

塔式起重机转台的弧焊机器人焊接技术
格式:pdf
大小:4.0MB
页数:5P
人气 :67
 4.8
4.8
针对国内塔机行业大多还在延续手工焊接的生产方式,工人劳动强度大、作业条件差、生产效率低、产品质量不易控制等问题而严重制约企业发展的现象,对弧焊机器人应用于塔机转台的焊接技术进行了初步探讨.搭建了转台机器人焊接工作站,制定了工艺试验方案,并选定了最佳的焊接工艺参数.试验结果表明:采用弧焊机器人焊接塔机转台是行之有效的方法,确保了产品质量和生产效率,使其在实际作业中更安全、更有效、更平稳.



 弧焊机器人焊接双压智能环网柜气箱的技术
弧焊机器人焊接双压智能环网柜气箱的技术 弧焊机器人焊接双压智能环网柜气箱的技术
随着先进制造技术的发展,采用机器人实现焊接过程自动化、柔性化与智能化已成为必然趋势。近年来,我国焊接机器人的应用主要集中在汽车和摩托车等行业。在电力开关装备行业中,为了保证柜体或箱体的焊接强度、精度及焊缝致密性达到国家gis开关柜的标准要求,国内先进企业采用了弧焊机器人与cmt焊接技术代替传统的mig/mag焊接技术,从而提高了产品质量和生产效率。本文采用机器人焊接的工艺与结构等对柜式气体绝缘设备(c-gis)进行设计和分析,在试验的基础上确定了工艺参数,并组织实施。

焊接机器人在随车起重机转台制造中的应用
介绍了焊接机器人在随车起重机转台制造中的应用,分析了机器人焊接转台的焊接工艺流程及焊接工位的优化布置两个方面,并在此基础上阐述了机器人焊接在提高转台焊接生产效率、保证焊接质量、优化生产工艺流程等方面存在的优势。
编辑推荐下载
弧焊机器人工作房气动卷帘门 弧焊机器人工作房气动卷帘门
格式:pdf
大小:150KB
页数:1P
4.7
为了保护操作人员的身体健康,本文在弧焊机器人工作房的基础上,提出了一种与机器人焊接自动控制过程相适应的气动卷帘门。

CPV350电焊机与弧焊机器人系统的接口设计
格式:pdf
大小:692KB
页数:3P
3
cpv350电焊机与弧焊机器人系统的接口设计——介绍了cpv350型逆变电焊机与孤焊机器人控制系统的连接方法。通过分析cpv350电甥l机的接口特点.设计了系统连接的硬件方案;并开发了相应的软件模块,成功的实现了该电焊机与孤烨机器人系统的集成。
塔式起重机转台的弧焊机器人焊接技术热门文档
汽车半壳封装式后消声器压合弧焊机器人柔性焊接系统 汽车半壳封装式后消声器压合弧焊机器人柔性焊接系统
格式:pdf
大小:864KB
页数:4P
4.5
从系统布置形式、变位机结构特性、气液增压系统特性、模具结构设计特点、模具快换结构设计几方面介绍了整套焊接系统的优点。与传统焊接方式相比,其突出特点是维护简单、通用性强、可实现多种半壳式后消声器互换生产,使工装系统的使用寿命延长,经济性提高。
双丝机器人焊接在塔式起重机标准节拼方中应用
格式:pdf
大小:995KB
页数:2P
4.6
在大型塔式起重机重要部件标准节焊接拼方存在生产难点,本文通过加工工艺改进,将传统焊接拼方改为双丝机器人焊接,从而提高了标准节的焊接质量,提升了标准节产能。
铂合金拉丝漏板板嘴弧焊机器人设计 铂合金拉丝漏板板嘴弧焊机器人设计
格式:pdf
大小:1.8MB
页数:6P
4.7
针对玻璃纤维铂合金拉丝漏板加工制作中长期依赖手工操作来实现板嘴焊接的现状,提出了采用弧焊机器人来实现铂合金拉丝漏板板嘴连接自动化的解决方案。在探讨铂合金拉丝漏板加工制作对板嘴连接的工艺要求以及现行手工弧焊工艺的基础上,分析了实现拉丝漏板板嘴弧焊连接自动化的主要技术障碍,提出了拉丝漏板板嘴弧焊机器人实施方案,最后给出了该机器人的总体设计。
塔式起重机转台的弧焊机器人焊接技术精华文档
上旋转塔式起重机与下旋转塔式起重机的区别
格式:pdf
大小:34KB
页数:3P
4.6
1 上旋转塔式起重机与下旋转塔式起重机的区别 塔式起重机(towercrane)是指动臂装在高耸塔身上 部的旋转起重机。作业空间大,主要用于房屋建筑施工中 物料的垂直和水平输送及建筑构件的安装。由金属结构、 工作机构和电气系统三部分组成。金属结构包括塔身、动 臂和底座等。工作机构有起升、变幅、回转和行走四部分。 电气系统包括电动机、控制器、配电柜、连接线路、信号 及照明装置等。 上旋转塔式起重机 塔式起重机之一,其基本特点是塔身不转动。回 转支承以上的动臂、平衡臂部分,通过回转机构和回转支 承,能绕塔身中心线作全回转。 根据使用要求,又分运行式、固定式、附着式和 内爬式四种型式。 运行式塔式起重机,整个起重机可沿轨道运行, 作业空间大。如将底座固定在轨道上,或不用底座而将塔 身直接固定在特制的基础上,就成为固定式塔式起重机, 其动臂较长,可以扩大施工作业面积。固定式塔式起重机 2
塔式起重机结构焊接、装配工艺探讨 塔式起重机结构焊接、装配工艺探讨
格式:pdf
大小:90KB
页数:2P
4.8
在塔式起重机制造过程中,焊接工艺、装配工艺是指导塔机生产的重要技术依据。针对塔机焊接工艺中存在的问题,根据实践经验,对塔式起重机结构焊接工艺规范的确定,长细杆的焊接,塔机装配工艺,装配中回转机构配装法、正常装配法及比较方面进行了探讨,对确保塔机产品质量和保障塔机的使用安全提供参考。
台帐十七(塔式起重机)
格式:pdf
大小:162KB
页数:11P
4.5
台帐十七安2 塔式起重机 目录 一、塔式起重机安装(拆除)施工方案 二、施工方案审批 三、塔式起重机安装(拆除)安全技术交底 四、塔式起重机出租前检查表 五、塔式起重机安装后自检表 六、塔式起重机联合验收表 七、塔式起重机升节验收表 八、塔式起重机月度巡检表 九、塔式起重机交接班记录 十、机械设备维修保养记录 十一、施工现场设备一览表 塔式起重机安装前检查表 表17.1 制造单位型号检查日期 出厂编号出厂日期备案编号 检查项目检查内容检查结果 金属结构 及配件 部件、附件是否齐全无缺损,各联接螺栓联结是否牢固 螺栓、销轴等联结件是否有裂纹、变形、锈蚀严重等现象 主要受力构件是否有塑性变形和裂纹 金属结构的连接焊缝是否有明显可见的焊接缺陷,结构是 否有变形、疲劳裂纹 爬梯、平台、走道是否无变形、脱焊、锈蚀严重等现象且 符合规范要求 配
机器人技术及焊接自动化
格式:pdf
大小:952KB
页数:3P
4.8
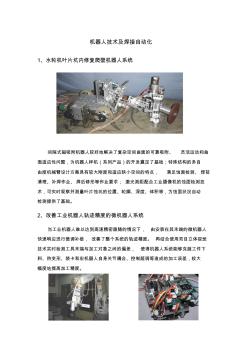
机器人技术及焊接自动化 1、水轮机叶片坑内修复爬壁机器人系统 间隙式磁吸附机器人较好地解决了复杂空间曲面的可靠吸附、灵活运动和曲 面适应性问题,为机器人样机(系列产品)的开发奠定了基础;特殊结构的多自 由度机械臂设计方案具有较大刚度和适应狭小空间的特点,满足蚀面检测、焊前 清理、补焊作业、焊后修形等作业要求;激光测距配合工业摄像机的蚀面检测技 术,可实时观察并测量叶片蚀坑的位置、轮廓、深度、体积等,为蚀面状况自动 检测提供了基础。 2、改善工业机器人轨迹精度的微机器人系统 当工业机器人难以达到高速精密跟随的情况下,由安装在其末端的微机器人 快速响应进行微调补偿,改善了整个系统的轨迹精度。再结合使用双目立体视觉 技术实时检测工具末端与加工对象之间的偏差,使得机器人系统能够克服工件下 料、热变形、装卡和宏机器人自身关节耦合、控制超调等造成的加工误差,较大 幅度地提高加工精度。 3
塔式起重机转台的弧焊机器人焊接技术最新文档
动臂塔式起重机与平头塔式起重机
格式:pdf
大小:35KB
页数:6P
4.6
动臂塔式起重机与平头塔式起重机 1塔机的发展概况.........................................1 2动臂塔机...............................................2 2.1上回转动臂塔机的产生...............................2 2.2上回转动臂塔机的优点...............................2 2.3动臂塔机市场分析...................................2 3平头塔式起重机.........................................3 3.1平头塔式起重机的产生及发展.........................3 3.2平头塔机的应用.
塔式起重机
格式:pdf
大小:3.2MB
页数:35P
4.8
xxxxxxxxxxxxx xxxxxxxxxxx 14-2-4塔式起重机 14-2-4-1塔式起重机的类型 塔式起重机按有无行走机构可分为固定式和移动式两种。前者固定在地面上 或建筑物上,后者按其行走装置又可分为履带式、汽车式、轮胎式和轨道式四种; 按其回转形式可分为上回转和下回转两种;按其变幅方式可分为水平臂架小车变 幅和动臂变幅两种;按其安装形式可分为自升式、整体快速拆装和拼装式三种。 目前,应用最广的是下回转、快速拆装、轨道式塔式起重机和能够一机四用(轨 道式、固定式、附着式和内爬式)的自升塔式起重机。拼装式塔式起重机因拆装 工作量大将逐渐淘汰。 塔式起重机型号分类及表示方法见表14-63。 塔式起重机型号分类及表示方法(zbj04008-88)表14-63 14-2-4-2下回转快速拆装塔式起重机 下回转快速拆装塔式起重机都是600kn·m以下的中
通用变位机与机器人圆弧焊接的协调控制 通用变位机与机器人圆弧焊接的协调控制
格式:pdf
大小:325KB
页数:未知
4.6
以焊接机器人和独立变位机的协调作业为研究对象,提出了空间圆弧焊接的一种协调方法.该方法利用改进的三次埃尔米特插值给出了单旋转自由度变位机的运动表达式,并以此为依据,结合机器人和工控机控制的变位机之间的协调运动关系,采用分段直线拟合出了机器人的空间运动轨迹,从而为机器人和变位机采用各自独立控制器的运动控制提供了一种可行的方法.经matlab仿真和实践验证,该方法是切实可行的.

塔式起重机
格式:pdf
大小:1.2MB
页数:12P
4.6
塔式起重机 --1-- 《建筑施工机械》结课作业 塔式起重机 塔式起重机是一种具有竖立塔身、吊臂装在塔身顶部的转臂起重机,广泛应用于高层建 筑中,用于物料的垂直和水平运输以及建筑构件的安装。 一、发展简介 塔式起重机简称塔机,亦称塔吊,最早有关建筑用塔机专利颁发于1900年。1905年出 现了塔身固定的装有臂架的起重机,1923年制成了近代 塔机的原型样机,同年出现第一台比较完整的近代塔机。 1930年当时德国已开始批量生产塔机,并用于建筑施工。 1941年,有关塔机的德国工业标准din8770公布。该标 准规定以吊载(t)和幅度(m)的乘积(tm)一起以重力矩表 示塔机的起重能力。 塔式起重机是在第二次世界大战后才真正获得发展的。战后各国面临着重建家 园的艰巨任务,浩大的建筑工程量迫切需要大量性能良好的塔式起重机。自塔式起重 机
塔式起重机转台的弧焊机器人焊接技术相关
文辑推荐
知识推荐
百科推荐


职位:暖通设计工程师
擅长专业:土建 安装 装饰 市政 园林


