86系列两相步进电机技术数据

86系列两相步进电机技术数据
86两相步进电机技术数据
86系列两相步进电机造价信息

86系列两相步进电机概述
步距精度 5%
温 度 80℃ Max
环境温度 -20℃— 50℃
绝缘电阻 100M Ω Min 500VDC
耐 压 500V AC 1minute
径向跳动 最大0.02mm(450g负载)
轴向跳动 最大0.08mm(450g负载)
步进电机规格图表
| 型号 |
步距角 |
电机长度 |
保持转矩 |
额定电流 |
相电阻 |
相电感 |
转子惯量 |
电机重量 |
||
| Model |
Step Angle(°) |
LengthL(mm) |
Holding Torque(N.m) |
Current(A/Phase) |
Resistance(Ω) |
Inductance(mH) |
Rotor inertia |
Weight(Kg) |
||
| 四出线并联 |
四出线串连 |
六出线 |
||||||||
| BS86HB65-04 |
1.8 |
65 |
2.2 |
4.0 |
3.0 |
4.3 |
1.4 |
3.9 |
1000 |
1.7 |
| BS86HB80-04 |
80 |
3.3 |
6.0 |
3.0 |
4.2 |
0.8 |
3.5 |
1400 |
2.3 |
|
| BS86HB118-06 |
118 |
6.0 |
6.0 |
4.0 |
4.2 |
1.2 |
6.5 |
2700 |
3.8 |
|
86系列两相步进电机技术数据常见问题
-
你好,把电脉冲信号转变成直线位移或角位移的元件,每输入一个脉冲,步进电机就前进一步.因此,其直线位移或角位移与脉冲数成正比、
-
两相的是4线的,其中任意两根是一组线,称为A相和B相,出来的4根线分别接驱动器A A- B B-
-
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这...

86系列两相步进电机接线图

步进电机接线图
86系列两相步进电机技术数据文献

 两相步进电机控制系统毕业设计精品
两相步进电机控制系统毕业设计精品
毕业设计(论文) 基于 AT89S52单片机的两相步进电机控制系统 2013 年 6 月 13 日 东北大学秦皇岛分校毕业设计(论文) 第 I 页 基于 AT89S52单片机的两相步进电机控制系统 摘 要 本文应用 AT89S52单片机、步进电机驱动芯片 ULN2003A、字符型 LCD 液晶显示 屏和键盘阵列,构建了集步进电机控制器和驱动器为一体的步进电机控制系统。系统以 单片机作为步进电机的控制核心, 完成了步进电机的控制的硬件电路设计以及软件的设 计,实现了步进电机的启停、正反转,以及转速的实时显示。以三维工作台作为被控对 象,每个方向由一个步进电机驱动相应的滚珠丝竿机械装置进而实现完成了各个坐标方 向的精确运动,以此模拟实现切割机上下、前后的精确切割。由键盘模块实时键入相应 数值来控制三个坐标轴上各个步进电机的转速值、 行进距离以及运行状态, 并通过 LCD 液晶显示屏显示各个电机
 2极电机技术数据
2极电机技术数据
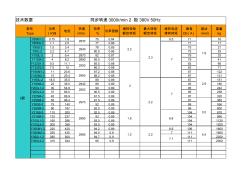
Y80M1-2 0.75 1.8 75 0.84 6.5 71 16 Y80M2-2 1.1 2.5 77 0.86 71 17 Y90S-2 1.5 3.4 78 0.85 75 21 Y90L-2 2.2 4.7 80.5 0.86 75 25 Y100L-2 3 6.4 2870 82 0.87 79 33 Y112M-2 4 8.2 2890 85.5 0.87 79 41 Y132S1-2 5.5 11.1 85.5 0.88 83 66 Y132S2-2 7.5 15 86.2 0.88 83 71 Y160M1-2 11 20.6 87.2 0.88 87 122 Y160M2-2 15 29.4 88.2 0.88 87 131 Y160L-2 18.5 35.5 89 0.89 87 151 Y180M-2 22 39.5 2940 89 0.89 92 180 Y200
110两相步进电机技术数据:2100433B
86系列山洋电机技术数据
步距精度 5%
温度 80℃ Max
环境温度 -20℃— 50℃
绝缘电阻:100M Ω Min 500VDC
耐 压 500V AC 1minute
径向跳动 最大0.02mm(450g负载)
轴向跳动 最大0.08mm(450g负载)
86系列两相步进电机相关推荐
- 相关百科
- 相关知识
- 相关专栏
- SIMATIC S7-1500
- 主接线
- 地理接线图
- 电气接线原理及运行
- 四端接线法
- 三分之四断路器接线
- 220-500kV变电站电气接线设计
- 电能计量接线技术手册
- 内接线
- 电工接线与布线快速学
- 新版电动机绕组布线接线彩色图集
- 科斯特整体橱柜
- 电机绕组布线接线彩色图册
- DB6接线模块
- 新编电动机绕组彩色接线图集
- 220~500KV变电所电气接线设计
- 一拖一变频柜电气原理图(三晶VM1000B系列)
- 中高职衔接道路桥梁工程技术专业教学标准探索与实践
- 中博会展中心C1区钢结构屋面大型主桁架的施工技术
- 中国运用现代集成制造技术改造传统产业的经验和前景
- 中国水利水电地下工程数据统计
- 中国恩菲工程技术有限公司中国有色工程设计总院
- 有关CAD技术在水利工程设计中的实际应用方法
- 中国国际太阳能光伏建筑一体化技术发展
- 中国电工技术学会电力系统控制与保护专业委员会成立
- 应用VE进行盐田技术改造
- 中国重汽承担的16个技术创新项目通过省级鉴定验收
- 宜兴抽水蓄能电站地下厂房岩壁梁混凝土温控防裂技术
- 引黄南干二级泵站进水压力钢管内壁防腐施工技术措施
- 云南绿水河二级电站4号水轮机增容技术改造效果分析
- 建筑防水材料及工程技术研讨会
- 云南省建筑专业技术职务任职职称推荐评审表填写范例
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
拆边机
大山槟榔
上海地铁维护保障有限公司通号分公司
甘肃中维国际招标有限公司
舌花雏菊
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司