AGV
AGV是(Automated Guided Vehicle)的缩写,意即"自动导引运输车",是指装备有电磁或光学等自动导引装置,它能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人(WMR――Wheeled Mobile Robot)的范畴,AGV主要三项技术:铰链结构、发动机分置技术和能量反馈。

AGV基本信息
| 中文名称 | 自动导引运输车/无人搬运车 | 外文名称 | AGV |
|---|---|---|---|
| 英文 | Automated Guided Vehicle | 法语 | Automotrice à grande vitesse |

AGV系统
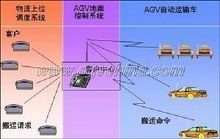

AGV系统的控制是通过物流上位调度系统、AGV地面控制系统及AGV车载控制系统三者之间的相互协作完成的,对该系统的理解,有一个非常恰当而通俗易懂的例子:
假设某市有一家出租车公司,该公司管理先进,每辆出租车都装全球定位系统(GPS),这样在公司的监控中心就可以清楚地知道每辆车的位置及行驶路线,司机可通过无线通信随时向公司汇报此时车辆的载客情况。
当有客户需要乘坐出租车时,客户可以打电话到出租车公司的客户中心,说明他当前所在的位置,以及要到达的目的地,这里,我们可将客户的电话理解为来自物流调度系统的需求,出租车公司的客户中心理解为AGV的地面控制系统,即AGV系统的上位。
客户中心收到客户的电话后,可以通过无线电话与出租车司机联系,选择离客户最近,又正好空闲的车辆A前往接客,就像AGV的地面控制系统进行的车辆和任务分配;在车辆A前往接客的途中,客户中心可能又接到报告,有空闲车辆B离客户更近,那么客户中心将及时通知车辆B去接客户,取消车辆A的任务,这就是AGV地面控制系统的动态车辆调度。客户中心对出租车将要行驶道路的交通状况也了如指掌,能够及时通知各个司机选择最便捷的道路行驶,该道路所需时间最短,但不一定是路程最短,因为,最近路程的道路上可能发生了交通阻塞,这就是AGV地面系统中所完成的路径搜索和路径分配的工作。
AGV系统的控制过程就类似这样一家管理先进的出租车公司,物流上位调度系统、AGV地面控制系统和AGV车载控制系统分别相当于客户、客户中心和出租车司机,AGV地面控制系统和各台AGV之间通过无线通信来交换信息,调度AGV的作业,并为其选择路径(线),确保交通通畅。AGV是以电池为动力的,当电量不足时,会向地面控制系统发出充电请求,在得到允许后,前往充电站自动充电,在充电期间,AGV地面控制系统不会向此AGV分配任何任务,就与出租车进了加油站不再载客一样。
系统构成
曾有国外专家对AGV控制系统需解决的主要问题做了恰当的比喻:Where am I? (我在哪里?)Where am I going?(我要去哪里?) How can I get there?(我怎么去?),这三个问题归纳起来分别就是AGV控制系统中的三个主要技术:AGV的导航(Navigation),AGV的路径规划(Layout designing),AGV的导引控制(Guidance)。为了能够解决好这些问题,AGV系统的构成也必然复杂:
AGV控制系统分为地面(上位)控制系统、车载(单机)控制系统及导航/导引系统,其中,地面控制系统指AGV系统的固定设备,主要负责任务分配,车辆调度,路径(线)管理,交通管理,自动充电等功能;车载控制系统在收到上位系统的指令后,负责AGV的导航计算,导引实现,车辆行走,装卸操作等功能;导航/导引系统为AGV单机提供系统绝对或相对位置及航向。
AGV系统是一套复杂的控制系统,加之不同项目对系统的要求不同,更增加了 系统的复杂性,因此,系统在软件配置上设计了一套支持AGV项目从路径规划、流程设计、系统仿真(Simulation)到项目实施全过程的解决方案。上位系统提供了可灵活定义AGV系统流程的工具,可根据用户的实际需求来规划或修改路径或系统流程;而上位系统也提供了可供用户定义不同AGV功能的编程语言。
地面控制系统
AGV地面控制系统(Stationary System)即AGV上位控制系统,是AGV系统的核心。其主要功能是对AGV系统(AGVS)中的多台AGV单机进行任务分配,车辆管理,交通管理,通讯管理等。
任务管理:任务管理类似计算机操作系统的进程管理,它提供对AGV地面控制程序的解释执行环境;提供根据任务优先级和启动时间的调度运行;提供对任务的各种操作如启动、停止、取消等。
车辆管理:车辆管理是AGV管理的核心模块,它根据物料搬运任务的请求,分配调度AGV执行任务,根据AGV行走时间最短原则,计算AGV的最短行走路径,并控制指挥AGV的行走过程,及时下达装卸货和充电命令。
交通管理:根据AGV的物理尺寸大小、运行状态和路径状况,提供AGV互相自动避让的措施,同时避免车辆互相等待的死锁方法和出现死锁的解除方法;AGV的交通管理主要有行走段分配和死锁报告功能。
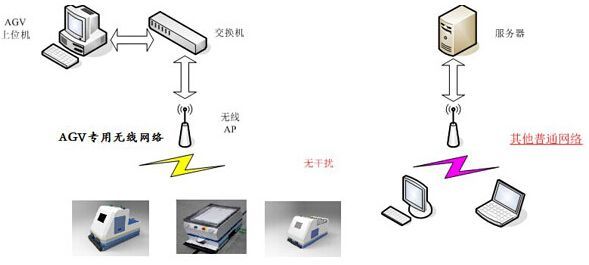
通讯管理:通信管理提供AGV地面控制系统与AGV单机、地面监控系统、地面IO设备、车辆仿真系统及上位计算机的通信功能。和AGV间的通信使用无线电通信方式,需要建立一个无线网络,AGV只和地面系统进行双向通信,AGV间不进行通信,地面控制系统采用轮询方式和多台AGV通信;与地面监控系统、车辆仿真系统、上位计算机的通信使用TCP/IP通信。
车辆驱动:小车驱动负责AGV状态的采集,并向交通管理发出行走段的允许请求,同时把确认段下发AGV。
车载控制系统
AGV车载控制系统(Onboard System),即AGV单机控制系统,在收到上位系统的指令后,负责AGV单机的导航,导引,路径选择,车辆驱动,装卸操作等功能。
导航(Navigation):AGV单机通过自身装备的导航器件测量并计算出所在全局坐标中的位置和航向。
导引(Guidance):AGV单机根据现在的位置、航向及预先设定的理论轨迹来计算下个周期的速度值和转向角度值即,AGV运动的命令值。
路径选择(Searching):AGV单机根据上位系统的指令,通过计算,预先选择即将运行的路径,并将结果报送上位控制系统,能否运行由上位系统根据其它AGV所在的位置统一调配。AGV单机行走的路径是根据实际工作条件设计的,它有若干"段"(Segment)组成。每一"段"都指明了该段的起始点、终止点,以及AGV在该段的行驶速度和转向等信息。
车辆驱动(Driving):AGV单机根据导引(Guidance)的计算结果和路径选择信息,通过伺服器件控制车辆运行。
导航导引方式
AGV之所以能够实现无人驾驶,导航和导引对其起到了至关重要的作用,随着技术的发展,目前能够用于AGV的导航/导引技术主要有以下几种:
1 直接坐标 (Cartesian Guidance)
用定位块将AGV的行驶区域分成若干坐标小区域,通过对小区域的计数实现导引,一般有光电式(将坐标小区域以两种颜色划分,通过光电器件计数)和电磁式(将坐标小区域以金属块或磁块划分,通过电磁感应器件计数)两种形式,其优点是可以实现路径的修改,导引的可靠性好,对环境无特别要求。缺点是地面测量安装复杂,工作量大,导引精度和定位精度较低,且无法满足复杂路径的要求。
2 电磁导引(Wire Guidance)
电磁导引是较为传统的导引方式之一,目前仍被许多系统采用,它是在AGV的行驶路径上埋设金属线,并在金属线加载导引频率,通过对导引频率的识别来实现AGV的导引。其主要优点是引线隐蔽,不易污染和破损,导引原理简单而可靠,便于控制和通讯,对声光无干扰,制造成本较低。缺点是路径难以更改扩展,对复杂路径的局限性大。
3 磁带导引 (Magnetic Tape Guidance)
与电磁导引相近,用在路面上贴磁带替代在地面下埋设金属线,通过磁感应信号实现导引,其灵活性比较好,改变或扩充路径较容易,磁带铺设简单易行,但此导引方式易受环路周围金属物质的干扰,磁带易受机械损伤,因此导引的可靠性受外界影响较大。
4 光学导引(Optical Guidance)
在AGV的行驶路径上涂漆或粘贴色带,通过对摄像机采入的色带图象信号进行简单处理而实现导引,其灵活性比较好,地面路线设置简单易行,但对色带的污染和机械磨损十分敏感,对环境要求过高,导引可靠性较差,精度较低。
5 激光导航(Laser Navigation)
激光导引是在AGV行驶路径的周围安装位置精确的激光反射板,AGV通过激光扫描器发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和航向,并通过连续的三角几何运算来实现AGV的导引。
此项技术最大的优点是,AGV定位精确;地面无需其他定位设施;行驶路径可灵活多变,能够适合多种现场环境,它是目前国外许多AGV生产厂家优先采用的先进导引方式;缺点是制造成本高,对环境要求较相对苛刻(外界光线,地面要求,能见度要求等),不适合室外(尤其是易受雨、雪、雾的影响)。
6 惯性导航 (Inertial Navigation)
惯性导航是在AGV上安装陀螺仪,在行驶区域的地面上安装定位块,AGV可通过对陀螺仪偏差信号(角速率)的计算及地面定位块信号的采集来确定自身的位置和航向,从而实现导引。
此项技术在军方较早运用,其主要优点是技术先进,较之有线导引,地面处理工作量小,路径灵活性强。其缺点是制造成本较高,导引的精度和可靠性与陀螺仪的制造精度及其后续信号处理密切相关。
7 视觉导航 (Visual Navigation )
8 GPS(全球定位系统)导航 (Global Position System)
通过卫星对非固定路面系统中的控制对象进行跟踪和制导,目前此项技术还在发展和完善,通常用于室外远距离的跟踪和制导,其精度取决于卫星在空中的固定精度和数量,以及控制对象周围环境等因素。
由此发展出来的是iGPS(室内GPS)和dGPS(用于室外的差分GPS),其精度要远远高于民用GPS,但地面设施的制造成本是一般用户无法接受的。
AGV造价信息
早期AGV小车自动运行时只能单向行驶,因而适用环境受到局限。为了满足工业生产的要求,近年来国外已有在自动运行时能前进和后退甚至全方位行驶、前进、后退、侧向和旋转的AGV产品,这些成就归功于行走机构的进步。
1、两轮差速的行走机构 这种行走机构两行走驱动车轮对称布置在前后中线上两支承轮前后分别布置在以两行走轮支点为底边的等腰三角形顶点处。小车靠两侧行走驱动轮差速转向因此不必设置舵轮。该小车机构简单、工作可靠、成本低。在自动运行状态下小车能做前进、后退行驶并能垂直转弯机动性好。和带舵轮的四轮行走机构小车相比该车由于省去了舵轮不仅可以省去两台驾驶马达还能节省空间小车可以做的更小些。近年来这种机构的小车得到广泛应用。 为了提高行驶时车体横向稳定性可将两轮差速的四轮行走机构做如下改进将支承轮由原来的两个增加到四个分别布置在小车底盘的四个角处。
2、三轮行走机构 三轮行走机构的AGV小车三个车轮分别布置在等腰三角形的三个顶点上前轮既是舵轮又是行走驱动轮后面两个车轮是无动力支承轮。三轮行走机构的AGV小车结构简单、控制容易、工作可靠、造价低。该车手动时可前进、后退和转弯自动运行时只能单向行驶转弯时后轮中点轨迹偏离导引线轮迹呈曳物线。
3、带舵轮的四轮行走机构 带舵轮的四轮行走机构是在三轮行走机构基础上演变过来的,它相当于把两个三轮车合并在一起两支承轮对称地布置在小车前后的中线上前后车轮分别对称布置在以两支承轮支点为底边的等腰三角形顶点处。前后车轮既是舵轮又是行走驱动轮。这种AGV小车在自动运行状态下可全方位行驶转弯时前后车轮均能跟踪导引线轨迹机动性比三轮车好适用于狭窄通道作业环境。
4、其它形式的行走机构 近年来国外公司不断研究出新的行走机构。其中最有代表性的属瑞典麦卡纳姆公司的行走机构。该行走机构设计新颖、机构紧凑四个驱动车轮以铰接形式分别布置在底盘的四个角上。运行时分别控制四个车轮的转向和转速利用速度矢量合成原理实现驾驶。后来日本三井公司与麦卡纳姆公司合作在原基础上做了改进推出了三井麦卡纳姆车轮系统,其性能比原来又有所提高。这种AGV小车可实现全方位行驶。
(1)自动化程度高;
由计算机,电控设备,激光反射板等控制。
当车间某一环节需要辅料时,由工作人员向计算机终端输入相关信息,计算机终端再将信息发送到中央控制室,由专业的技术人员向计算机发出指令,在电控设备的合作下,这一指令最终被AGV接受并执行--将辅料送至相应地点。
(2)充电自动化;
当AGV小车的电量即将耗尽时,它会向系统发出请求指令,请求充电(一般技术人员会事先设置好一个值),在系统允许后自动到充电的地方"排队"充电。
另外,AGV小车的电池寿命很长(10年以上),并且每充电15分钟可工作4h左右。
(3)美观,提高观赏度,从而提高企业的形象。
(4)方便,减少占地面积;生产车间的AGV小车可以在各个车间穿梭往复。
AGV常见问题
随着物流系统的迅速发展,AGV的应用范围也在不断扩展,AGV系统,研究设计一种基于电磁导航的无人驾驶小车系统方案.通过实际硬件实验,系统能够达到预期设计要求,能够广泛运用于工业、军事、交通运输、电子等领域,具有良好的环境适应能力,很强的抗干扰能力和目标识别能力。
领域
1.仓储业
仓储业是AGV最早应用的场所。1954年世界上首台AGV在美国的South Carolina州的Mercury Motor Freight公司的仓库内投入运营,用于实现出入库货物的自动搬运。目前世界上约有2万台各种各样AGV运行在2100座大大小小仓库中。海尔集团于2000年投产运行的开发区立体仓库中,9台AGV组成了一个柔性的库内自动搬运系统,成功地完成了每天23400的出入库货物和零部件的搬运任务。
2.制造业
AGV在制造业的生产线中大显身手,高效、准确、灵活地完成物料的搬运任务。并且可由多台AGV组成柔性的物流搬运系统,搬运路线可以随着生产工艺流程的调整而及时调整,使一条生产线上能够制造出十几种产品,大大提高了生产的柔性和企业的竞争力。1974年瑞典的Volvo Kalmar轿车装配厂为了提高运输系统的灵活性,采用基于AGVS为载运工具的自动轿车装配线,该装配线由多台可装载轿车车体的AGVS组成,采用该装配线后,装配时间减少了20%,装配故障减小39%,投资回收时间减小57%,劳动力减小了5%。目前,AGV在世界的主要汽车厂,如通用、丰田、克莱斯勒、大众等汽车厂的制造和装配线上得到了普遍应用。
近年来,作为CIMS的基础搬运工具,AGV的应用深入到机械加工、家电生产、微电子制造、卷烟等多个行业,生产加工领域成为AGV应用最广泛的领域。
3.邮局、图书馆、港口码头和机场
在邮局、图书馆、码头和机场等场合,物品的运送存在着作业量变化大,动态性强,作业流程经常调整,以及搬运作业过程单一等特点,AGV的并行作业、自动化、智能化和柔性化的特性能够很好的满足上式场合的搬运要求。瑞典于1983年在大斯得哥尔摩邮局、日本于1988年在东京多摩邮局、中国在1990年于上海邮政枢纽开始使用AGV,完成邮品的搬运工作。在荷兰鹿特丹港口,50辆称为"yard tractors"的AGV完成集装箱从船边运送到几百码以外的仓库这一重复性工作。
4.烟草、医药、食品、化工
对于搬运作业有清洁、安全、无排放污染等特殊要求的烟草、医药、食品、化工等行业中,AGV的应用也受到重视。在国内的许多卷烟企业,如青岛颐中集团、玉溪红塔集团、红河卷烟厂、淮阴卷烟厂都应用了激光引导式AGV完成托盘货物的搬运工作。
5.危险场所和特种行业
在军事上,以AGV的自动驾驶为基础集成其他探测和拆卸设备,可用于战场排雷和阵地侦察,英国军方正在研制的MINDER Recce是一辆侦察车,具有地雷探测、销毁及航路验证能力的自动型侦察车。在钢铁厂,AGV用于炉料运送,减轻了工人的劳动强度。在核电站和利用核辐射进行保鲜储存的场所,AGV用于物品的运送,避免了危险的辐射。在胶卷和胶片仓库,AGV可以在黑暗的环境中,准确可靠的运送物料和半成品。 行车AGV行车
对AGV行驶区域的环境进行图象识别,实现智能行驶,这是一种具有巨大潜力的导引技术,此项技术已被少数国家的军方采用,将其应用到AGV上还只停留在研究中,目前还未出现采用此类技术的实用型AGV。
可以想象,图象识别技术与激光导引技术相结合将会AGV更加完美,如导引的精确性和可靠性,行驶的安全性,智能化的记忆识别等都将更加完美。
术语
自动导引运输车(AGV) Automated Guided Vehicle
是指装备有电磁或光学等自动导引装置,由计算机控制、轮式移动为特征、并且能够沿规定的导引路径自动行驶的运输车辆。AGV可具有安全防护、移载(装卸)等多种功能。
自动导引运输车系统(AGVS) AGV System
具备自动导引运输车特性的一整套系统,一般包括数量不等的AGV车辆,上位控制系统,导航系统,通讯系统和充电系统等。
车载控制系统 Onboard control system
用于AGV车辆的计算机控制软件及其相关器件的总称。
上位控制系统 Host control system
用于AGV调度系统的计算机控制软件及其相关器件的总称。
无人驾驶 Driverless
AGV的主要特性之一。
系统能力 System capacity
AGV系统在单位时间内能够实现的最大的搬运能力。
系统可靠性 System reliability
AGV系统正常工作时间所占工作总时间的百分比,由于多台AGV处在并行工作模式中,其中一台发生故障的时间权值为1/n,n为系统中AGV的总台数。
地面固定设备 Stationary equipment
在AGV系统中,用于上位控制,导航/导引,通讯,充电等设备的总称。
反射板 Reflector
在激光导引AGV系统中使用的导航或导引标识物。
平面反射板 Flat reflector
反射板的一种类型,反射面为平面
柱状反射板 Column reflector
反射板的一种类型,反射面为柱面
定位标志 Position mark
AGV在停车定位时使用的标识物。
磁带 Magnetic tape
用于磁带导引AGV系统的地面导引设施,一般是沿AGV的行驶路径将其粘贴于地板表面。
导引线 Wire
用于电磁导引AGV系统的地面导引设施,一般是沿AGV的行驶路径将其埋于地下。
反光带 Reflective tape
用于光学导引AGV系统的地面导引标识,按导引传感器的特点,沿AGV的行驶路径喷涂或粘贴相应颜色的色带。
感光带 Sensitive tape
用于光学导引AGV系统的地面导引标识,按导引传感器的特点,沿AGV的行驶路径粘贴或喷涂相应的化学感光材料。
磁钉 Magnet
定位标识的一种,用磁性材料做成。
频率发生器 Frequency generator
用于电磁导引AGV系统的地面导引设施,能够将特定的频率加载至导引线上。
无线接入点 Wireless access point
以无线局域网方式进行通讯的固定通讯设备。
无线调制解调器 Radio modem
以射频(RF)方式进行通讯的通讯设备。
无线局域网 Wireless LAN
用于AGV车辆和上位控制系统通讯的网络。
充电站 Charging Station
用于AGV车辆充电的设备及地点的总称。
充电连接器 Charging connector
用于AGV车辆充电连接的器件(包括地面和车载)。
物流调度系统服务器Logistic system server
用于运行物流调度系统的计算机。
AGV调度系统服务器AGV dispatch system server
用于运行AGV调度系统的计算机。
数据库服务器 Data base sever
为AGV调度系统存储数据。
关联设备 Correlative equipment
与AGV系统相关的外部设备,一般是指与AGV协作完成装卸货操作的设备。
物流调度系统 Logistic system
AGV系统的上位控制系统,AGV系统的任务可由此系统产生。
AGV调度系统 AGV dispatching system
调度任务执行、车辆分配、路径分配及交通管制的控制软件。
热启动 Warm start
AGV调度系统在上一次退停止时保存的运行状态数据的基础上启动执行。
冷启动 Cold start
AGV调度系统启动执行,重新进行系统初始化。
系统控制接口 System Control Interface
AGV系统向外界提供的控制接口,使得它能够被集成到更大的系统中。
图形监控 Graphical monitor
以图形化的方式提供对整个AGV系统运行情况的查询和人工干预。
通信协议 Communication protocol
AGV调度系统和AGV车辆通信使用的通信协议。
通信丢失 Lost communication
AGV调度系统和AGV车辆出现通信中断,调度系统无法得到AGV车辆状态。
通信频道 Communication channel
通信设备使用的频道。
主机地址 Host IP address
运行AGV调度系统的服务器使用的IP地址。
主机端口 Host port
运行AGV调度系统的服务器监听端口。
自动充电 Auto charging
AGV车辆在AGV调度系统的控制下进行充电。
手动充电 Manual charging
AGV车辆在操作人员的控制下进行充电,包括人工指令和手动更换电池两种方式。
柔性 Flexibility
AGV系统能够应对各种各样的流程变化或扩展。
日志 Log
用于存储系统运行时发生的重要事件、错误等信息。
工作流程 Work-flow
AGV调度系统执行任务时采用的工艺流程。
简单流程 Simple work-flow
在AGV的一个搬运任务中,只有一次装货,一次卸货。
复杂流程 Complex work-flow
在AGV的一个搬运任务中,有多次装货或卸货。
任务 Order
需要AGV调度系统处理的工作。
任务属性 Order property
任务具有的一些特征性质。
搬运起点 Pickup point
AGV装货的地点。
搬运终点 Delivery point
AGV卸货的地点。
任务调度 Order schedule
AGV调度系统为正在执行的多个任务分配执行时间等资源。
任务优先级 Order priority
任务执行时间和车辆分配的优先级。
任务流程 Order work-flow
任务执行时使用的工作流程。
任务取消 Order cancel
AGV调度系统取消正在执行中的任务,结束任务的执行。
任务变更 Order alter
AGV调度系统变更正在执行中的任务的搬运起点、搬运终点。
最大任务调度量 Maximum number of scheduling order
AGV调度系统能够调度任务的最大数量。
任务周期 Order life time
任务从生成到结束的时间。
任务响应时间 Order response time
任务从生成到AGV开始执行任务的时间。
任务执行时间 Order execute time
任务从开始执行到任务结束的时间。
任务统计 Order statistics
对AGV调度系统中产生的任务数据进行收集、分析、解释和表述。
计划任务 Schemed order
AGV调度系统根据计划自动在特定时间启动的任务。
物流调度系统任务 Host order
AGV调度系统根据物流调度系统的命令启动的任务。
人工任务 Manual order
AGV调度系统根据操作人员的命令启动的任务。
触发任务 Trigged order
由某个外部条件触发AGV调度系统启动的任务。
任务查询 Order query
向AGV调度系统询问任务的执行情况。
任务执行纪录 Order execute record
AGV调度系统纪录的任务执行状态和结果。
优先模式 Priority mode
AGV调度系统优先执行任务的模式。
复合任务 Combine order
AGV调度系统通过对任务的优化,可将多个任务结合在一起成为一个复合任务。
充电任务 Charge Order
AGV调度系统指挥AGV车辆进行充电的任务。
AGV运行模式 AGV running mode
AGV运行时的一些标准模式,如:手动,自动,半自动
AGV调度 AGV schedule
AGV调度系统根据系统当前的情况安排AGV执行任务和行驶。
AGV分配 AGV assignment
以一定的优化原则将AGV调度系统中的任务分配给各台AGV。
正常工作率 AGV health rate
AGV无故障工作的时间除以AGV开机时间。
使用率 AGV working rate
AGV执行任务的时间除以AGV正常工作时间。
空跑率 AGV useless running rate
AGV为执行任务而空跑的时间除以AGV正常工作时间。
空闲率 AGV free time rate
AGV没有搬运任务,处于停止的时间除以正常工作时间。
路径搜索 Route search
AGV调度系统在规划地图中搜索从搬运起点到搬运终点的路径。
最短路径 The shortest route
规划地图中从搬运起点到搬运终点的最短路径。
路径规划 Layout
根据实际的AGV应用环境,为AGV设计规划行驶的路线。
点 Point
用于AGV车辆正常停车的地点。
节点Node
指路径规划地图上的分流点及合流点。
待命点 Wait point
空闲AGV等待命令的点。
自动插入点 Auto insert point
AGV进行自动插入的点,从而确定自身的位置。
避让点 Evading point
AGV车辆之间进行相互避让的点。
通信点 Communication point
AGV和AGV调度系统之间进行通信的点。
段 Segment
AGV车辆严格遵照行驶的点和点之间的轨迹路线。
直线段 Linear segment
几何形状是直线的段。
曲线段 Curving segment
几何形状是曲线的段。
站台 Station
用于AGV车辆执行操作(如装卸,充电等)的设备和地点。
装货站台 Pickup station
用于辅助AGV车辆进行装货的设备或地点。
卸货站台 Delivery station
用于辅助AGV车辆进行卸货的设备或地点。
复合站台 Combined station
AGV车辆既能够进行装货又卸货的站台。
交通管制 Traffic control
AGV调度系统对多台AGV车辆运行时的交通进行实时的管理和控制。
交通阻塞 Traffic block
行驶路线被别的AGV车辆或物体占用,导致AGV停车等待,称为交通阻塞。
死锁 Dead lock
AGV车辆向AGV调度系统请求不可能得到的路径资源。
合流 Confluence
在路径规划地图上,多条路径汇合成为一条路径。
分流 Diffluence
在路径规划地图上,一条路径分开成为多条路径。
导引模式 Guidance mode
AGV车辆采用的导航方式或导引算法
导航 Navigation
确定AGV车辆在全局坐标系中的位置及航向
导引 Guidance
按路径所提供的目标值计算出实际控制命令值,即给出AGV车辆的设定速度和转向角。
电磁导引 (Inductive) Wire Guidance
以电磁传感器获取导引信息,以定位传感器获取相对位置的导引模式。
磁带导引 Magnetic tape guidance
以磁带传感器获取导引信息,以定位传感器获取相对位置的导引模式。
光学导引 Optical guidance
以光学传感器获取导引信息,以定位传感器获取相对位置的导引模式。
坐标导引 Cartesian guidance
以光学、电磁传感器等传感器获取地面栅格信息,通过运算得到绝对位置信息的导引模式。
激光导航 Laser navigation
以激光扫描器获取反射板信息,通过三角几何运算得到绝对位置信息的导引模式。
惯性导航 Inertial navigation
以惯性器件(陀螺 Gyroscope)检测AGV的角速度,辅助以地面定位标识,从而获取绝对位置信息的导引模式。
视觉导航 Visual navigation
以视觉传感器获取运行区域的地理信息,通过运算得到绝对位置信息的导引模式。
全球定位系统(GPS)Global position system
通过卫星获取绝对位置信息的导引模式。
室内GPS (iGPS)Indoor GPS
通过接受室内安装航标塔发射的信号获取绝对位置信息的导引模式。
差分GPS (dGPS)Differential GPS
通过安装航标塔来修正卫星信号,而获取绝对位置信息的导引模式。
参考点 Reference point
运动学计算中,用于代表AGV车辆的某一点。
位置 Position
AGV车辆在全局坐标系中的坐标,既绝对位置,包括X坐标、Y坐标。
航向角 Orientation
AGV车辆全局坐标系中车头方向与X轴的夹角。
导引装置 Guidance equipment
用于获取AGV车辆导航、导引信息的装置。
激光扫描器 Laser scanner
用于激光导引AGV车辆获取导航、导引信息的器件。
定位传感器 Position sensor
用于AGV车辆进行位置修正或辅助定位的检测器件。
驱动模式 Driving mode
AGV车辆根据不同的运动学及动力学算法,可采用不同的驱动方法及驱动轮系布置方式。
驱动单元 Driving assembly
用于AGV车辆驱动及转向的机构总称。
驱动电机 Driving motor
用于AGV车辆驱动的电机。
转向电机 Steering motor
用于AGV车辆转向的电机。
单轮驱动兼转向(SD) Steering driving
只使用同一个驱动单元,其中同时包括驱动转向功能。
差速驱动(DIFF)Differential driving
使用两个不含转向的驱动单元,利用不同驱动单元速度的变化来完成驱动和转向功能。
全方位驱动(QUAD)Quad motion
使用两个或两个以上含有驱动及转向的驱动单元,使AGV车辆能够完成任意方向的平面运动。
单轮驱动 Sole-wheel driving
只有一套驱动单元的驱动方式。
双轮驱动 Dual-wheel driving
有两套驱动单元的驱动方式。
多轮驱动 Multi-wheel driving
有两套以上驱动单元的驱动方式。
车轮承载能力 Wheel load capacity
车轮能够承受的额定重量。
前进 Forward
AGV车辆沿车头方向向前运动。
后退 Backward
AGV车辆沿车头方向向后运动
侧移 Crabwise
AGV车辆保持航向不变,向两侧平行运动。
转弯 Turnning
是指改变AGV车辆的航向角。
自旋 Rotating
AGV车辆参考点处的转弯半径为0;通常是指差速或全方位驱动型AGV。
制动器 Braker
驱动电机或移载机构电机的刹车装置。
AGV文献

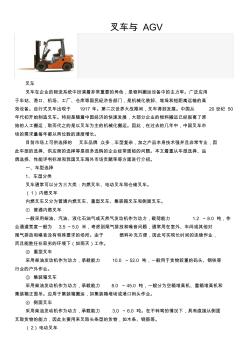 叉车与AGV.
叉车与AGV.
叉车与 AGV 叉车 叉车在企业的物流系统中扮演着非常重要的角色,是物料搬运设备中的主力军。广泛应用 于车站、港口、机场、工厂、仓库等国民经济各部门,是机械化装卸、堆垛和短距离运输的高 效设备。自行式叉车出现于 1917 年。第二次世界大战期间,叉车得到发展。中国从 20 世纪 50 年代初开始制造叉车。特别是随着中国经济的快速发展,大部分企业的物料搬运已经脱离了原 始的人工搬运,取而代之的是以叉车为主的机械化搬运。因此,在过去的几年中,中国叉车市 场的需求量每年都以两位数的速度增长。 目前市场上可供选择的 叉车品牌 众多,车型复杂,加之产品本身技术强并且非常专业,因 此车型的选择、供应商的选择等是很多选购的企业经常面临的问题。本文着重从车型选择、品 牌选择、性能评判标准和我国叉车海外市场贡献率等方面进行介绍。 一、车型选择 1、车型分类 叉车通常可以分为三大类:内燃叉车、电动叉车和仓储
 辅料库AGV系统的改造
辅料库AGV系统的改造
本文介绍了龙岩烟草工业有限公司辅料库AGV系统的改造过程与成果。辅料库AGV系统有5台小车,两台快速充电站,AGV小车的动力电池系统采用的是镍镉电池,电池重量较重且镍镉重金属污染有毒,存在过冲、穿刺等安全隐患,并且小车平均每条任务执行时间较长(小车走几个来回便产生充电需求),搬运效率较低。系统改造设计中,AGV小车使用了磷酸铁锂蓄电池组,通过单独的电池管理系统,管理电池均衡工作,防止电池过充、过放,延长电池寿命,同时对充电策略进行重新制定,保证小车在搬运任务期间不充电。改造后经检查与测试,本系统运行可靠、生产效率高。
目前AGV(无人搬运车)在仓储物流领域主要应用于货物的分拣和搬运。AGV代替了传统的人工搬运的方式,大为提高了企业的生产效率,改善了作业环境,提高了企业自动化生产水平,减轻企业人力成本压力。根据相关报告显示,预计2018年国内的智能物流系统市场规模将超过1,000亿元,行业复合增速将达到25.5%。预计到2025年有望超万亿,因而智能仓储已经是大势所趋,而智能AGV则是推动智能仓储的核心推手。
随着广大的仓储,近些年都在全力推进智能化升级与转型。传统的叉车方式,已经无法满足企业的需求与效率、成本等方面的诉求,为此AGV智能无人搬运车深得企业青睐。对于AGV厂商而言,唯有开发出性能强大、牢靠耐用,性价比高的AGV才能更快的抢夺市场,才能让更多的小微企业享受高品质的AGV。于是,很多AGV厂商在自己的产品中纷纷选择了集智达的AGV车载方案。
集智达无风扇嵌入式超薄型工控机GEA-X1,为AGV智能搬运车提供了超强的控制核心大脑和数据控制传输。

GEA-X1特点
(1)采用64位A53架构,低功耗、高性能;处理速度极快,可满足AGV地面控制系统的反应要求.
(2)工业级设计和验证,防灰尘、抗震、工作温度在-30度-50度,满足物流仓储环境。
(3)接口多,扩展性好。3x USB,1*OTG可选。
(4) 产品可靠度高,可连续24小时不间断运行,满足仓储与工厂长时间运行的可靠性。
(5) 支持4K高清
(6) 支持wifi、蓝牙、3G/4G传输、1G以太网
AGV无人搬运车,在现代仓储体系中的作用越来越重要,具有自动化程度高、灵敏、安全等优势,目前可在智能仓储中发挥重要作用。作为工控机行业的领导品牌之一,集智达积极打造满足技术要求的高可靠工控机助力AGV发展,全力推进仓储的智能化进程。
潜伏牵引式 AGV 自重 140kg 牵引重量 100~500kg 速度 0~48 m/min导引精度 10mm AGV 控制方式 自动/手动 AGV 导航方式 磁条导航 AGV 驱动方式 四轮驱动 运动方向 全向移动 避障方式 红外 机械避障 充电方式 自动充电、离线充电方式。
AGV自动导引车铝基板诚之益电路供应高性能高导热的LED铝基板、AGV自动导引车铝基板、铜基板(热电分离)、铜铝复合板等金属板的生产制造。公司拥有全套专业应用于生产金属板(铝基板、铜基板)的自动化生产设备和精密检测设备,10年专注于金属线路板的研发及制造。
诚之益电路公司成立于2004年7月份,旗下有MCPCB金属线路板制造公司和HDI/PCB高精密手机移植公司,总投资2500万,全体职员200余人,2016年成为国家高新技术企业单位,公司位于深圳市沙井街道后亭社区全至科技创新园大厦8楼www.czypcb.com

AGV自动导引车也叫AGV小车, AGV自动导引车,AGV搬运机器人,AGV自动导向搬运车,AGV无人搬运车,AGV自动送料车,AGV自动搬运车,AGV无人送料车,AGV自动牵引车,AGV无人牵引车,AGV小车的主要特点:
1、它是自动移动的输送机,不固定占用地面空间,改变运行路径比较容易。
2、AGV系统通过局域网协议与管理系统相连,是无人化车间、自动化仓库,实现物流自动化的最佳选择。
3、AGV主要用于各类型生产企业,为其进行物料和产品的搬送、装配及装配牵引、精物料架运输或替代往复不断的中间人力物流等,AGV产品,广泛应用于汽车制造、机械加工、电子、纺织、造纸、卷烟、食品、印刷、图书出版等行业。
其中一些型号的AGV产品先后出口到美国、韩国、墨西哥、印度、俄罗斯、加拿大等国家,开创了国产机器人出口的先河。
由于降低成本的压力一直贯穿于整个制造业和物料搬运行业,因此自动导引车(AGV)在生产过程中发挥着日益重要的作用。
AGV系统的控制是通过物流上位调度系统、AGV地面控制系统及AGV车载控制系统三者之间的相互协作完成的。
AGV小车的分类:分为潜伏式AGV,牵引式AGV,背负式AGV,台车式AGV,滚筒式AGV,SMT专用AGV. 装配型AGV 搬运型AGV。
AGV相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 环己基乙醇乙酸酯
- 遥控式手提车库
- 氘代乙醇-d6
- 钢芯铝绞线
- 全自动真空包装机
- 珀耳帖效应
- N-Boc-乙醇胺
- 380V
- 芦莉草叶
- 贴膜机
- 川黔润楠
- 乙醇-1-13C
- 闭路电视
- 压力开关
- 摇表
- 乙醇-2-氯碳酸酯(2:1)
- HSI图像分割的AGV道路标线中心线提取
- 叉车与AGV
- 辅料库AGV系统的改造
- 基于压电堆驱动器的喷嘴挡板式气体控制阀
- 电气工程及其自动化特色专业建设探索
- 分形DGS单元结构设计及其在微带电路中的应用
- 磷铵技术改造五大磷肥工程的建议
- 以大豆油多元醇制备的硬质聚氨酯泡沫塑料的性能
- 逆变TIG焊机接触引弧电路的设计(引弧电路)
- 预制砌块(砖、石)挡土墙工程砌体施工安全技术交底
- 应用模糊数学理论对公路工程建设项目方案的综合评价
- 引嫩工程扩建区土壤水盐动态与防治土壤盐碱措施
- 中华华丹雨、污水管道沟槽开挖专项施工方案教学教材
- 中国工程图学学会成立工程与制造系统集成化分会
- 中国吹制玻璃行业市场前景分析预测年度报告(目录)
- 可替代现有隔热保温材料的新型材料
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
上海地铁维护保障有限公司通号分公司
拆边机
甘肃中维国际招标有限公司
大山槟榔
舌花雏菊
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
华润燃气(上海)有限公司
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司