

基于nRF9E5的步进电机无线控制器设计
格式:pdf
大小:439KB
页数:4P
人气 :88
 4.5
4.5
利用无线SOC单片机nRF9E5实现了两相混合步进电机的无线电遥控。给出了无线控制器的硬件电路图。利用C51语言编写了步进电机转速,转向无线遥控程序。利用VisualBasic编写了PC机RS-232控制界面。实验表明:设计的无线遥控器的遥控距离为100m左右,抗干扰能力较强。



 集群系统有/无线控制器的设计
集群系统有/无线控制器的设计 集群系统有/无线控制器的设计
本文以自行研制的“多信道共用通信与报警系统”为例,对系统有/无线控制器做了比较全面的介绍,阐述了利用单片微机技术,实现对系统有/无线接续的控制过程,给出了系统有/无线控制器软件程序流程。
AC无线控制器+AP心得与总结
做过许多无线控制器(ac)的项目,但一直没好好总结整理下关于无线部分的各个知识点。 以前调试仅仅停留于配置完成,能实现无线上网的功能,并没深入的进行研究。这里也主要 阐述下无线控制器配置时的一些需要注意的要点,希望对想学习这方面知识的朋友有所帮助, 涵盖点不一定全,请多指正。 个人认为ac主要是在注册ap有点小难度,其他问题不大。ap在ac上注册有二层注 册和三层注册两种方式。 二层和三层具体的意思在这里不做描述。 其区别之处在于:三层转发要为ap做dhcp服务器,在ac上配置option43选项(后 详细说明)。二层组网方式一般是通过配置trunk端口,允许ap所在的vlan通过,相当 于组建了一条虚拟隧道连接到ac,从而用ac进行管理。三层组网是通过路由的方式让ap 找到ac。二层走的是数据链路层,三层走的是网络层路由功能
编辑推荐下载
基于MC9S08QG8低端微控制器的无线控制器设计 基于MC9S08QG8低端微控制器的无线控制器设计
格式:pdf
大小:528KB
页数:4P
4.5
为改变zigbee无线控制器节点设计中通常需要使用高端微控制器的现状,引入freescale低端微控制器mc9s08qg8配合mc13192无线收发器再加上少量外围元器件,实现了一种zigbee无线控制器的精简硬件设计电路。同时描述了器件选择、总体构建思路与硬件设计细节,最后介绍了该无线控制器的一个实例应用。基于低端微控制器的设计也能够完成无线网络要求的一些基本任务,并且满足无线控制应用中的低功耗、低成本、高性能、多功能等要求。

nRF9E5步进电机无线控制器设计热门文档
5V4相5线步进电机全新步进电机
格式:pdf
大小:15KB
页数:2P
4.4
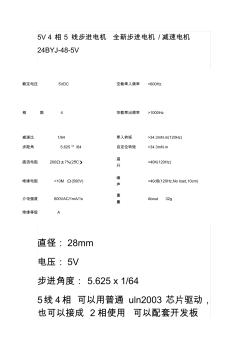
5v4相5线步进电机全新步进电机/减速电机 24byj-48-5v 额定电压5vdc空载牵入频率>600hz 相数4空载牵出频率>1000hz 减速比1/64牵入转矩>34.3mn.m(120hz) 步距角5.625°/64自定位转矩>34.3mn.m 直流电阻200ω±7%(25℃) 温 升 10mω(500v) 噪 声 <40db(120hz,noload,10cm) 介电强度600vac/1ma/1s 重 量 about32g 绝缘等级a 直径:28mm 电压:5v 步进角度:5.625x1/64 5线4相可以用普通uln2003芯片驱动, 也可以接成2相使用可以配套开发板

步进电机升降速曲线控制方法
格式:pdf
大小:45KB
页数:2P
4.5
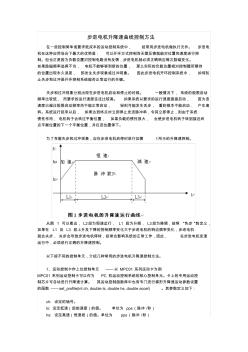
步进电机升降速曲线控制方法 在一些控制简单或要求低成本的运动控制系统中,经常用步进电机做执行元件。步进电 机在这种应用场合下最大的优势是:可以开环方式控制而无需反馈就能对位置和速度进行控 制。但也正是因为负载位置对控制电路没有反馈,步进电机就必须正确响应每次励磁变化。 如果励磁频率选择不当,电机不能够移到新的位置,那么实际的负载位置相对控制器所期待 的位置出现永久误差,即发生失步现象或过冲现象。因此步进电机开环控制系统中,如何防 止失步和过冲是开环控制系统能否正常运行的关键。 失步和过冲现象分别出现在步进电机启动和停止的时候。一般情况下,系统的极限启动 频率比较低,而要求的运行速度往往比较高。如果系统以要求的运行速度直接启动,因为该 速度已超过极限启动频率而不能正常启动,轻则可能发生丢步,重则根本不能启动,产生堵 转。系统运行起来以后,如果达到终点时立即停

步进电机手持控制器的设计与应用
格式:pdf
大小:969KB
页数:9P
4.4
步进电机手持控制器的设计与应用 刘健王旭东周凯 摘要:步进电机有控制方便、定位准确等优点。随着科技的发展步进电机在实际中的应 用越来越广泛。本文主要针对外圆磨床设计了一款手持控制器,本控制器采用了英飞凌公司 生产的xc164cs单片机作为主控芯片,取代了以往的脉冲发生器,采用软件编程的方法产 生控制脉冲,并与步进电机细分驱动器sj-3f110m相连接来控制步进电机转向、转速及布 距脚。通过液晶显示器显示步进电机的运行状态。本控制器还针对磨床的交流伺服电机增添 了da转换功能,从而控制磨削速度。本文设计的控制器简化了设计电路并降低了生产成本, 提高了系统的可靠性和灵活性。 关键词:步进电机;手持终端;磨削速度; thehandcontrollerofthedesignandapplication ofstepmotorbasedon
基于FPGA的步进电机细分控制器的设计 基于FPGA的步进电机细分控制器的设计
格式:pdf
大小:658KB
页数:3P
4.6
随着电子设计自动化(eda)技术的发展,基于可编程逻辑器件的数字电子系统设计方案越来越受到人们的重视。以eda技术为核心、能在可编程逻辑器件上进行系统芯片集成的新设计方法,也正在快速地取代传统设计方式。本设计介绍一种基于可编程逻辑器件(pld),设计步进电机细分控制器的方法。
nRF9E5步进电机无线控制器设计精华文档
智能农田灌溉潜水泵无线控制器设计 智能农田灌溉潜水泵无线控制器设计
格式:pdf
大小:391KB
页数:5P
4.7
针对目前平原农村农田新型低压喷灌灌溉的现实需求,设计了智能潜水泵无线控制器,引入无线低速数据通信技术、单片机接口技术和可靠性设计技术,提出了系统总体设计方案,介绍了软硬件详细设计,并通过实验室和实际应用测试验证本设计能实现农田灌溉潜水泵手动控制和无线远距离遥控控制,同时能实现遥控命令的自动学习,能很好的满足平原农村农田新型低压喷灌灌溉的现实需求。
家庭网络无线控制器的设计与实现 家庭网络无线控制器的设计与实现
格式:pdf
大小:148KB
页数:4P
4.8
本文在对家庭网络的发展现状和各种无线网络接入技术进行研究的基础上,提出了一种基于蓝于技术的家庭无线控制器实现方案,并给出了系统结构图和家庭网络无线控制器的软硬件实现框图。
赛普拉斯发布新型全速USB和低电压无线控制器 赛普拉斯发布新型全速USB和低电压无线控制器
格式:pdf
大小:662KB
页数:2P
4.4
赛普拉斯半导体近日发布其新型encorev全速usb外设微控制器(mcu)和encorevlv(低电压)无线mcu。这一全新高集成度系列产品可提供最多32kb闪存,3个16比特计时器和最多36个通用i/o(gpio),以适应

h3c无线控制器加fit-ap配置实例
格式:pdf
大小:108KB
页数:14P
4.8
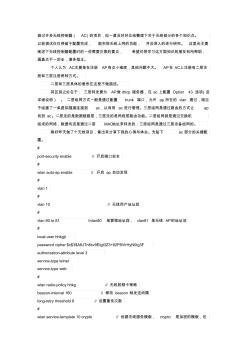
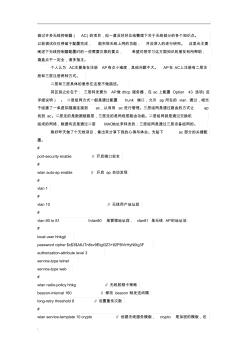
一栋大楼内部组建公共无线网络,考虑到客户端数量可能众多,而客户端频繁 移动可能性不大,规划将无线客户端划分到不同的vlan内,无线ap及接入层交 换机划在一个vlan内。网络连接示意图如下: 无线控制器配置文件: # version5.20,release2308p10 # sysnamewx5004 # domaindefaultenablesystem # port-securityenable # wlanauto-apenable # vlan1 # vlan96 descriptionap-client # vlan97 descriptionap-client # vlan98 descriptionap-client # vlan99 descriptionap-client # vlan100 de
nRF9E5步进电机无线控制器设计最新文档
基于步进电机的流苏丝线绕制机智能控制器的设计 基于步进电机的流苏丝线绕制机智能控制器的设计
格式:pdf
大小:1.3MB
页数:4P
4.3
针对流苏丝线绕制过程中对动力机构的控制要求,系统设计以atmel89s52系列单片机为核心控制器,采用sanyo步进电机作为动力机,利用东芝公司的tb6560ahq步进电机细分驱动器和atmel公司的i2c总线器件at24c02芯片对系统掉电时的实时速度、圈数和转向等数据进行保护,实现了丝线绕制过程中对力矩、转向、速度、圈数和捻度等参数的精确控制,减轻了工人的劳动强度,提高了流苏的生产质量和效率.
5V4相5线步进电机全新步进电机(20201012173143)
格式:pdf
大小:212KB
页数:2P
4.4
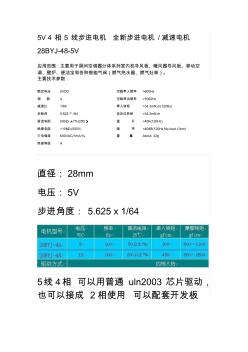
5v4相5线步进电机全新步进电机/减速电机 28byj-48-5v 应用范围:主要用于房间空调器分体系列室内机导风板、暖风器导风板、移动空 调、壁炉、便洁宝和各种智能气阀(燃气热水器、燃气灶等)。 主要技术参数: 额定电压5vdc空载牵入频率>600hz 相数4空载牵出频率>1000hz 减速比1/64牵入转矩>34.3mn.m(120hz) 步距角5.625°/64自定位转矩>34.3mn.m 直流电阻200ω±7%(25℃)温升10mω(500v)噪声<40db(120hz,noload,10cm) 介电强度600vac/1ma/1s重量about32g 绝缘等级a 直径:28mm 电压:5v 步进角度:5.625x1/64 5线4相可以用普通uln2003
多功能消防水炮远程无线控制器
格式:pdf
大小:689KB
页数:9P
4.4
多功能消防水炮远程无线控制器操作说明 该遥控器是上海广域安防科技有限公司,为了方 便消防水炮的现场测控,而倾力打造的一款用于消防 水炮远程无线控制的高科技产品。该多功能消防水炮 远程无线控制器也可用做其他工业控制的无线遥控。 产品概述 多功能消防水炮远程无线控制器是一种可以远程 无线控制消防水炮的上升,下降,线携带与拉放的工 作量,也极大地改善了有线控制器受限于左转,右转, 水花变柱,水花变雾等操作功能。极大地减轻了消防 人员使用传统有线遥控器在进行消防作业时电缆操作 范围小,火灾观测不清楚的缺点;当着火点与水炮控 制器较近时,也减少了消防人员受火灾威胁的风险。 功能特点 按键点数采积木式组合,灵活度高,几点式都方 便。按键采欧制长冲程,高感度,镀金开关。 外壳使用pa及pc材质,耐冲击,防水,防尘。 使用国际标准压入旋出紧急停止开关,安全可靠 性能无双。 使用
一种具有PCMCIA接口的分组无线控制器的实现 一种具有PCMCIA接口的分组无线控制器的实现
格式:pdf
大小:495KB
页数:未知
4.4
文章给出了一种应用于便携计算机上的分组无线网控制器的设计方法.首先简要介绍了pcmcia协议以及实现该协汉的接口芯片tl16pc564b,然后叙述了分组无线网控制器系统的硬件设计和软件设计。
AC无线控制器+AP心得与总结(20201030123122)
格式:pdf
大小:595KB
页数:5P
4.4
. '. 做过许多无线控制器(ac)的项目,但一直没好好总结整理下关于无线部分的各个知识点。 以前调试仅仅停留于配置完成,能实现无线上网的功能,并没深入的进行研究。这里也主要 阐述下无线控制器配置时的一些需要注意的要点,希望对想学习这方面知识的朋友有所帮助, 涵盖点不一定全,请多指正。 个人认为ac主要是在注册ap有点小难度,其他问题不大。ap在ac上注册有二层注 册和三层注册两种方式。 二层和三层具体的意思在这里不做描述。 其区别之处在于:三层转发要为ap做dhcp服务器,在ac上配置option43选项(后 详细说明)。二层组网方式一般是通过配置trunk端口,允许ap所在的vlan通过,相当 于组建了一条虚拟隧道连接到ac,从而用ac进行管理。三层组网是通过路由的方式让ap 找到ac。二层走的是数据链路层,三层走的是
5V步进电机资料-28BYJ
格式:pdf
大小:72KB
页数:2P
4.6
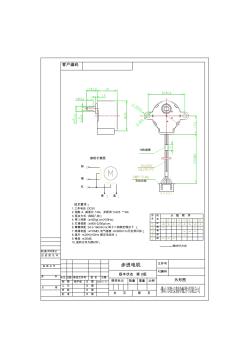
比例重量数量图样标记 第页共页 日期签名修改文件号处数标记 制图 工艺 审核 批准日期 借(通)用件登记 旧底图总号 底图总号 签字 日期 杨宇城 步进电机 k3编码 外形图 文件号 客户编码 版本状态第0版 日期 日期 日期2008-11-17 分配顺序 红 橙 黄 粉 蓝 线 色 序 号 顺时针方向 黄蓝 红 橙 粉 技术要求: 1.工作电压:dc5v 2.相数:4,减速比:1/64,步距角:5.625°/64; 3.驱动方式:四相八拍; 4.牵入转距:≥450gf.cm(100hz); 5.打滑扭距:≥800-2200gf.cm; 6.摩擦转距:34.3-196mn.m(转子二相锁定情况下); 7.绝缘电阻:≥10mω,电气强度:a
多轴步进电机CAN总线控制系统设计 多轴步进电机CAN总线控制系统设计
格式:pdf
大小:163KB
页数:3P
4.5
设计了一种基于can总线的多轴步进电机运动控制系统。系统由pc机、can收发器、can控制器、单片机、步进电机及其驱动器等部分组成。系统由pc机通过can总线向各轴步进电机控制器发送控制命令,实现多轴步进电机的同步运动控制。将各轴步进电机安装在采摘机械手上进行机械手运动控制试验,结果表明该系统稳定可靠。
基于单片机的步进电机细分控制器设计 基于单片机的步进电机细分控制器设计
格式:pdf
大小:205KB
页数:未知
4.4
步进电机细分控制器以51单片机为核心,以l297和l298为驱动,由驱动模块、d/a转换模块和稳压模块三部分组成。通过细分驱动器的驱动,使步距角变小,系统发出电脉冲信号以控制步距脚的细微变化,从而实现细分控制。该系统解决了步进电机低频振荡、高频失步和歩矩角大等问题,使步进电机的控制具有高精度、低振动、低噪音的特点。
步进电机和减速电机的区别
格式:pdf
大小:13KB
页数:2P
4.7
步进电机和减速电机的区别 在回答这个问题之前,先来了解下什么是步进电机和 减速电机? 步进电机是将电脉冲信号转变为角位移或线位移的开 环控制元步进电机件。在非超载的情况下,电机的转速、停 止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变 化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步 进电机按设定的方向转动一个固定的角度,称为“步距角”, 它的旋转是以固定的角度一步一步运行的。可以通过控制脉 冲个数来控制角位移量,从而达到准确定位的目的;同时可 以通过控制脉冲频率来控制电机转动的速度和加速度,从而 达到调速的目的。 减速电机是由减速器(齿轮箱)+电机组成而成,电机 提供的是高速转速,但力矩很小,惯性大;减速器的功能则 是降低转速、提升扭矩,降低惯性,已到达理想的转速和力 矩;比如常见的有电动窗帘、电动卷闸门,都采用了减速电 机,转速慢、力矩大。 简单的说步进电机可以可以定长

步进电机和编码器
格式:pdf
大小:14KB
页数:1P
4.7
1,步进电机为什么要加编码器。 步进电机是执行原件,编码器属于反馈系统,编码器配合步进电机使用, 用plc控制其运行~ 按照原理来讲是plc发送脉冲指令给步进驱动器,驱动器给步进电机提供相应 电流使其运行,当编码器检测到步进电机运行到需要到达的位置的时候会反馈信 号给plc,plc安装反馈的信号停止发送脉冲信号给步进驱动器,当步进电机 没有了电动原提供电流当然也会立刻停止运行。(伺服电机就是此种装置),其 实编码器会不停的反馈当前位置给plc,plc根据反馈值与目标值进行比较, 调整转子转动的角度。 当然会不会停稳,停止后是不是自己想要的位置,这个要看电机有无 制动装置?当然低速运行的话,一般进给精度都能满足~ 还有一种就是提前计算好步进电机进给需要的脉冲数,然后用plc编程,运行 这么多脉冲数,步进电机停止,编码器反馈此时电机位置,形成半
nRF9E5步进电机无线控制器设计相关
文辑推荐
知识推荐
百科推荐


职位:岩土设计师
擅长专业:土建 安装 装饰 市政 园林


