WS1-10挖掘机全数字直流电控
WS1-10挖掘机全数字直流电控采用美国艾默生英国CT公司生产的MentorⅡ四象限全数字直流电机驱动器和西门子或三菱公司的PLC可编程序控制器为核心组成的提升、推压、回转/行走供电调速系统,用可控硅整流技术替代原来笨重和庞大的高压异步电动机拖动三台直流发电机组的调速系统。驱动器内部通过软件进行参数设置,实现双闭环调速系统,外部没有反馈接线,从而大大简化了产品原理图。
采用美国艾默生英国CT公司生产的MentorⅡ四象限全数字直流电机驱动器和西门子或三菱公司的PLC可编程序控制器为核心组成的提升、推压、回转/行走供电调速系统,用可控硅整流技术替代原来笨重和庞大的高压异步电动机拖动三台直流发电机组的调速系统。驱动器内部通过软件进行参数设置,实现双闭环调速系统,外部没有反馈接线,从而大大简化了产品原理图。
·新产品的创新点及主要特点:
(1)对容量较大的10立方米电铲采用全自动无功补偿装置,有效的提高了功率因数,经现场测试功率因数可达0.85以上。同时抑制了多次谐波的影响。
(2)科技含量高,响应速度快,系统特性硬,生产效率高。提高作业率增加产量。
(3)节约电能、减少维修费用。
(4)机棚内噪音大大降低,极大地改善了电铲司机的工作环境。
WS1-10挖掘机全数字直流电控造价信息
WS1-10挖掘机全数字直流电控常见问题
-
最稳定可靠的方法是使用集成稳压IC ,可用型号为78l03,其输出电流能力为1安以上,实际上大部分电子产品都是采用此方案,制作成本在二元以下,至于用变压器的方案根本不实用,电阻分压更加行不通,因为它带...
-
要看你的电机转速的
-
亲测,是直流电,(极性与电机的转向有关,示波器显示,输出波形与交流电全波整流后的波形类似,但是仅限有刷电机,无刷的我就不知道了。可能有人会好奇这是为什么,这是因为有电刷的存在,它将内部的产生的交流电整...
WS1-10挖掘机全数字直流电控文献

 挖掘机电控成套设备WS1B-8型
挖掘机电控成套设备WS1B-8型
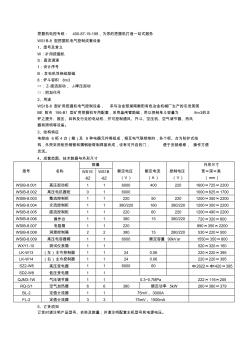
挖掘机电控专线: 400-87-19-199,为您的挖掘机打造一站式服务 WS1B-8 型挖掘机电气控制成套设备 1、型号及含义 W:矿用挖掘机 S:直流调速 1:设计序号 B:发电机双绕组励磁 8:铲斗容积 8m3 □: Z-直流起动, J-降压起动 □:附加代号 2、用途 WS1B-8 型矿用挖掘机电气控制设备, 系与冶金部湖南衡阳有色冶金机械厂生产的引进美国 BE 股市 195-B1 型矿用挖掘机专用配套,采用晶闸管励磁,用以控制单斗容量为 8m3的正 铲之提升、推压、回转及行走的电动机,并可控制通风、开斗、空压机、空气调节器、热风 器和照明等设备。 3、结构特征 电控由 6 柜 4 台(箱)及 8 种电器元件等组成,相互电气联锁制约,各个柜、台为防护式结 构,外壳采用矩形钢管和薄钢板弯制焊接而成,设有可开启的门, 便于安装维修, 操作方便 灵活。 4、成套范围、技术数据与外形尺寸

WS1-4(10)ab 全数字支流调速控制设备 系专与露天矿山,水利工程广为应用的电铲的配套控制设备,可以控制单斗容量为4M或10M的正铲提升、推压、回转及行走等电动机,并可控制通风、开斗电动机、空压机、空气调节器、自动润滑装置和照明设备。
F-D串机组方式
F-D串机组方式即交流原动机(主电机)-直流发电机组励磁控制方式,系统技术装备水平为五十到六十年代水平,其特点是:
a. 采用传统的点对点的硬件接线方式,控制方式复杂,系统中间继电器和
接触器、自动开关多、故障点多,可靠性差。
b. 由于挖土机特有的运行特性,系统常处于过流运行状态,磁场调节难以
控制,因此,故障率高。
c. 由于存在能量转换的中间过程(电-机-电转换)和空载待机过程,电能
损耗大。系统时间常数大,影响灵敏度。
d. 维护方式复杂(更换发电机,需要多工种及起重、运输工具的协作),
排查处理故障困难,维护费用过高。
e. 操作环境恶劣,车内震动和噪音大,温度高。
全数字化电气控制系统控制方式
全数字化电气控制系统控制方式,系统技术装备水平为九十年代中、后期
水平,其特点是:
a. 取消串机组和原直流控制屏,用全数字化直流驱动装置直接控制直流电
机,系统不存在能量转换中间过程,节能效果明显(20%)。
b. 整个控制过程由可编程控制器(PLC)或现场总线系统通过控制与算法软
件替代硬件的方式来实现,以减少硬件接线和故障点,并提高抗扰动性,控制
信号由32位微处理器处理,通过面板快速访问参数,具有控制、监测、保护和
通讯功能。
c. 系统特性硬、出力大,使生产效率大大提高。
d. 系统具备完善的保护功能、故障诊断功能,能可靠有效的保护电动机,
当系统出现故障时可根据故障提示功能迅速排除,保证生产的连续性,维护方
式简单。
e. 由于没有机组的噪音、震动和运用了操作软件,大大的改善了操作环境
。
f. 电铲的操作习惯、操作工艺和机械部分工艺不变,司机室各主令开关点
以无源点直接进PLC或现场总线远程I/O站点。
g. 个斗容挖掘机上各种容量的全数字化驱动器的结构由主板、功放板和功
率元件组成,主板与功放板各种容量全部通用,功率元件根据容量选用不同。
用户生产备件率很低。
h. 由于采用可控硅整流电路,其功率因数和谐波分量会对电网产生一定程
度的影响,当整流负载达到一定程度时,需要采取措施消除谐波分量的影响和
补偿功率因素。
第1章卡特挖掘机液电控制系统的发展
11卡特挖掘机概述
12卡特系列挖掘机特点
121D系列挖掘机的特点
122卡特320C型挖掘机的特点
13液电控制系统的使用维护
131液压控制系统的维护
132电控系统的维护
14挖掘机液压系统的维护保养
第2章卡特挖掘机电脑控制系统
21电脑控制概述
22卡特液电控制系统
221发动机转速控制
222自我诊断功能
223单触点低怠速
224发动机转速保护
225液压泵调节控制
226冷却风扇控制
227行走速度控制
228回转制动操作
229重物提升控制模式(选用)
2210备用系统
2211监控器
23液电故障的含义
24液电控制组件
第3章卡特液压泵液电控制系统
31液压泵的结构原理
311液压泵构造
312液压泵控制系统
32液压泵的液电控制系统
321液压泵流量和压力控制系统
322电子控制系统
323先导液压系统
324先导系统液压装置
33液压泵的性能测试
331液压泵的测试(恒功率流量控制)
332泵控制系统(输出流量)的测试
333液压泵最大输出流量的调整
334泵控制系统(反向流量)的测试
34液压泵常见故障诊断与排除
35液压泵维修的调整
351液压泵的排除气体
352压力技术规格
353主安全阀的临时调定
354安全阀(先导)的测试与调整
355安全阀(主)的测试与调整
第4章控制阀的液电控制系统
41主控制阀液电控制
411主控制阀简述
412液压缸液电系统
413主控制阀的拆卸与组装
414主控制阀液电控制故障诊断与排除
42先导控制的结构与维修
421手控先导阀
422行走先导阀的拆解
423行走先导阀的组装
424先导阀的故障诊断与排除
第5章卡特回转、行走马达液电控制系统
51液压马达概述
52回转装置液电控制
521回转马达液电控制的结构原理
522回转马达液电控制系统
523回转装置的拆卸与组装
53行走装置的液电控制系统
531终传动的构造与原理
532行走系统的液电控制
533行走装置的拆卸与组装
534液压马达的维修
54液压缸液电控制系统
541液压缸结构
542液压缸故障诊断与排除
第6章液压辅助元件
61液压油箱与热交换器
611液压油箱
612热交换器
62过滤器
63蓄能器
64油管与管接头
65中心回转接头
66密封装置
第7章卡特挖掘机液电控制系统故障诊断与排除
71故障诊断与排除的初步程序
72液电控制系统的故障诊断
73故障维修模式的诊断程序
74卡特320C型挖掘机电脑控制系统
75故障诊断与排除
76挖掘机工作装置性能的测试与调整
761测试前的准备
762斗杆油缸的调整
763铲斗油缸的调整
764动臂油缸的调整
765回转安全阀的测试与调整
766行走装置的测试与调整
欢迎订阅工程机械类图书 2100433B
WS1-10挖掘机全数字直流电控相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 小型台式自动锁螺丝机
- 十字槽盘头自钻自攻螺钉
- 方头长圆柱端紧定螺钉
- 儿女墙
- 马桶盖板膨胀螺丝
- 十字槽凹穴六角头自攻螺钉和大垫圈组合件
- 沉头双榫螺栓
- 球磨机螺栓
- 304HC不锈钢螺丝线材
- 三角形螺丝刀
- 吊环螺钉
- 大悲院
- 波珠螺丝
- 钢结构高强度螺栓连接技术规程
- 开槽圆柱头轴位螺钉
- t型槽用螺栓
- 在全县非煤矿山和危化企业安全生产工作会议上的讲话
- 以MSP430FW427为核心的远程数字水表设计
- 云南省昆明市建设局建筑工程深基坑施工安全管理规定
- 招远电视台制作播出系统数字化改造工程的设计与实践
- 全热回收地源热泵空调机组的系统及工程方案设计
- 云南省城镇照明工程安全生产规程(修订征求意见稿)
- 岳阳信息价,最新最全岳阳工程造价信息网信息价下载
- 云浮建筑施工领域安全管理联合执法检查专项行动方案
- 新型自行式全旋转桥梁检修车在桥梁工程中的应用
- 月份安全工作总结(20200812144457)
- 有关建设工程施工安全涉及常用法律法规标准规范清单
- 智能材料系统与结构工程构造安全监控
- 中国式驾驶室安全标准出台 或将导致卡车行业洗牌
- 云南某水电站水库一期蓄水安全鉴定工程施工自检报告
- 幼儿园教室坍塌事件中谈施工相邻影响及房屋安全检测
- 张能2号附件安全标准化管理考评评分细则-矿井-3
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
拆边机
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
电梯平层准确度
建设部关于开展城市规划动态监测工作的通知
广州利好来电气有限公司
四川中泽盛世招标代理有限公司