

新型轮腿配合式排水管道检测机器人控制系统设计
格式:pdf
大小:872KB
页数:4P
人气 :69
 4.6
4.6
提出了一种新型轮腿配合式管道机器人的设计思想。机器人通过轮式驱动和腿式驱动二者的相互配合,兼有轮式机器人移动速度快及腿式机器人环境适应能力强等优点。对机器人结构及组成进行了设计,运用重心偏移的方法保证机器人腿式行进时不发生侧翻。对整个机器人的控制系统进行设计,包括主机控制系统的单片机硬件设计、移动载体和CCD摄像头控制系统的软件结构设计。



 手动机器人控制系统设计
手动机器人控制系统设计 手动机器人控制系统设计
手动机器人对于机器人比赛的制胜起着举足轻重的作用,首先提出了手动机器人控制系统设计方案,然后根据控制方案分别进行了硬件、软件的设计,最后总结了设计调试过程中的心得体会。
编辑推荐下载
排水管道检测评估技术规程
格式:pdf
大小:722KB
页数:47P
4.3
1总则 1.0.1为了统一天津市排水管道检测的技术要求,规范检测工作的实施,保证其成 果的质量,及时、准确地为城市排水规划、设计、施工、抢险以及建设管理提供准确的 技术资料和决策依据,以适应现代化城市建设发展的需要,制定本规程。 1.0.2本规程适用于公共排水管道的检测。 1.0.3排水管道检测评估工作,应遵循客观、科学和高效的原则,积极采用先进的 检测和评估手段,保证检测与评估结果准确可靠。 1.0.4各级排水管理部门与市政管理机构,应加强对排水管道检测评估工作的监 督,建立和完善相关规章制度,提高排水管道检测评估工作技术水平。 1.0.5公共排水管道的检测评估,除按本规程规定执行外,还应遵守国家和行业其 他相关标准、规程的规定。 2管道检测评估术语 2.0.1管段pipesection 两座检查井之间的管道。 2.0.2新建排水管道newsewerage
轮腿配合式排水管道检测机器人控制系统设计热门文档
可变径煤矿管道检测机器人的设计 可变径煤矿管道检测机器人的设计
格式:pdf
大小:1.4MB
页数:4P
4.7
在煤矿生产中使用大量的管道,其质量关系到整个煤矿的安全和高效生产。为提高管道寿命,预防管道老化、腐蚀及断裂等问题,并实现高效准确地故障诊断,笔者设计了一种可变径管道检测机器人,并建立了机器人三维模型,利用adams对其进行运动仿真,从而验证了机器人在直径为220~300mm的管道中自由行走和检测的可行性。
一种新型排水管道清淤机器人控制系统的设计 一种新型排水管道清淤机器人控制系统的设计
格式:pdf
大小:2.6MB
页数:4P
4.8
介绍了一种用于排水管道清淤和检测的机器人机构及工作原理,该机器人采用了履带式行走机构和管道直径调节机构,以st89c58单片机为控制核心,通过压力传感器的反馈值,自主地控制管道直径调节机构。同时对驱动电动机控制、速度传感器以及光电编码器在机器人中的应用进行了详细介绍。经论证表明:该系统具有结构紧凑、适应性强、牵引力大、去淤彻底等特点。
CCTV排水管道检测标准
格式:pdf
大小:609KB
页数:3P
4.7
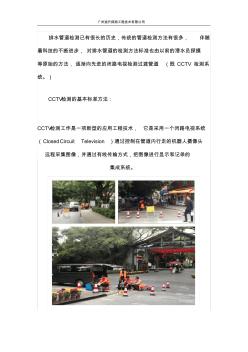
广州迪升探测工程技术有限公司 排水管道检测已有很长的历史,传统的管道检测方法有很多,伴随 着科技的不断进步,对排水管道的检测方法标准也由以前的潜水员探摸 等原始的方法,逐渐向先进的闭路电视检测过渡管道(既cctv检测系 统。) cctv检测的基本标准方法: cctv检测工作是一项新型的应用工程技术,它是采用一个闭路电视系统 (closedcircuittelevision)通过控制在管道内行走的机器人摄像头 远程采集图像,并通过有线传输方式,把图像进行显示和记录的 集成系统。 广州迪升探测工程技术有限公司 管道cctv电视检测系统是由三部分组成:主控器、操纵线缆架、 带摄像镜头的“机器人”爬行器。主控器可安装在汽车上,操作员通过主 控器控制“爬行器”在管道内前进速度和方向,并控制摄像头将管道内部 的视频图像通过线缆传输到主控器显示屏上,操作员可实时的监测管道

排水管道检测报告样本
格式:pdf
大小:4.1MB
页数:15P
4.7
上海凯顺市政建设工程有限公司电话:021-69000879 kaishunshanghaimunicipalconstructionengineeringco.,ltd传真:021-69000879 浦东新区巨峰路排水管道cctv检测报告 浦东新区巨峰路排水管道检测项目 cctv检测评估报告书 报告执行标准:db31/t444-2009 项目负责人:乔国胜 报告编写人:王凤仙 报告审核人:张伟 上海凯顺市政建设工程有限公司 kaishunshanghaimunicipalconstructionengineeringco.,ltd. 2015年03月 上海凯顺市政建设工程有限公司电话:021-69000879 kaishunshanghaimunicipalconstructionenginee
轮腿配合式排水管道检测机器人控制系统设计精华文档
分布式擦窗机器人控制系统设计 分布式擦窗机器人控制系统设计
格式:pdf
大小:355KB
页数:未知
4.8
根据试验平台对开放性、实时性和可靠性的需求,为"蓝天洁士-4"型擦窗机器人设计了分布式控制系统。系统以arm微控制器和avr单片机组成的上下位机构成机器人本体控制器,以pc机构成机器人监控和规划器。为了兼顾系统的安全性和开放性,在机器人本体控制器的上位机中采用了基于μc/os-ⅱ的rtos作为开发平台,在pc机上利用动态链接库封装机器人底层动作和信息查询指令。给出了多任务系统的任务划分规则,利用多线程实现了监控软件,分析了动作线程和查询线程的工作流程。
基于模糊控制的排水管道自主清淤机器人 基于模糊控制的排水管道自主清淤机器人
格式:pdf
大小:320KB
页数:未知
4.5
为了替代人工完成地下排水管道清淤工作,提出一种可以在电动机的驱动下沿着排水管道自主行走,同时对伸入管内的树枝或油污沉积形成的钙化物进行自动清理的新型机器人。利用光电编码器、倾角传感器和超声波传感器实时检测机器人工作状态和作业环境的变化,并通过引入模糊控制算法,实现驱动步进电动机过载调整、机器人姿态调节以及基于载荷变化的速度调节,从而极大地提升了机器人的自主作业能力,为获得更好的清淤效果奠定了理论基础。
内作业机器人管道检测实验系统研究
格式:pdf
大小:29.8MB
页数:99P
4.4
놱뺩릤튵듳톧쮶쪿톧캻싛컄믹폚ccd뗄맜쓚ퟷ튵믺웷죋맜뗀볬닢쪵퇩쾵춳퇐뺿탕쏻ꎺ훜쇺짪쟫톧캻벶뇰ꎺ쮶쪿튵ꎺ닢쫔볆솿벼쫵벰틇웷횸떼뷌쪦ꎺ뫎듦뢻20070501 믹폚ccd뗄맜쓚ퟷ튵믺웷죋맜뗀볬닢쪵퇩쾵춳퇐뺿ퟷ헟ꎺ훜쇺톧캻쫚폨떥캻ꎺ놱뺩릤튵듳톧쿠쯆컄쿗(1쳵ì1.톧캻싛컄헅탱쏷뇤뺶췤맜쓚죤뚯쪽럂짺믺웷죋벰쫓뻵볬닢벼쫵퇐뺿2005릤튵훐닉폃쇋듳솿평틬훖룖몸뷓뷸탐솪뷡뗄맜뗀ꎬ헢샠맜뗀퓚뎤웚럾틛맽돌훐ꎬ틲룷훖췢뷧틲쯘뗄ퟷ폃ꎬ퓚틬훖룖몸뷓뷓춷늿캻뿉쓜돶쿖좱쿝ꎬ캪럀횹킹슩뗈쫂맊뗄랢짺ꎬ뇘탫뛔맜뗀뷸탐폐킧뗄볬닢캬뮤ꆣ떫쫇ꎬ쳘쫢릤튵훐뗄튻킩맜뗀웤뷡릹럇뎣뢴퓓ꎬ늻뷶맜뺶뇤뮯뛸쟒냼몬쟺싊냫뺶뷏킡뗄췤쟺뷡릹ꎬ쫜맜뗀쓚늿뿕볤벰뷡릹뗄쿞훆ꎬ컞램닉폃죋릤쫖뛎뷸탐볬닢ꎬ뛸뎣맦뗄맜뗀믺웷죋뫜쓑뷢뻶퓚헢훖뢴퓓맜뗀쓚뗄춨맽탔컊쳢ꎻ
通风管道检测机器人设计 通风管道检测机器人设计
格式:pdf
大小:478KB
页数:3P
4.4
设计了通风管道检测机器人,介绍了该机器人的主要结构和功能,阐述了测控系统的工作原理,给出了电路原理图和软件设计流程。该通风管道检测机器人还能对积尘取样。
轮腿配合式排水管道检测机器人控制系统设计最新文档
城市排水管道缆控清淤机器人的研究 城市排水管道缆控清淤机器人的研究
格式:pdf
大小:1.4MB
页数:4P
4.3
介绍了一种用于排水管道清淤的机器人机构及工作原理,该机器人采用周向120°等间距布置的三副齿轮齿条结构,由三台电机分别控制,并且以at89s51单片机为控制核心,通过压力传感器mcl-l测量轮子对管壁的压力值与设定值进行比较来实现控制适径机构的伸缩,增强了系统的鲁棒性和适应性;通过光电传感器来检测机器人是否到达检查井口来实现机器人的自主性行为;用超声波传感器实现绞刀机构的径向移动,以满足不同管径清淤的需要。方案论证表明:该系统具有结构紧凑、适应性强、牵引力大、去淤彻底等特点。
蠕动式排水管道机器人研制 蠕动式排水管道机器人研制
格式:pdf
大小:293KB
页数:4P
4.4
简要综述了国内外排水管道清淤作业机器人的结构方案,分析了各自特点和局限性。提出了一种基于组合机构的新型蠕动式排水管道机器人。给出了机器人主要结构组成,以及行走机理分析,建立了其行走运动模型和驱动力矩分析模型,给出了主要影响参数以及数值分析。最后,建立了机器人的虚拟样机,完成了其虚拟样机仿真分析。综合理论数值分析和虚拟样机仿真分析验证了方案的可行性和设计理论及分析结论是正确的。该方案的排水管道清淤作业机器人具有大拖动力、作业距离长的特点。
牵引式排水管道清淤机器人的研究 牵引式排水管道清淤机器人的研究
格式:pdf
大小:268KB
页数:4P
4.3
研究了一种新型排水管道清淤机器人,对其组成及工作原理做了论述,以及对基于plc的软、硬件控制做了详细介绍。用钢丝绳牵引装置带动清淤车体连同清淤斗完成有载清淤作业,保证清淤作业有足够的牵引力。通过清淤机器人本体自带动力源带动清淤斗在管道内部空载运动,代替了传统清淤机器人沉重的有缆作业。通过监控系统适时监控管道内部清淤作业状况,采用无线通讯方式传输数据,根据作业要求完成对清淤动作的控制。
巡检机器人控制系统整体软件设计 巡检机器人控制系统整体软件设计
格式:pdf
大小:76KB
页数:2P
4.3
在巡检机器人控制系统硬件平台上移植了μc/os-ii嵌入式操作系统;根据该控制系统的实际功能需求,进行了系统主要任务的设计与分配;最后对巡检机器人远程控制平台的显示界面进行了功能性的设计,实现电力隧道巡检机器人远程控制平台与巡检机器人硬件终端的交互功能。
排水管道检测评估技术规程完整
格式:pdf
大小:363KB
页数:46P
4.7
专业资料 word完美格式 1总则 1.0.1为了统一天津市排水管道检测的技术要求,规范检测工作的实施,保证其 成果的质量,及时、准确地为城市排水规划、设计、施工、抢险以及建设管理提供准确 的技术资料和决策依据,以适应现代化城市建设发展的需要,制定本规程。 1.0.2本规程适用于公共排水管道的检测。 1.0.3排水管道检测评估工作,应遵循客观、科学和高效的原则,积极采用先进 的检测和评估手段,保证检测与评估结果准确可靠。 1.0.4各级排水管理部门与市政管理机构,应加强对排水管道检测评估工作的监 督,建立和完善相关规章制度,提高排水管道检测评估工作技术水平。 1.0.5公共排水管道的检测评估,除按本规程规定执行外,还应遵守国家和行业 其他相关标准、规程的规定。 专业资料 word完美格式 2管道检测评估术语 2.0.1管段pipesection
对《城镇排水管道检测与评估技术规程》编制的建议
格式:pdf
大小:13KB
页数:3P
4.3
对《城镇排水管道检测与评估技术规程》编制的建议 摘要: 关键词: 一、前言 二、电视检测部分的意见 公正 周勇 北京水明钰科技有限公司 《城镇排水管道检测与评估技术规程》征求意见稿近期已经出现在网络上,作者没有花 过多的精力去辨别此稿的真伪,但对照其内容与之前发行的上海地方标准和广州相关文件来看, 其稿应该为规范编制组发布的,作者结合自己的从业经验对该征求意见稿发表部分浅见,希望 能对规程编制起到抛砖引玉的作用。 排水检测评估建议 根据住房和城乡建设部《关于印发年工程建设标准规范制订、修订计划的通知》(建 标号)的要求,由广州市市政集团有限公司会同有关单位共同编制的《城镇排水管道 检测与评估技术规程》(以下简称《规程》)行业标准已完成征求意见稿。 《规程》的主要技术内容包括:总则;术语和符号;基本规定;电视检测; 声纳检测;管道潜望镜检测;传统方法检查;管
排水管道检测与非开挖修复技术的应用
格式:pdf
大小:177KB
页数:3P
4.4
第2期(总第132期) 2008年4月 no.2(serialno.132) apr.2008chinamunicipalengineering 收稿日期:2008-01-25 排水管道检测与非开挖修复技术的应用 李通,刘华平 (上海乐通管道工程有限公司,上海200233) 摘要:城市地下管网系统错综复杂,燃气、上水、排水系统又相互独立。随着管网系统日益老化,加之地面道路环境 复杂,无法对管网系统的运行现状进行有效检查,致使路面下陷、水管暴管、燃气泄露等恶性事故发生。介绍无须动 土或尽量减少开挖面积的情况下,对管网系统进行管道电视检测、非开挖的cipp翻转法、非开挖的u型折叠内衬等管 道修复技术。 关键词:排水管道;电视检测;非开挖;修复 中图分类号:u178文献标识码:b文章编号:1004-655(2008)02-004
空调外机壳体孔加工机器人控制系统设计 空调外机壳体孔加工机器人控制系统设计
格式:pdf
大小:181KB
页数:1P
4.7
空调外机壳体孔机器人是一种新型的利用液压技术并采用plc控制的冲压机器人。相对于传统的压孔机床,孔机器人外形小,工作环境噪声低,能源利用率高,特别适合薄壁元件的加工,稳定性高,使用安全,可以根据实际需要自行选取控制。因此研究和设计这样一种新型的压孔机器人代替传统的机械式机床具有现实的意义。
圆弧形腿机构六足机器人的结构和控制系统设计 圆弧形腿机构六足机器人的结构和控制系统设计
格式:pdf
大小:581KB
页数:5P
4.5
针对轮式移动机器人越障能力不足的问题,设计出了一种兼具轮式和足式移动机构特点的圆弧腿仿生六足机器人。完成了基于飞思卡尔mc568037型dsp及can总线的机器人控制系统的设计;对机器人的运动步态、静力学及运动学模型进行了研究,并采用adams仿真软件对运动学模型进行了验证;提出了一种基于三角函数规律的电机转速曲线。最后对电机驱动系统、机器人的越障及转向性能进行了测试。实验结果表明,机器人驱动电机的控制系统具有良好的响应特性,机器人可通过30cm高的障碍,并且具有较小的转向半径,环境适应性强。
轮腿配合式排水管道检测机器人控制系统设计相关
文辑推荐
知识推荐
百科推荐


职位:水利工程标准员
擅长专业:土建 安装 装饰 市政 园林


