

一种新的室内机器人手势指令识别系统
格式:pdf
大小:505KB
页数:5P
人气 :72
 4.6
4.6
针对室内机器人手势指令识别系统识别率低、算法复杂等问题,提出一种新的设计方案.利用固定在室内某一位置的图像采集设备获取手势图像,采用YCbCr皮肤颜色模型进行手势分割,再通过八邻域边界追踪及傅里叶变换得到特征向量,最后通过最小距离法进行识别,并以此为基础,给出了手势指令识别的基本框架.实验表明,该系统的识别率较高,在90%以上,是一种简单合理的识别系统.



 一种简化的室内机器人电磁定位算法与系统
一种简化的室内机器人电磁定位算法与系统 一种简化的室内机器人电磁定位算法与系统
文章提出了一种简化的室内机器人的电磁定位算法。在定位空间内布置一个发射线圈和一个三轴接收线圈,形成电磁耦合系统。以接收线圈三轴为参考建立空间直角坐标系,并对发射线圈加载正弦电信号作为激励信号,产生交变电磁场。接收线圈感应到磁场的变化,通过测量计算感应耦合的强度特征值,确定移动目标的位置参数。本系统将三轴接收线圈固定,而将水平发射线圈置于平面移动机器人目标之上,这样可将定位算法简化。根据磁偶极子模型,提出了解析计算方法。通过仿真和实验,证明该方法能够满足室内机器人的定位要求,是可行且有效的。

编辑推荐下载
 履带式挖掘机器人CCD道路识别
履带式挖掘机器人CCD道路识别 履带式挖掘机器人CCD道路识别
格式:pdf
大小:555KB
页数:4P
4.6
为实现液压挖掘机器人的无人操纵、自主作业,对小松液压挖掘机进行机器人化改造,在对挖掘机行走机构、回转机构、工作装置实现全液压电液比例控制技术的基础上,通过电荷耦合器件(chargecoupleddevices,ccd)摄像头采集室外规定路径图像,图像经平滑、去噪、二值化、边缘提取等处理后,对路径进行识别,将路径识别特征量作为履带式液压挖掘机左右行走液压马达的驱动控制信号,实现挖掘机对路径轨迹的自主跟踪.在二值图像基础上,采用直接边缘检测和跟踪边缘检测相结合的识别方法,保证路径识别可靠性.改造后的挖掘机器人集机械、液压、自动控制、机器视觉等技术于一体,采用摄像头获取路径图像,构成视觉伺服控制系统,控制挖掘机的行走机构,经实验验证是可行的.
室内机器人手势指令识别系统热门文档

室内机产品手册
格式:pdf
大小:6.4MB
页数:11P
4.3
设计与规格如有更改,恕不另行通知。 本手册的解释权与所有版权全部保留。 -------semtectechnologycompanyltd. 10.1'indoorunit usermanualver:1.0 10.1寸室内机 用户手册 前言 首先感谢贵公司对我们的信任,选用我们的音/视频数字信号传输方案和产品、同时,也感谢 贵公司对我们系统提出的任何要求和建议、使得我们能够顺利的完成各种解决方案并及时制订出为 贵公司服务的方案。 我们是一个专业开发全数字音/视频解决方案的技术团队、已成功的为几十家业内公司提供数 字音/视频信号传输方案和产品、 我们团队愿与贵公司建立长期合作伙伴关系,我们将凭借着与众多行业用户的成功合作经验 和优质的服务为贵公司提供全面的解决方案,以使贵公司能够更加专注于自己的核心业务。 伟创达电子科技(深圳)有限公司 2013年5月

车辆识别系统工程
格式:pdf
大小:8KB
页数:4P
4.7
车辆识别系统工程 服 务 合 同 甲方(建设方): 乙方(施工方): 甲方委托宁夏众源安泰保安押运服务有限公司以下简称乙方承担安防监控系统工程。为明确 甲、乙双方的权利、义务和经济责任,本着平等互利、等价有偿的原则,经过认真协商达成 本协议。 一、工程概及设备清单 1、工程名称: 2、工程地点: 3、工程内容: 4、设备清单(详见附件)。 二、双方的责任和义务 1、甲方负责提供施工用电以保证乙方能如期完成工程工期。并承担以下义务: 2、按时对工程、施工及工程进度实施监督和验收。 3、按时支付工程款。 4、乙方应按合同规定的时间及时提供工程所需的设备材料,在保证工程质量和工程进度的 前提下,完成设备的集成和安装调试工作。 三、工程时间和进度 1、工期为自开工之日起至验收完毕共日。 2、如遇下列情况,乙方可顺延工期: 1)、施工现场电源未接通,或障碍物未清
空调器室内机噪声的控制与优化
格式:pdf
大小:1.1MB
页数:14P
4.4
室内机空调器噪声的控制与优化 吴彦东,莫平辉,程卓明,李苏洋 (广东美的商用空调设备有限公司) 摘要:本文以某款室内机噪声及异音的整改为例,理论结合实际分析 了室内机空调器常见噪声的类型及根源,并提出了具体的整改措施及 结构优化,为噪声的控制与优化奠定了基础。 关键词:噪声,异音,风机风道,结构优化,频谱分析 前言 空调器,尤其是室内机空调器的噪声是影响其舒适性指标的重要因素,也是评 价空调器质量品质的重要指标之一。随着经济的发展和生活水平的不断提高,人们 对空调器噪声指标要求越来越高,空调行业的竞争更加激烈,空调产品除了必须有 好的性能和安全指标之外,低噪声、高音质则是提高产品市场竞争力的重要指标之 一。近些年来,空调器的噪声问题已经受到空调界的广泛关注,并进行了比较系统 的研究,一些研究成果应用于生产实际取得了一定的效果[1,2]。本文以某款室内 机空调的噪声整改为例,结合

室内机器人手势指令识别系统精华文档
空调器室内机气动噪声模拟
格式:pdf
大小:744KB
页数:5P
4.4
采用数值模拟的方法对空调器室内机气动噪声进行了计算,分析了室内贯流风机蜗舌处的压力脉动,并通过curle方程和快速傅里叶变换得到了蜗舌处旋转噪声频谱。通过对旋转噪声频谱的分析,证明了采用不等距叶轮可大大降低贯流风机基频处噪声,使基频的声能分布到较宽的频带范围内,并且可以使基频的峰值移到低频部分,从而使风机的噪声干扰能力大大降低。同时通过对各种不等距叶轮的旋转噪声频谱进行分析,提出了一种能够有效降低贯流风机旋转噪声的不等距叶轮结构。
空调器室内机漏水问题
格式:pdf
大小:68KB
页数:1P
4.6
分体式房间空调器以它的室内机运动宁静,外观秀丽等优点,受到用户的欢迎。但分体式空调器也有它的不足之处,例如制冷剂容易泄漏,室内机有漏水现象等。分体壁挂式空调器室内机漏水现象,国产、进口空调器都存在。室内机漏水会弄脏墙壁、地毯等物,破坏了舒适的室内环境。我认为,漏水现象有正常与不正常两种情

室内机器人手势指令识别系统最新文档
地震检波器弹簧片视觉识别系统设计 地震检波器弹簧片视觉识别系统设计
格式:pdf
大小:400KB
页数:4P
4.3
视觉识别技术是生产线自动化过程中重要的前沿技术之一,在石油地震检波器生产过程中,检波器弹簧片的自动定向及版型识别又是生产线自动化的一个关键环节。介绍了一种检波器弹簧片视觉识别系统设计方案,并主要对视觉识别应用于弹簧片的设计原理进行了分析。
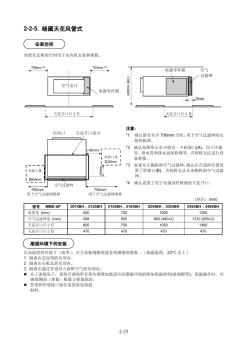
![2、室内机应用[兼容模式]](https://files.zjtcn.com/group1/M00/2A/2B/CgoBZ2AcIFGAYqQnAAANKj5HYaA856.jpg)

空调室内机
格式:pdf
大小:8.5MB
页数:13P
4.4
前言: 俗话说“麻雀虽小,但五脏俱全”,虽空调的室外机被人们称之为其“心脏”,但对于空调本 身来说,室内机起到的作用同样至关重要,不容忽视。 室内机看似小巧、简单,可其内部构造一样不亚于室外机,而由于室内机的做工也千差 万别,包括面板材质、冷凝器、电机以及辅助电加热管等等组成原件的运用,都直接的影响 这一款空调的性能与工作情况。 今天,万维家电网为您带来“暴力男实拆海信空调室内机”,为大家逐一探秘,究竟空调 室内机由哪些重要部件组成,它们又有着怎样的品质特性与差异。 今天,我们来拆解这款海信kfr-35gw/08fzbpc空调的室内机。 首先,我们需要打开空调室内机的面板,找出影藏在室内机上的螺丝口,按照顺序,我 们取出固定在室内机上的螺丝,进行逐步拆解。 其实,室内机虽看似简单,但其就像是空调室外机的一个缩小版,除了一个最主要的室 内电机,空调室内机还包
8防区室内机功能介绍
格式:pdf
大小:64KB
页数:4P
4.3
珠海睿安科技有限公司产品功能说明 版本号/修改号 a/0 文件 编号 bg-yf-10004a 发布日期总页数4 标题12款8防区室内机功能介绍页次1 项目签名日期 下 发 记 录 部门签名部门签名备注 拟制写入研发 技术评审工程 审核生产 批准品管 12款8防区室内机功能介绍 一、基本功能: 1.触摸按键,7”tft屏 2.呼叫、对讲、开锁、监视,可监视多通道影像1--5 3.2分钟待机自动断线功能 4.外置tft亮度、色度调节、通话音量调节、振铃音量调节 5.呼梯按钮:为来客按所需楼层,呼叫电梯至所需楼层 7.八个防区 二、技术参数: a)工作电流:电流消耗(含tft):小于350ma b)通话方式:免提双向通话(半双工) c)工作温度:-10—6

室内机安装施工
格式:pdf
大小:9KB
页数:6P
4.6
一.室内机安装施工 1.工艺流程 设备基础(支架)验收→开箱检查→设备运输→安装调平→试 运转 2.设备基础(支架)安装及验收 2.1基础:机组在安装前应由专业人员核对屋面(结构)的承 重能力。机座工字钢或槽钢制作;机座可用角钢制作托架、加防震 耐磨环氧地胶垫置于地面。机座表面应水平。主机可直接用螺栓固 定在机座上。 2.2吊装点应紧固且需要足够强度以承受机组重量及运行振 动,并且不影响结构的安全,必要时须进行承重核算。 3.开箱检查 3.1设备在就位安装前必须进行开箱验收,协同招标人代表检 查外观有无一次搬运造成的损伤,有无保管不完善造成的锈蚀进水 问题,检查设备零件是否符合装箱单,并做好三方签认记录,主要 检查项目有: ①箱号、箱数以及包装情况,表面有无损坏和锈蚀; ②设备的名称、型号和规格; ③装箱清单、随机设备技术文件、资料; ④随机专用工具及零部件的数量。 3.2
基于超声波传感器的室内机器人定位研究 基于超声波传感器的室内机器人定位研究
格式:pdf
大小:120KB
页数:3P
4.4
为提高三边测量法定位精度,将三边测量法和最小二乘法结合起来进行机器人定位坐标计算,减小定位误差。同时,考虑到温度对超声波测量的影响,提出一种温度补偿方法对超声波声速进行修正。实验结果表明,采用上述方法能使机器人的定位误差控制在厘米级别,基本满足室内机器人的定位要求。
基于射频识别的室内导游机器人设计 基于射频识别的室内导游机器人设计
格式:pdf
大小:96KB
页数:未知
4.3
本文设计并实现了一个基于射频识别技术的室内导游机器人系统。系统选择at89c52型单片机作为机器人的控制核心,在上位pc机协助下,利用射频识别技术实现自主定位与路径规划,通过对机器人的实时运动控制,配合语音播放功能,较好的实现了室内导游服务功能。
卫生洁具施釉机器人手臂控制系统设计 卫生洁具施釉机器人手臂控制系统设计
格式:pdf
大小:360KB
页数:未知
4.5
生产应用中,卫生洁具施釉机器人手臂有效提高了卫生洁具陶瓷生产的效率和产品质量,机器人手臂利用压缩空气将釉浆雾化后喷涂在卫生洁具坏体表面,节省了原材料,将代替卫生洁具陶瓷生产过程中以手工施釉为主的操作。卫生洁具生产中施釉工段的工作环境比较恶劣,粉尘和噪声对人体的危害很大,这就客观的要求施釉作业由原来的手工操作转变为机器人手臂操作。
基于TDOA算法与FPGA平台的室内机器人定位导航系统 基于TDOA算法与FPGA平台的室内机器人定位导航系统
格式:pdf
大小:187KB
页数:未知
4.8
机器人自主定位导航系统已成为机器人研发的一个重要课题。依据tdoa定位算法,利用fpga/mcu/pc多平台开发了一套移动机器人的超声波室内定位导航系统,系统由定位控制系统和机器人控制系统两大部分组成。机器人发射超声波信号与活动区域内的信标进行通信,定位控制系统通过计算获取机器人位置信息,并进行路径规划,把控制指令传给机器人令机器人做出应答。实验测试表明该系统达到较高的定位精度,具有操作简单、成本较低和应用范围广等优点。
基于TDOA算法与FPGA平台的室内机器人定位导航系统 基于TDOA算法与FPGA平台的室内机器人定位导航系统
格式:pdf
大小:187KB
页数:未知
4.8
机器人自主定位导航系统已成为机器人研发的一个重要课题。依据tdoa定位算法,利用fpga/mcu/pc多平台开发了一套移动机器人的超声波室内定位导航系统,系统由定位控制系统和机器人控制系统两大部分组成。机器人发射超声波信号与活动区域内的信标进行通信,定位控制系统通过计算获取机器人位置信息,并进行路径规划,把控制指令传给机器人令机器人做出应答。实验测试表明该系统达到较高的定位精度,具有操作简单、成本较低和应用范围广等优点。
室内机器人手势指令识别系统相关
文辑推荐
知识推荐
百科推荐


职位:环保销售工程师
擅长专业:土建 安装 装饰 市政 园林


