

小型足球机器人踢球器机电一体化设计
格式:pdf
大小:136KB
页数:3P
人气 :73
 4.7
4.7
装有踢球器的机器人可以出色地完成机器人足球比赛任务。本文对踢球器的概念设计进行了分析,比较详细地说明了RoboCup小型足球机器人的具体设计和工作原理。通过机械部分“智能化”的设计,使得踢球器的控制过程简单而有效,具有很强的鲁棒性,较好地适应了整个机器人的性能要求。



 小型足球机器人踢球器机电一体化设计
小型足球机器人踢球器机电一体化设计 小型足球机器人踢球器机电一体化设计
装有踢球器的机器人可以出色地完成机器人足球比赛任务。对踢球器的概念设计进行了分析,比较详细地说明了robocup小型足球机器人的具体设计和工作原理。通过机械部分"智能化"的设计,使得踢球器的控制过程简单而有效,具有很强的鲁棒性。较好地适应了整个机器人的性能要求。
中型足球机器人电磁铁式踢球机构的建模与控制 中型足球机器人电磁铁式踢球机构的建模与控制
运用机理建模的方法,简化电容和电磁铁的工作模式,建立电磁铁式踢球机构的物理与数学模型。实验表明:该模型能够精准反映机构性能,且控制简单。
编辑推荐下载
足球机器人气动踢球系统建模与射程控制 足球机器人气动踢球系统建模与射程控制
格式:pdf
大小:350KB
页数:4P
4.7
针对robocup中型组足球机器人比赛需求,设计一套可以精确控制踢球距离的气动踢球系统。同时对系统进行建模分析,在大量实验的基础上,采用多元线性回归分析的方法确定影响踢球效果的各因素之间的关系。最后对系统进行了验证,使踢球的第一落点达到"要踢多远就踢多远"的效果,实现精确的射程控制。
一种足球机器人场地白线的提取方法 一种足球机器人场地白线的提取方法
格式:pdf
大小:947KB
页数:5P
4.3
基于折反射原理的全景视觉系统,由于能获得大范围视野的环境信息、因其高实时性和高性价比而被广泛应用在视频监控、视频会议和足球机器人等领域。但是,该系统采用的凸面反射镜,由于存在对场景的压缩而使得实际场景中的一些规则物体(比如直线)的成像存在很大的变形,给提取这些特征带来了困难。而足球机器人比赛场景中的白色标志线是不可多得的参考信息,如果能快速准确地提取出全部或部分白色标志线信息,将给机器人的决策系统提供很大的帮助,从而提高机器人的整体性能。以足球机器人比赛环境为背景,将场地白色标志线的边缘像素点转化到:实际距离和图像像素距离成线性变换关系的图像空间,利用一种结合数字罗盘航向角度信息的hough变换方法提取场地白色标志线信息。试验证明该方法具备很大的可行性。
小型足球机器人踢球器机电一体化设计热门文档

机电一体化设计基础题库答案
格式:pdf
大小:1.8MB
页数:39P
4.7
1 《机电一体化设计基础》试题库答案 一、判断题(正确的打√,错误的打×) 1.机电一体化系统的主要功能就是对输入的物质按照要求进行处理,输出具有所需特 性的物质。(×) 2.系统论、信息论、控制论是机电一体化技术的理论基础,是机电一体化技术的方法 论。(√) 3.信息处理技术是指在机电一体化产品工作过程中,与工作过程各种参数和状态以及 自动控制有关的信息输入、识别、变换、运算、存储、输出和决策分析等技术。(√) 4.自动控制是在人直接参与的情况下,通过控制器使被控对象或过程自动地按照预定 的规律运行。(×) 5.产品的组成零部件和装配精度高,系统的精度一定就高。(×) 6.为减少机械传动部件的扭矩反馈对电机动态性能的影响,机械传动系统的基本固有 频率应低于电气驱动部件的固有频率的2~3倍,同时,传动系统的固有频率应接近控制系统 的工作频率,以免系统产生振荡而失去稳定
软质储液罐体积测量仪机电一体化设计 软质储液罐体积测量仪机电一体化设计
格式:pdf
大小:721KB
页数:5P
4.4
设计了一种用于软体储液罐体积测量的新型体积测量仪,并对可能产生的误差进行了分析和修正。该新型软体储液罐体积测量仪具有装置简单、小巧、实用及测量精度较高的特点。
机电一体化设计在研究公路工程仪器设备上的应用
格式:pdf
大小:336KB
页数:3P
4.7
评述机电化设计在研究我国公路仪器设备中的应用与发展,并结合作者的多年实际研究成果,提出今后公路仪器设备研究方向。
新型浮子式液位计的机电一体化设计 新型浮子式液位计的机电一体化设计
格式:pdf
大小:793KB
页数:4P
4.6
液位测量是自动计量领域的基本内容之一,研制一套实用、较高精度的浮子式液位测量系统有着非常实际的意义。本文介绍了一种新型的浮子式液位计,可用于测量河道、油罐等中的液体液位,并可通过rs485总线构成完整的计算机处理系统。
小型足球机器人踢球器机电一体化设计精华文档
塑料发泡板机头的机电一体化设计与研究 塑料发泡板机头的机电一体化设计与研究
格式:pdf
大小:345KB
页数:4P
4.3
用二次优化的计算方法对线性等锥角岐管和可调间隙衣架式机头流道的几何参数进行了优化计算,在此基础上,通过更换口模、阻尼棒及口模调节装置、温度分区控制等机电一体化设计,成功开发了宽幅发泡挤出板机头。
金属棒切割机的机电一体化设计
格式:pdf
大小:469KB
页数:32P
4.4
摘要 连续铸造是一种先进的铸造方法,其原理是将熔融的金属,不断浇入一种叫做结 晶器的特殊金属型中,凝固(结壳)了的铸件,连续不断地从结晶器的另一端拉出, 它可获得任意长或特定的长度的铸件。 金属棒切割机在连续的铸造中工作,其的工作是由plc控制电磁阀,使电磁阀控 制气缸,并由气缸驱动与其连接的部件,实现对金属棒的准确定长切割,切割后自动 返回初始位置。一个切割机分别切割两条金属棒,其切口深度为35mm,然后由压断机 进行压断。 金属棒切割机是一种既能有效的提高生产率,又在价格和使用方面能被广大用户 所接受的一种新型的自动控制切割机。由plc控制的气动金属棒切割机,其中融合了 气压自动控制、机器人技术和plc控制技术。plc控制各个气动换向阀的电磁铁,由气 缸驱动机械手完成顺序切割过程,实现了机械设计、电器控制和气动控制的有效结合。 这种切割机具有控制方便,性能稳定,结构简单,
立体仓库存取系统机电一体化设计__毕业论文
格式:pdf
大小:978KB
页数:23P
4.6
i 摘要 随着国民经济的飞速发展,自动化立体仓库必然会在各行各业中得到越来越广泛的 应用。自动化立体仓库是现代物流系统的重要组成部分,是一种多层存放货物的高架仓 库系统,集存储、搬运、输送、分发一体,作为工业物流与计算机集成制造系统(cims) 的一部分,代表了当今物流发展的趋势。自动化立体仓库由自动控制与管理系统、高位 货架、巷道堆垛机、自动入库、自动出库、计算机管理控制系统以及其他辅助设备组成。 立体仓库一般是指采用几层、十几层乃至几十层高的货架存储单元货物,用相应的 物料搬运设备进行货物入库和出库作业的仓库。本文构建了了一个实验室规模的的自动 化立体仓库,由控制系统和存取系统组成。控制系统中以三菱fx2n系列plc作为核心控 制元件,专用键盘作为人机接口部件,控制步进电机来驱动一个有三自由度的仓库模型 在高强度导轨上做三维运动,以步进电机每转输出的脉冲数为基础,通过键盘

基于机器人的机电一体化技术专业实训教学模式设计与研究
格式:pdf
大小:104KB
页数:1P
4.5
基于机器人的机电一体化技术专业实训教学模式设计与研究,结合教学实践的开放性、创新性、代表性的特点,针对机电一体化技术专业实训和实训内容进行系统化的设计,打破传统学科的教学模式,引企入校,与企业深度合作,建立以职业能力为导向的教学模式,对提高学生就业竞争能力和对社会需求的适应能力、培育专业特色具有十分重要的意义。
机电一体化论文
格式:pdf
大小:45KB
页数:5P
4.4
机电一体化论文 题目:plc在机电一体化生产系统中的应用 学院: 专业: 班级: 学号: 姓名: 摘要:可编程控制器指建立在计算机的基础之上,以工业现场作业等为主要适用范围的一 类电控控制器,当前我国工业生产自动化水平整体来说较低,plc产品具有着极大发展空间。 plc在生产系统中起着至关重要的作用,自动控制已经成为智能生产系统中必不可少的一部 分。首先对机电一体化技术及plc进行了简要介绍,在此基础上详细阐述了plc在机电一体 化生产系统中的应用。 关键字:plc生产控制智能 一、机电一体化: 1、机电一体化的概念: 机电一体化又称机械电子学,英语称为mechatronics,它是由英文机械学mechanics 的前半部分与电子学electronics的后半部分组合而成。机电一体化最早出现在1971年日 本杂志《机械设计》的副刊上,随着机电一体
小型足球机器人踢球器机电一体化设计最新文档
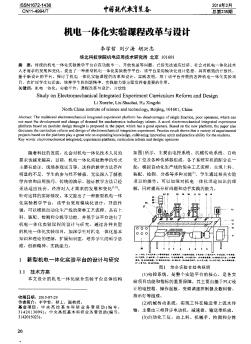
机电一体化实验课程改革与设计
格式:pdf
大小:219KB
页数:3P
4.3
传统的机电一体化实验教学平台存在功能单一、开放性差等问题,已经无法适应经济、社会对机电一体化技术人才需求的发展和变化。提出了一种新型机电一体化实验教学平台,该平台采用模块化设计思想,具有极强的开放性。基于新设计的平台,探讨了机电一体化实验课程的改革和设计。实践表明,基于该平台开展的各种机电一体化实验项目,在扩展学生知识面,培养学生的创新精神、实践能力等方面发挥着重要的作用。
机电一体化毕业设计(论文)轴
格式:pdf
大小:273KB
页数:29P
4.5
国防职业技术学院 毕业设计 题目轴的机械加工 系别机电系 专业机电一体化 班级机电班 姓名雷琛 学号15 指导教师 日期2011年12月 ii 摘要 机械制造工艺学是机械制造专业生的一门专业课程。学习时需要应用加工方法、 机床、工具、测量等方面的知识来研究错综复杂的零件生产工艺的问题。 轴类零件的主要作用是支撑传动零部件、传递扭矩和承受载荷。通常应保证装配 传动件的轴颈对支撑轴颈的同轴度要求,否则会影响传动件的传动精度,并产生噪声。 轴的加工首先应选择适当的毛坯、材料、机床、夹具、道具等,经过粗、精加工等一 系列工序,完成所要求的轴类零件。 本次输出轴的加工将按照理论与实际相结合,加工顺序的安排主要根据基面先行 (先端面后中心孔)、先粗后精、先主后次(次要工序按需插入

86机电一体化毕业论文
格式:pdf
大小:20KB
页数:7P
4.4
机电一体化毕业论文 1,国内外数控技术发展状况 世界制造业在20世纪末的十几年中经历了几次反复,曾一度几乎快成为夕阳工 业,所以美国人首先提出了要振兴现代制造业。90年代的全世界数控机床制造 业都经过重大改组。如美国、德国等几大制造商都经过较大变动,从90年代初 开始已出现明显的回升,在全世界制造业形成新的技术更新浪潮。如德国机床行 业从2000年至今已接受3个月以后的订货合同,生产任务饱满。 20世纪人类社会最伟大的科技成果是计算机的发明与应用,计算机及控制技术 在机械制造设备中的应用是世纪内制造业发展的最重大的技术进步。自从1952 年美国第1台数控铣床问世至今已经历了50个年头。数控设备包括:车、铣、 加工中心、镗、磨、冲压、电加工以及各类专机,形成庞大的数控制造设备家族, 每年全世界的产量有10~20万台,产值上百亿美元。 世界制造业在
机电一体化设计在工作实践中的运用 机电一体化设计在工作实践中的运用
格式:pdf
大小:146KB
页数:未知
4.3
近年来,喷泉景观已经延伸到人们的各个社会活动场所。喷泉需要按照一定的规律改变喷泉式样,以满足人们休闲娱乐的需求,为此,特设计一款新型机电一体化喷泉控制器。文章首先介绍了喷泉控制器工作原理及其plc控制原理,在此基础上分别对硬件设计方案以及相应的软件设计方案进行较为深入的阐述。
小型卫星通信地球站一体化设计 小型卫星通信地球站一体化设计
格式:pdf
大小:277KB
页数:未知
4.3
针对0.3~1.2m五个种类的小型卫星通信地球站所适用的携带、搬移方式进行了分析与归类,对相应站型的天线分解方式及站型一体化设计方案进行了归纳与概述。详细论述了典型站型特别是0.5m单收站型的一体化设计方案和设计结果,并详细介绍了0.5m天线的分解方式及一体化设计的背架,提出了0.5m站型整体携带方案。
基于MSP430的微型足球机器人无线通信子系统的设计 基于MSP430的微型足球机器人无线通信子系统的设计
格式:pdf
大小:514KB
页数:未知
4.7
无线通信子系统是微型足球机器人比赛系统中的至关重要部分,它起到桥梁的作用。论文采用msp430f149单片机作为无线发送和接收控制芯片,首先上位机将控制命令通过计算机串口传输到单片机中,然后单片机控制无线发射装置将指令以广播的方式发送给装有无线接收芯片的足球机器人,最后机器人上的控制芯片按照接收到的指令决定足球机器人左右轮的转速,从而实现对足球机器人的控制。
半自动炮弹喷漆机的机电一体化设计 半自动炮弹喷漆机的机电一体化设计
格式:pdf
大小:404KB
页数:未知
4.7
炮弹外表面涂漆无论在生产还是修理中,都是一道重要工序,我国一直采用手工刷涂工艺,存在诸多问题。本文根据喷漆法新工艺开发了相应的半自动喷漆机。该机采用机电一体化设计,机械传动采用分散动力分别驱动,控制电路以8751单片机为核心,采用霍尔传感器,ssr驱动电路等技术,可完成多种运动程序,并解决了抗干扰及防爆问题,实现了机电一体化。
小型足球机器人踢球器机电一体化设计相关
文辑推荐
知识推荐
百科推荐


职位:村庄规划设计师
擅长专业:土建 安装 装饰 市政 园林


