

日照港矿石机械化采制样系统中机器人的应用
格式:pdf
大小:857KB
页数:6P
人气 :91
 4.8
4.8
日照港矿石机械化采制样系统中应用机器人进行水分在线测试及制样,使进口铁矿石在卸货过程中实现水分检测与卸货过程同步进行,并且在卸完船后可以直接得到0.210 mm以下的试样,实现了机械化采制样系统中水分在线检测和在线同步制样。通过优化设计在2套铁矿石机械化采样系统中用1台机器人进行在线水分测定及样品制备,使得系统流程更合理、先进。




日照港矿石码头机械取制样设施工艺设计
本文以日照港矿石码头机械取制样设施为例,阐述了铁矿石机械取制样的主要流程和设备配置,该工艺经反复优化,具有集成度高、技术先进、适用性强的特点,可供其它同类工程的设计参考借鉴。
 日照港散装粮谷机械化采样系统设计和性能试验方案
日照港散装粮谷机械化采样系统设计和性能试验方案 日照港散装粮谷机械化采样系统设计和性能试验方案
随着我国散装粮谷机械化采样系统的应用逐渐增加,如何对散装粮谷机械化采样系统的性能、工艺、要求进行设计显得尤为重要。本文主要介绍了在日照港应用的两套散装粮谷采样系统设计和性能试验方案,并提出了工艺流程的修改建议,供今后生产、使用类似机械化采样系统的部门参考。
编辑推荐下载
浅谈铁矿石机械取制样系统工艺设计 浅谈铁矿石机械取制样系统工艺设计
格式:pdf
大小:168KB
页数:未知
4.8
由于我国国民经济的发展,钢铁工业也随之迅速发展,为此考虑到钢铁产品的质量、成本等诸多因素,目前已越来越多地采用机械取制样方法来取代手工取制样。当前国内的机械取制样系统主要使用在钢厂和矿石进口港,本文就港口卸船系统的机械取样方式和制样工艺系统作探讨性介绍。
关于机器人技术在机械加工中的应用 关于机器人技术在机械加工中的应用
格式:pdf
大小:187KB
页数:2P
4.5
现如今,高速发展的工业机器人已经广泛应用在机械加工方面。本文首先简要分析了工业机器人产业的应用现状,并据此探讨总结了机器人技术加工体系存在的缺点,最后对其未来的发展趋势进行了展望。
日照港矿石机械化采制样系统中机器人应用热门文档
机器人技术之机械臂的制作
格式:pdf
大小:405KB
页数:13P
4.4
课程设计说明书 题目:智能车及装配机器人系统的设计与制作 2011年10月 1 目录 1.摘要···························································1 2.前言···························································1 3.方案论证·······················································1 4.硬件设计·······················································4 5.软件设计·······················································5 6.修改建议··················
基于机械自动化的工业机器人技术专业研究
格式:pdf
大小:147KB
页数:2P
4.7
在中国制造2025的社会大潮中,面向智能化发展成为重中之重,这为发展工业机器人技术专业人才培养带来新的机遇和挑战。本文从专业发展的必要性和可行性出发,阐述了对工业机器人技术专业的研究。
工业机器人在机械加工中的应用
格式:pdf
大小:125KB
页数:4P
4.6
随着工业机器人技术的快速发展,其在机械加工领域得到了广泛的应用。结合目前工业机器人产业的发展,在分析国内外其发展现状的基础上,就工业机器人在轨迹规划、离线编程、加工精度和误差补偿、刚度等相关方面技术的研究,综合其在机械加工中的应用作简要的综述。总结了工业机器人在机械加工领域应用的优缺点,以及未来发展的趋势。
工业机器人在机械加工中的应用 工业机器人在机械加工中的应用
格式:pdf
大小:1.1MB
页数:1P
4.4
科技快速发展,工业机器人也在不断进步,不断改进,工业机器人使得工业生产效率更高并且节省了大量人力。如今,机器人取代机床进行加工生产已经成为未来机械加工业的必然趋势,机器人的应用也必将广泛。文章介绍了我国工业机器人应用的现状,重要的用途以及未来的发展趋势。
解析履带式移动机器人底盘机械缮构设计 解析履带式移动机器人底盘机械缮构设计
格式:pdf
大小:82KB
页数:未知
4.8
机器人是一种能够按照设定好的程序,或者接受远程指挥而自动执行工作的机器装置,能够协助或者取代人类工作,因此在许多领域中都有着非常广泛的应用。机器人的移动方式包括了轮式、腿式及履带式等,其中履带式能够适应复杂的地理环境,具备良好的承载能力,受到了技术人员的关注。本文主要对履带式移动机器人底盘机械结构的设计进行了分析。
日照港矿石机械化采制样系统中机器人应用精华文档
软脊柱型四足机器人的机械结构 软脊柱型四足机器人的机械结构
格式:pdf
大小:89KB
页数:未知
4.6
随着现代科技的崛起,机器人的运用也越来越广泛,其中四足机器人相比双足机器人具有更高稳定性,高实用性的优点,相比六足和八足机器人更简单。本文是在前人研究的基础上,设计了起跳型四足机器人,建立机械结构,并进行运动学分析。这种机器人主要是对兔子跳跃的运动过程的仿生,相比其他仿生机器人有结构简单,运动速度快起跳能力强的特点。首先进行对前人四足机器人机械结构的分析,然后运用仿生学原理设计本文的起跳型四足机器人,最后就本文的机械结构进行运动学分析。
光纤激光毛化机器人系统 光纤激光毛化机器人系统
格式:pdf
大小:563KB
页数:6P
4.4
光纤激光作为第三代激光技术的代表,具有其他激光器无可比拟的技术优越性和广阔的应用发展空间,将会逐步取代全球大部分高功率co2激光器和绝大部分yag激光器。利用光纤激光器的优点,集成开发了第五代全新的光纤激光机器人毛化系统,系统以光纤激光器为载体,协同机器人及其他设备来完成轧辊毛化作业。光纤激光毛化柔性工作站与传统的co2激光毛化设备相比取得了多项重大突破,如系统采用普通机床代替昂贵的磨床实现毛化功能,不仅节约大量的设备投资费用,并大幅度提高生产效率;系统对轧辊旋转时的轴向跳动容忍度大,毛化速度大幅度提高;光纤激光毛化技术可实现毛化点形貌的任意设计以及毛化点的有序、无序排列;毛化成本大幅度降低,没有三废,是一种绿色制造技术。
视觉系统在机器人焊接中的应用与展望
格式:pdf
大小:396KB
页数:5P
4.8
第24卷 2005年 第11期 11月 机械科学与技术 mechanicalscienceandtechnology vol.24 november no.11 2005 收稿日期:20041026 基金项目:国家自然科学基金项目(50175027)资助 作者简介:刘苏宜(1974-),女(汉),江西,博士研究生 e2mail:irishlsy@163.com 刘苏宜 文章编号:100328728(2005)1121296205 视觉系统在机器人焊接中的应用与展望 刘苏宜,王国荣,钟继光 (华南理工大学,广州 510640) 摘 要:随着焊接生产自动化和智能化程度的提高,视觉系统在机器人焊接中的重要性日益凸显。本文简述了机器 人焊接中视觉系统的分类、原理、特点及适用性,综述了视觉系统在机
l六足昆虫机器人机械原理
格式:pdf
大小:539KB
页数:5P
4.4
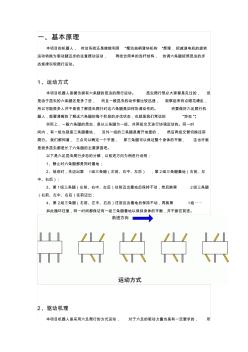
一、基本原理 本项目的机器人,传动系统还是继续利用“摆动曲柄滑块机构”原理,把减速电机的旋转 运动转换为驱动腿迈步的往复摆动运动,再结合简单的连杆结构,协调六条腿按照昆虫的步 态规律实现爬行运动。 1、运动方式 本项目机器人是模仿拥有六条腿的昆虫的爬行运动。昆虫爬行想必大家都是见过的,但 是由于昆虫的六条腿还是多了些,而且一般昆虫的动作都比较迅速,观察起来有点眼花缭乱, 所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。而要做好六足爬行机 器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的“步态”。 实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。同一时 间内,有一组也就是三条腿着地,另外一组的三条腿是离开地面的,然后两组交替切换往前 爬行。我们都知道,三点可以确定一个平面,即三条腿可以保证整个身体的平衡,这
采用涂装机器人测量漆层厚度 采用涂装机器人测量漆层厚度
格式:pdf
大小:353KB
页数:2P
4.4
介绍了将标准的手持式测厚仪改造成由三维成像系统引导的除漆和涂装的机器人。三维成像系统追踪和控制机器人的动作,以进行除漆、涂装和测量漆层的厚度的作业
日照港矿石机械化采制样系统中机器人应用最新文档

机器人实验报告
格式:pdf
大小:457KB
页数:6P
4.5
1 机 器 人 实 验 报 告 册 制作人:叶翔徐培嘉陈琳 制作日期:2012年12月 2 目录 1、中国机器人大赛双足竞步机器人比赛规则简述............3 2、双足竞步机器人构成简介.......................3 3、功能及其改进方案简介.........................4 4、设计与制作软件简介...........................4 5、比赛功能简介.................................5 6、制作心得体会.................................6 3 一、中国机器人大赛双足竞步机器人比赛规则简述 1、交叉足印竞步机器人: 结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面, 以箭头方向作为正面,是自主式脱线控制,用
iPad专用机器人支架诞生 iPad专用机器人支架诞生
格式:pdf
大小:289KB
页数:1P
4.6
美国创业公司doublerobotics开发了一款名为double的机器人。它由一部ipad、一个支架和电动两轮底座组成,支持远程操纵,能实现前进、转弯等动作,可以在公司或家里使用。它能伸展至5英尺高,或折叠至5.6英尺,从而模拟操纵者的站姿或坐姿。doubletelepresencerobot目前售价1999美元,折合人民币约12477元,对于那种公事繁忙,又抽不出身去参加各种会议的大佬们来说,这个东西真的是个不错的贴心宝贝。
工业机器人机械结构模块化设计 工业机器人机械结构模块化设计
格式:pdf
大小:173KB
页数:3P
4.5
在对工业机器人进行市场调查、功能分析的基础上,对机器人进行模块划分,将工业机器人分为4种通用模块,分别是执行器模块、绕z轴旋转臂模块、绕x(y)轴俯摆臂模块及底座平台模块,这4种模块间共有3种通用的标准接口。用户设计机器人产品时,只需要根据实际工况选择合适的模块种类,按照标准的方式进行模块装配,即可完成机器人设计,极大地提高了工业机器人的设计效率。

6关节机器人技术论文
格式:pdf
大小:33KB
页数:3P
4.7
1 1、工业领域中一般多用6关节型机器人,根据所学内容谈谈 该种机器人都有哪些部件组成,每个部件的工作原理及选择 该部件的依据(800字以上) 目前各大工业机器人厂商提供的六轴关节机器人结构从外观上看大同小异,相差不大,从本 质上来说,其结构应该都是一致的,即其第一关节旋转轴(基座旋转轴)、第四关节旋转轴、 第六关节旋转轴(手腕端部法兰安装盘的旋转中心)在同一个平面内;第二关节旋转轴、第 三关节旋转轴以及第五关节旋转轴互相平行,而且与前面提到到平面垂直;另外,还需要保 证第四关节旋转轴线、第五关节旋转轴线以及第六关节旋转轴线相交于一点。采用该种结构 的工业机器人可以使得其运动学算法最为简单可靠。设计的机器人要保证高的定位精度,就 必须尽可能的满足上述条件,通过机械加工及装配精度来保证最终的机器人运行精度控制在 一定范围内。如果机器人的结构与此差别较大的话

abb机器人仿真步骤
格式:pdf
大小:2.6MB
页数:12P
4.4
作图步骤: 1、双击桌面robotstudio5.15图标,如下图所示。 点击左侧选项栏,选择授权。 然后选择激活向导,选择如下: 2、点击创建文件,出现如下界面。 3、选择机器人模型,点击abb模型库,出现如下界面,选择irb2600.把承重能力改为20kg. 4、然后点击导入模型库,下拖选择mytool后,然后把左侧边mytool工具拖到 irb2600-20-165-01,机器人上自动安装了喷头工具。 5、然后点击机器人系统菜单,选择从布局创建系统。 在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下。在主菜单中,一定要 修改工具,把原始的tool10改为mytool。或者,在放入机器人时,即完成此项设置,可以 不需要修改此项。 一直选择下一个,即可成功。 成功后,屏幕右下角变为绿色。 5、选择建模,在菜单中选择固体,再选择矩形体。
铁矿石简易机械取制样设施的工艺设计 铁矿石简易机械取制样设施的工艺设计
格式:pdf
大小:167KB
页数:未知
4.4
本文以福建华电储运码头的铁矿石简易机械取制样设施为例,阐述了铁矿石简易机械取制样设施的主要工艺和设备配置。该装置具有结构新颖、紧凑、自动化程度高、适应性强、性能稳定可靠、操作灵活方便、工作环境舒适等优点,能为矿石检验提供可靠准确的检测依据。
曲轴自动化锻造生产线中机器人夹具设计要点 曲轴自动化锻造生产线中机器人夹具设计要点
格式:pdf
大小:1.4MB
页数:2P
4.8
锻造是利用锻压机械对金属坯料施加压力,产生塑性变形的加工方法,在设备关键零部件生产制造中应用广泛。目前在工业自动化锻造领域中汽车零配件仍然是最大的应用市场,例如曲轴、前桥、转向节、连杆等关键零部件的生产基本全部采用热模锻造方式完成。内燃机中曲轴作为典型的锻造零部件,在自动化锻造中应用非常广泛,目前国内生产曲轴的企业在百家以上。随着国家智能制造2025计划的提出,国内一些曲轴生产企业也掀起了在曲轴锻造生产中开展智能制造的浪潮。目前国内70%的汽车曲轴生产依靠机器人自动化生产线完成。采用机器人自动化生产模式代替传统人工生产模式,提高了生产效率、改善了工作环境、产品质量明显提高。而在机器人自动化锻造生产中机器人夹具的设计一直是整体生产线的关键所在。
机器人技术及焊接自动化
格式:pdf
大小:952KB
页数:3P
4.8
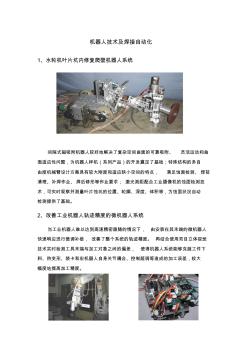
机器人技术及焊接自动化 1、水轮机叶片坑内修复爬壁机器人系统 间隙式磁吸附机器人较好地解决了复杂空间曲面的可靠吸附、灵活运动和曲 面适应性问题,为机器人样机(系列产品)的开发奠定了基础;特殊结构的多自 由度机械臂设计方案具有较大刚度和适应狭小空间的特点,满足蚀面检测、焊前 清理、补焊作业、焊后修形等作业要求;激光测距配合工业摄像机的蚀面检测技 术,可实时观察并测量叶片蚀坑的位置、轮廓、深度、体积等,为蚀面状况自动 检测提供了基础。 2、改善工业机器人轨迹精度的微机器人系统 当工业机器人难以达到高速精密跟随的情况下,由安装在其末端的微机器人 快速响应进行微调补偿,改善了整个系统的轨迹精度。再结合使用双目立体视觉 技术实时检测工具末端与加工对象之间的偏差,使得机器人系统能够克服工件下 料、热变形、装卡和宏机器人自身关节耦合、控制超调等造成的加工误差,较大 幅度地提高加工精度。 3
巡检机器人控制系统整体软件设计 巡检机器人控制系统整体软件设计
格式:pdf
大小:76KB
页数:2P
4.3
在巡检机器人控制系统硬件平台上移植了μc/os-ii嵌入式操作系统;根据该控制系统的实际功能需求,进行了系统主要任务的设计与分配;最后对巡检机器人远程控制平台的显示界面进行了功能性的设计,实现电力隧道巡检机器人远程控制平台与巡检机器人硬件终端的交互功能。
机器人舵机控制器设计 机器人舵机控制器设计
格式:pdf
大小:174KB
页数:未知
4.7
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。在本设计中,我们采用单片机来驱动舵机工作,单片机通过改变输出的pwm信号占空比来控制舵机的转角与转速;舵机能够实现正转、反转、自动旋转等功能;为了更直观地显示转角,我们采用了四位八段数据管用于实时显示。
日照港矿石机械化采制样系统中机器人应用相关
文辑推荐
知识推荐
百科推荐


职位:一级建筑工程师
擅长专业:土建 安装 装饰 市政 园林


