
| 进 行 | 机械设计、零件设计、模具设计 | 实 现 | 2D—3D转换 |
传统的机械绘图,是想象出零部件的立体形状,然后对立体模型从各个方向上投影,生成各投影面上的二维视图,加以标注尺寸等注释,生成基本的二维的图纸。
但是二维图纸的缺点也是明显的,就是略复杂点的就显得不直观,需要人为的正确想象。如果有三维的数模展现,并且能旋转、缩放,就更加直观易懂了。
现在有了三维CAD软件SolidWorks的辅助,实现2D—3D转换,生成一般的三维数模是比较简单的事。对于从AutoCAD到三维软件过渡的设计者来说,SolidWorks的这个功能容易上手,可以帮助你轻松完成从AutoCAD到三维CAD软件的跨越。
○ SolidWorks简介
SolidWorks是功能强大、易学易用和高效创新的三维CAD系统,可进行机械设计、零件设计、模具设计、装配体和工程图设计、消费品设计等。
SolidWorks公司成立于1993年,1995年推出了第一版SolidWorks95。1997年SolidWorks公司被达索收购(也就是CATIA母公司)。SolidWorks公司致力于将大家认为复杂、高级的3D CAD应用简易化、平民化,使绝大部分工程师都能快捷上手。SW公司100%投入于3D CAD的研究、根据客户需求提供强有力的技术创新、为工程师整合全面的辅助系统(CAE 等)。公司目标是成为机械设计领域中的三维标准。
从2D-3D的跨越可谓是传统机械绘图的逆向过程。输入的2D草图可以是AutoCAD的DWG格式图纸,也可是SolidWorks工程图,或者是SolidWorks的草图。 本文讨论如何从AutoCAD的图纸输入到SolidWorks中实现2D—3D的转换。原理:很多三维CAD/CAM软件的立体模型的建立,是直接或间接的以草绘(或者称草图)为基础的,这点尤以PRO/E为甚。而三维软件的草绘(草图),与AutoCAD等的二维绘图大同小异(不过不同的就是前者有了参数化的技术)。
在SolidWorks中,就是将AutoCAD的图纸输入,转化为SolidWorks的草图,从而建立三维数模。 基本转换流程1.在SolidWorks中,打开AutoCAD格式的文件准备输入。
2.将*DWG,DXF文件输入成SolidWorks的草图。
3.将草图中的各个视图转为前视、上视等。草图会折叠到合适的视角。
4.对齐草图。
5.拉伸基体特征。
6.切除或拉伸其它特征。 在这个转换过程中,主要用2D到3D工具栏,便于将2D图转换到3D 数模。 下面以AutoCAD2004和SolidWorks2005为例,看一下如何从AutoCAD的图纸输入到SolidWorks中: 一、2D图纸准备工作因为此转换主要是用的绘图轮廓线,其余的显得冗余,所以在AutoCAD中,需要将二维图形按照1:1的比例,绘制在一个独立的层中,比如“0层”。 注意:输入SolidWorks的CAD二维图形一定要注意比例,在单位统一的前提下(比如都是毫米),SolidWorks是严格按照输入的CAD图形转换为草绘并生成数模的。 如果是已经绘制好的图纸,调整各个视图,并将其它图素如中心线,标注线,剖面线等等分别设置在各自独立的图层中。
二、将AutoCAD的图形转换并导入SolidWorks 打开SolidWorks,选择“打开”,从下拉列表中选择“DWG”文件,“DXF/DWG”输入对话框出现。选择第三项,“以草图输入到新零件”即导入AutoCAD格式的文件。选择“下一步”图3。以草图输入到新零件 出现“工程图图层映射”对话框,在“显示图层下面”,选择“所有所选图层”,在下面的图层选择中,选中“0层”前面的选择框,因为基本轮廓图形都是在“0层”中绘制,故只将此层中的图形输入到SolidWorks中。 预览:在输入前,利用“预览”下的图形浏览工具,可以象AutoCAD一样进行图形的放缩,局部放大,平移等视图操作。“白色背景”:将背景颜色设置为白色。
选择“输入此图纸为”:模型
选择下一步,出现文件设定对话框。
文件设定对话框 输入数据的单位:按照习惯,一般选择“毫米”。
选择“添加约束”和“合并点”,选择输入此图纸为“2D草图”,这样可以把AutoCAD的图形转换为3D软件中的草绘,便于后续三维模型的生成。单击“完成”,成功将AutoCAD的图形转换并导入。
注意:由于在生成三维模型的特征时,各草绘的轮廓一般是封闭的(曲面除外),所以在进行下一步之前,最好检查一下,看草绘图线有无不封闭的情况,有无多余的线或点,各图线是否真正相交形成封闭图形。看草绘图线有无不封闭的情况 三、将草图定义出前视,上视,左视等视图 输入的草图是三维数模在各个方向上的投影,就是从不同方向上看去的视图,所以需要分别将其定义为前视,上视,左视等视图。
注意:在定义任何其它视图之前,必须先定义前视图。您可进行框选择、链选择,或按住 Ctrl 来单独选择。 具体操作:
选择视图,单击“2D-3D”工具栏上的“前视”,将其定义为前视图。前视 同样操作方法,将其它几个视图分别定义为上视,左视等视图。 四、定义辅助视图 定义辅助视图时注意必须在另一视图中选择一直线来指定辅助视图的角度。指定辅助视图的角度。 五、对齐草图 接下来要对齐草图。因为按照机械制图的原则,各个视图中的一些轮廓和边线是对齐的。选择一视图中的边线与在第二个视图中选择的边线对齐。选择的顺序很重要。
这个操作需要用到工具栏上的“对齐草图”命令。 对齐草图操作:
在将要与另一草图对齐的草图中选择一直线或点。
按住 Ctrl 并在第一草图将要与之对齐的第二草图中选择一直线或点。
单击 2D 到 3D 工具栏上的“对齐草图” ,或单击“工具”->“草图绘制工具”->“对齐”->“草图” 六、生成3D模型 最后进行重要的一步——生成3D模型,最常用的就是“拉伸/切除”命令。
注意:从所选草图实体拉伸特征,不必选择完整的草图,可以从整个草图中选择部分图形。可一次选一个或多个,但是各草图图形应该都是封闭的,才能生成实体特征(如拉伸,切除等)。 拉伸特征 在设计树中选择“草图1”,即输入的前视图,右键选择“编辑草图”,选择要拉伸的轮廓, 选择要拉伸的轮廓 单击“2D-3D”工具栏上的“拉伸”,基体-拉伸 PropertyManager 出现。 在“基体-拉伸” PropertyManager 中设置相关参数,编辑属性。 方向一:默认的拉伸方向,
默认的拉伸方向 可以输入拉伸的深度,或者指定要拉伸到的点或直线。根据投影原理,另一视图(上视图)的一投影边线就是拉伸的深度,我们选择上视图中的一终止点作为拉伸终点。 注意:对于 2D 到 3D 转换,可通过选择一草图实体来指定给定深度拉伸的深度。 最后按右键,一个拉伸的三维模型生成了。 添加一个切除特征 我们可以从辅助视图上的一个图形轮廓,在已经生成的拉伸实体中进行切除。 在辅助视图上选择小矩形,单击2D-3D工具栏上的“切除”,在对话框中指定切除的深度,完成切除。 总结 这种方法还有一个好处,就是形状复杂,其尺寸定位不规则的图形,也许在三维软件里绘制草图比较麻烦,在制作三维数模的时候,不用重复进行草绘,就可轻松生成。
上面举的只是一个最基本的例子,其实更复杂一些的图形也可以实现.SolidWorks的2D-3D的功能实现了从平面二维绘图到3D数模的跨越,是设计者从AutoCAD过渡到三维CAD软件的成功阶梯。对于一些常见的二维图纸,可以轻松实现到三维数模的转换,从而为以后的三维装配、干涉检查等奠定了基础。
半规则数模造价信息
半规则数模常见问题
-
y=a(z)+b(z)*x+u这里,a()和b()均为我们感兴趣的未知的非参数函数,故为半参数变系数模型
-
基于PIC单片机实现三相异步电动机的 电子软启动器设计 摘 要:论述了异步电动机的新型电子软启动器的设计及其原理,提出利用PIC单片机控制集成脉冲触发 器TC787A的移相电压来产生6路脉冲触发晶闸管...
-
可以不用设置 汇总计算后 报表查看图元工程量里就有
半规则数模文献

 调整基数模板
调整基数模板
序号 个人账号 姓名 证件类型 证件号码 业务月度 个人缴存 基数 单位缴存 比例 调整基数模板 个人缴存 比例 单位月缴存额 个人月缴存额 月缴存额 模板 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001 G001
 日夜型半球网络摄像机招标参数模板
日夜型半球网络摄像机招标参数模板
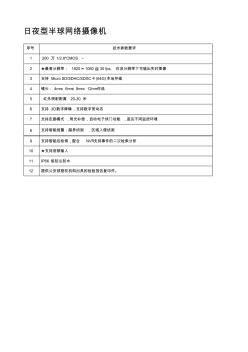
日夜型半球网络摄像机 序号 技术参数要求 1 200 万 1/2.8"CMOS · 2 ★最高分辨率: 1920×1080 @ 30 fps, 在该分辨率下可输出实时图像 3 支持 Micro SD/SDHC/SDXC卡 (64G)本地存储 4 镜头: 4mm、 6mm、8mm、12mm可选 5 红外照射距离 20-30 米 6 支持 3D数字降噪 ,支持数字宽动态 7 支持走廊模式 ,背光补偿 ,自动电子快门功能 ,适应不同监控环境 8 支持智能报警:越界侦测 ,区域入侵侦测 9 支持智能后检索,配合 NVR支持事件的二次检索分析 10 ★支持音频输入 11 IP66 级防尘防水 12 提供公安部授权机构出具的检验报告复印件。
控制规则是模糊半主动控制器的核心,它的正确与否直接影响到控制器的性能,其数目的多寡也是衡量控制器性能的一个重要因素,下面对控制规则做进一步的探讨。
模糊半主动控制规则来源
模糊控制规则的取得方式:
(1) 专家的经验和知识
模糊控制也称为控制系统中的专家系统,专家的经验和知识在其设计上有余力的线索。人类在日常生活常中判断事情,使用语言定性分析多于数值定量分析;而模糊控制规则提供了一个描述人类的行为及决策分析的自然架构;专家的知识通常可用if….then的型式来表述。
藉由询问经验丰富的专家,获得系统的知识,并将知识改为if….then的型式,如此便可构成模糊控制规则。除此之外,为了获得最佳的系统性能,常还需要多次使用试误法,以修正模糊控制规则。
(2) 操作员的操作模式
现在流行的专家系统,其想法只考虑知识的获得。专家可以巧妙地操作复杂的控制对象,但要将专家的诀窍加以逻辑化并不容易,这就需要在控制上考虑技巧的获得。许多工业系统无法以一般的控制理论做正确的控制,但是熟练的操作人员在没有数学模式下,却能够成功地控制这些系统:这启发我们记录操作员的操作模式,并将其整理为if….then的型式,可构成一组控制规则。
(3) 学习
为了改善模糊控制器的性能,必须让它有自我学习或自我组织的能力,使模糊控制器能够根据设定的目标,增加或修改模糊控制规则。
模糊半主动控制规则型式
模糊控制规则的形式主要可分为二种:
(1) 状态评估模糊控制规则
状态评估(state evaluation)模糊控制规则类似人类的直觉思考,它被大多数的模糊控制器所使用,其型式如下:
Ri:if x1 is Ai1 and x2 is Ai2 …. and xn is Ain
then y is Ci
其中x1,x2,…….,xn及y为语言变量或称为模糊变量,代表系统的态变量和控制变量;Ai1,Ai2,….,Ain及Ci为语言值,代表论域中的模糊集合。该形式还有另一种表示法,是将后件部改为系统状态变量的函数,其形式如下:
Ri:if x1 is Ai1 and x2 is Ai2 …. and xn is Ain
then y=f1(x1,x2,…….,xn)
(2)目标评估模糊控制规则
目标评估(object evaluation)模糊控制规则能够评估控制目标,并且预测未来控制信号,其形式如下:
Ri:if(U is Ci→(x is A1 and y is B1))then U is Ci
模糊半主动控制规则流程
实际应用模糊控制时,最初的问题是控制器的设计,即如何设计模糊控制法则。到目前为止模糊控制还没能像传统的控制理论一样,借由一套发展完整的理论推导来设计。下面简单介绍一下其设计概念:
图3.4所示为单输入和单输出的定值控制时间响应图,若使用状态评估模糊控制规则的形式,前件部变量为输出的误差E和在一个取样周期内E的变化量CE,后件部变量为控制器输出量U的变化量CU。则误差、误差变化量及控制输出变化量的表示为:
其中E表误差,R表设定值,Y表系统输出,U表控制输出,下标n表在时刻n时的状态。由此可知,误差变化量CE是随输出Y的斜率的符号变号,当输出上升时,CE<0, 下降时CE>0。
本文所设计的模糊控制器之输出输入关系为:
E,CE→CU
在一般控制的计算法上称为速度型,这是由于其输出为U对时间的微分,相当于速度的CU。在构造上也可采用以U为后件部变量的位置型,但前件部变量必需改用E的积分值。
由于由E与CE推论CU的构造中,CU与E的关系恰巧相当于积分关系U(t)=Ki∫E(t)dt,而CU与CE的关系相当于比例关系U(t)=KpE(t)的缘故,所以又称为Fuzzy PI控制。
设计模糊控制规则时,是在所设想对控制对象各阶段的反应,记述采取哪一种控制比较好;首先选择各阶段的特征点,记录在模糊控制规则的前件部,然后思考在该点采取的动作,记录在模糊控制规则的后件部。例如,在第一循环之a1点附近,误差为正且大,但误差变化量几乎是零,可以记为“E is PB and CE is ZO”在此点附近需要很大的控制输出,记为”CU is PB”;同样地,对于b1点、c1点、d1点等的附近,可分别得到如下的控制规则:
a1:If E is PB and CE is ZO then CU is PB
b1:If E is ZO and CE is NB then XU is NB
c1:If E is NB and CE is ZO then CU is NB
d1:If E is ZO and CE is PB then CU is PB
在第二循环之a2,b2等之附近,其E和CE的绝对值比a1,b1点中之值相对减少,所以其CU值相对地也较小,其控制规则如下:
a2:If E is PM and CE is ZO then CU is PM
b2:If E is ZO and CE is NM then CU is NM
表为依上述程序所构成的13条控制规则,其中纵列为E值,横列为CE值,表中所列之值为控制输出变化量CU值。由表可知规则数最多可为49条,此表只使用了其中13条控制规则,设计者可依实际需要自行加减规则之数量,如19条、31条等等,以改系统之响应。
数值模拟研究的主要工作程序对一个油气藏进行综合的数模研究,往往需要花较大的精力和较长时间(有时会达一年甚至更长的时间),同时还对计算机硬件和技术人员有很高的要求,然而尽管在不同的项目中,面对的问题会千差万别,但大多数油藏数值模拟的基本研究过程是一样的。为了使读者一开始就对数模研究工作有一个明确的整体概念,下面简要地介绍一下油藏数值模拟的主要工作程序。
问题的定义:开展油藏数模工作的第一步,是确定研究的目标和范围。即首先要给本次数模研究一个明确的定位,明确本次模拟要解决的主要问题是什么,需要研究哪些油藏动态特性,这些项目的完成对油藏的经营管理者会产生什么影响等等。从而根据项目的要求进行数值模拟研究程序设计,并收集有关的油藏基础地质、流体及生产动态数据。
D/A(数模转换)转换模块带有8路8位D/A转换专用芯片和精密电压基准,控制输出电压精度误差不大于0.01V。通过电脑串口(或其他具有串口的单片机、PLC、DSP)发个简单的可视ASCII指令,便可以方便地控制8个数模转换通道输出设定的电压值。比如,电脑串口输出字符串"C2V2660"到本控制板,则控制板将控制2号通道输出2.66V电压;电脑串口输出字符串"C6V3060"到本控制板,则控制板将控制6号通道输出3.06V电压.指令非常简单,完全不需了解复杂的硬件及时序控制。输出电压范围:0-5V(其中有2路可灵活设定输出电压最大值)。波特率9600,也可按用户要求定制。广泛用于通过电压控制的各个工控领域,如电机调速、压控振荡、伺服控制等。
半规则数模相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 半连续轧制
- 半龙门起重机
- 华东数控
- 华东海上风电省级高新技术企业研究开发中心
- 华东电力设备制造厂
- 华中建安防腐工程有限公司
- 华中科技大学材料科学与工程学院
- 华中科技大学船舶与海洋工程学院
- 华中系统数控铣床和加工中心培训教程
- 华为 C8500 ROM
- 华为 E5II
- 华为 PixLab X1 激光打印机
- 华为 S3700-52P-EI(AC)
- 华为 S6720S-26Q-EI-24S-AC
- 华为喵王
- 华为喵王 E5730S
- 中国(太原)煤炭交易中心煤炭现货交易规则(试行)
- 怎样确定消火栓的保护半径和消防水枪的充实水柱长度
- 关于不规则隔震结构建筑方案在地震作用下讨论
- 关于发布起重机械定期检验规则第1号修改单公告
- 公路工程工程量清单计量规则编制说明
- 广东省建筑工程综合定额2006说明及工程量计算规则
- 广东省定额说明及工程量计算规则(土建工程)
- 广东省建筑工程综合定额说明及工程量计算规则知识交流
- 广东省市政工程综合定额说明和工程量计算规则
- 广东省市政工程综合定额说明及工程量计算规则
- 广东省建筑与装饰工程定额(2010)说明及计算规则
- 基于RENESAS半导体单相远程费控智能电表设计
- 基于LIDAR数据建筑轮廓线提取及规则化算法
- 混凝土结构施工图平面整体表示方法制图规则和构造详图
- 某半地下车库基坑围护(土钉墙深层搅拌桩)施工方案
- 基于三角模糊数模糊群决策方法在供应商选择中应用
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
拆边机
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司