

非相干光反馈表面轮廓测量实验研究
格式:pdf
大小:867KB
页数:5P
人气 :98
 4.7
4.7
数值研究了非相干光反馈时半导体激光器输出功率随反馈系数的变化关系以及待测物体离焦量与反馈系数的关系。提出了基于非相干光反馈的表面轮廓测量系统,并实验验证了系统的可行性,完成了对一元硬币的二维平面扫描成像,并分析了实验结果中的误差以及可能影响测量结果的主要因素。



 基于非相干光反馈的表面轮廓测量仿真研究
基于非相干光反馈的表面轮廓测量仿真研究 基于非相干光反馈的表面轮廓测量仿真研究
对一种基于非相干光反馈的表面轮廓测量方法,对其进行了理论仿真研究。建立了基于非相干光反馈表面轮廓测量的系统模型,分析了不同反馈光耦合强度的输出特性,系统的稳定状态,注入电流对系统的影响,以及反馈强度和表面深度的关系结果证明该方法的可行性.研究结果对系统参数设计具有参考价值。
非相干光纤组束激光的光束质量分析 非相干光纤组束激光的光束质量分析
为了提高非相干光纤组束激光的光束质量,对影响光束质量的诸参数进行了分析。理论分析和数值计算结果表明,离焦量ε、透镜焦距f、组束阵列宽度w以及由光栅引入的角偏移θ_b是影响组束激光光束质量的重要因素。提出了一种采用双光栅组束结构抑制角偏移θ_b的方法。该结构仅适用于远场发散角θ_0与θ_b量级相当的情况。
编辑推荐下载

表面粗糙度轮廓度测量仪招标文件
格式:docx
大小:61KB
页数:40P
3
表面粗糙度轮廓度测量仪招标文件——2.合格的投标人 2.1凡有能力按照本招标文件规定的要求交付货物、工程和服务的投标单位均为合格的投标人。 2.2投标人参加本次政府采购活动应当符合《中华人民共和国政府采购法》第二十二条的规定并具备招标文件第...
线结构光三维轮廓测量系统的标定方法 线结构光三维轮廓测量系统的标定方法
格式:pdf
大小:1.4MB
页数:7P
4.6
在线结构光360°三维轮廓测量方法中,采用多图像传感器系统可实现物体整体轮廓及局部形貌细节同时高精度测量。为了实现测量系统多传感器同时标定,提出一种线结构光多传感器三维轮廓测量系统的标定方法。以直接线性变换法为系统标定模型,设计含有多特征点的靶标控制场来解算系统模型参数,应用二元全区间插值误差校正方法对物方坐标计算误差进行校正,实现对整个测量系统的标定。并提出了一种基于二维离散傅里叶变换的多分辨率标定靶标特征点提取的新方法。论述了线结构光四传感器测量系统的标定过程。实验结果表明这种标定方法可实现多传感器测量系统高精度同时标定。
非相干光反馈的表面轮廓测量仿真热门文档
弧面凸轮廓面三坐标机测量与传动质量评价 弧面凸轮廓面三坐标机测量与传动质量评价
格式:pdf
大小:725KB
页数:4P
4.6
在分析了弧面凸轮廓面数学模型的基础上,利用三坐标测量机对弧面凸轮廓面进行了等径点位测量,并提出了一种逐点比较法,将所有的测量数据用于确定凸轮坐标系与测量坐标系的位置关系。用非均匀b样条曲线拟合所有凸轮坐标系中的点坐标数据,由拟合曲线和滚子共轭运动的啮合方程求解实际共轭运动,从而评价弧面凸轮廓面的传动质量。最后,通过一个检测实例验证了该算法的正确性和可行性。
挠性印刷电路板用超低轮廓铜箔的表面处理工艺 挠性印刷电路板用超低轮廓铜箔的表面处理工艺
格式:pdf
大小:1.6MB
页数:7P
4.4
研究了挠性印制电路板(fpc)用超低轮廓(vlp)电解铜箔的表面处理工艺。在硫酸铜与硫酸的混合电解液中,以连续旋转鼓状钛筒为阴极,在50~80a/dm2的电流密度下电沉积得到12μm厚的铜箔,再以(20±0.1)m/min的速度对铜箔进行表面处理:在其光面进行分形电沉积铜,然后电沉积纳米锌镍合金,再经过三价铬钝化处理并涂覆一层硅烷偶联剂。处理后的铜箔光面呈黑色,粗糙度为1.2~2.0μm,毛面粗糙度≤2.5μm,不含铅、汞、镉、砷等有害元素,具有优异的抗剥离强度以及抗氧化、耐腐蚀和蚀刻性能,可以替代同类型的进口铜箔,应用于fpc制作和高密度互联(hdi)内层板等。以该工艺生产的vlp铜箔已在fpc生产厂家获得应用。
采用VC++编程对石材大板表面轮廓提取的研究 采用VC++编程对石材大板表面轮廓提取的研究
格式:pdf
大小:710KB
页数:4P
4.8
本文采用ccd摄像机、图像采集卡和计算机来实现非接触测量系统的硬件搭建,构成了基于ccd技术的石材大板在线测量系统,解决了天然石材传统接触式尺寸测量方法的缺陷。由ccd采集的彩色石材大板图像通过图像处理技术并结合vc++编程实现了图像灰度变换、平滑处理、图像分割和数学形态学处理过程,快速完成了石材大板表面轮廓提取,为进一步对石材大板表面尺寸在线测量提供了理论和实践基础。
连续变焦光机系统凸轮轮廓设计 连续变焦光机系统凸轮轮廓设计
格式:pdf
大小:710KB
页数:4P
4.6
介绍了光学连续变焦物镜的工作原理以及光路计算过程。对绘图法设计凸轮轮廓产生误差的原因进行了简单分析。利用pro/e设计软件,对凸轮零件轮廓进行了三维详细设计,准确还原了连续变焦光学系统中变倍组和补偿组透镜的运动规律,提高了凸轮轮廓的设计精度。
触针式轮廓仪弹性测量杆的设计 触针式轮廓仪弹性测量杆的设计
格式:pdf
大小:204KB
页数:2P
4.5
针对传统的触针式轮廓仪杠杆式测量杆的转动支点由于滚动体跳动容易引入随机误差的问题,提出并设计了一种基于弹性变形理论的轮廓仪测量杆。利用高精度电容传感器测量测量杆的弹性变形量,然后利用悬臂梁的挠曲线公式求出触针针尖的位移量从而得到待测面的微观不平度信息,消除了杠杆式测量杆引入的随机误差,进一步提高了粗糙度测量精度。
非相干光反馈的表面轮廓测量仿真精华文档
基于图像处理技术的石材大板表面轮廓提取算法 基于图像处理技术的石材大板表面轮廓提取算法
格式:pdf
大小:617KB
页数:5P
4.8
目的研究石材大板表面轮廓提取算法,实现石材大板的在线测量,解决国内石材企业不能对板材进行在线测量和数控加工问题.方法采用ccd摄像机、图像采集卡和计算机来实现非接触测量系统的硬件搭建,构成基于ccd技术的石材大板在线测量系统,利用数字图像处理技术进行石材大板表面廓形特征提取.用vc++编程实现图像灰度变换、平滑处理、图像分割和数学形态学处理过程,完成了石材大板表面轮廓提取.结果通过ccd图像采集系统可以完成石材表面廓形提取,提取的廓形达到了石材设计要求.结论利用灰度变换、平滑处理、图像分割和数学形态学等图像处理技术完成的石材表面轮廓提取,为进一步高精度尺寸计算提供基础.对利用矿山资源,节能减排具有重要意义.

太阳能轮廓标与普通轮廓标的对比与分析
格式:pdf
大小:6KB
页数:3P
4.7
太阳能轮廓标与普通轮廓标的对比与分析 一、技术产生的背景 跟着平原区、丘陵区和各省市经济较发达的地区高速公路建设的逐步完善,高速公路建 设的重点正逐步向山岭区和经济发展相对滞后的山区转移,山区高速公路,风速受山脉河谷 影响较为明显,均匀风速仅1.2m/s,湿润多雨的天气前提加上植被繁茂的森林环境,因此 该路段经常有雾产生。高速公路因雾形成的低能见度交通环境对于交通的安全与畅通十分不 利。 并且因为高速公路通常跨越间隔较长,特别是良多高速公路都通过农村和山区,使得高 速公路的情况相对变得复杂。雾的分布往往很不平均,有时会在一个路段上视线相称明朗、 而在另一个路段却大雾弥漫。因为这种情况通常发生在夜间,高速行驶的车辆溘然驶入大雾 区,驾驶员会感到视觉溘然变暗,有些驾驶员不能适应视力的溘然变化,便会产生一种恐慌 感,从而轻易引发交通事故。 与普通轮廓标比拟,太阳能轮廓
GPU加速的光滑轮廓线绘制 GPU加速的光滑轮廓线绘制
格式:pdf
大小:1.7MB
页数:3P
4.5
轮廓线的高效提取是非真实感绘制的一个关键问题。提出了一个完全利用gpu生成光滑轮廓线的高效算法。在几何处理阶段,先根据相邻三角形的法向量与视向量的关系检测出轮廓线,然后对轮廓线进行宽度扩充,同时对轮廓线顶点设置相应的渐变因子;在像素处理阶段把渐变因子转化为相应的alpha值,通过光照生成卡通渲染,最后通过alpha混合得到光滑轮廓线。算法完全在gpu里实现,能满足实时的绘制要求。
非相干光反馈的表面轮廓测量仿真最新文档
圆柱凸轮轮廓的三坐标测量法研究及应用 圆柱凸轮轮廓的三坐标测量法研究及应用
格式:pdf
大小:385KB
页数:4P
4.6
介绍用三坐标测量机基于等分度测量法完成圆柱凸轮轮廓轨迹的自动测量及程序设计,讨论其实际轮廓面在cad/cam中的生成,分析其制造和质量控制方法。
断层测量反求工程中的封闭轮廓集分割技术 断层测量反求工程中的封闭轮廓集分割技术
格式:pdf
大小:597KB
页数:4P
4.5
针对由序列断层测量轮廓的三维重建,提出了基于物体结构特征的封闭轮廓集分割算法.算法中首先采用多边形的包含判定、封闭轮廓截面属性(如面积、形心位置、内外属性等)的比较对轮廓进行粗略分割,若不能分割出唯一轮廓时,进而通过轮廓串比较的方法作出筛选.为了解决复杂结构的轮廓集分割,算法同时采用了分段重构与拼合的分割策略.结果表明,文中的算法不仅分割速度快,分割轮廓准确,而且适用于具有复杂形状和结构的零件.
多模光纤产生用于大气光通信的部分相干光源 多模光纤产生用于大气光通信的部分相干光源
格式:pdf
大小:860KB
页数:5P
4.4
克服大气湍流对近地大气光通信质量影响,可归结为在接收端的照明均匀化,而采用部分相干光照明则是提高照明均匀性的一种有效途径。提出利用多模光纤的模间色散产生一个具有部分相干光特性的合成光源的方法,分析了该光源的产生原理,表明光束发散角由光纤芯径和发射透镜的焦距决定,由模间色散产生的光程差越大,该合成光源的空间相干性越差。仿真结果表明形成1mrad远场发散角的合成光源是可行的,因而适于在空间光通信中应用。
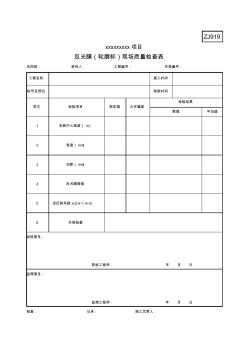
反光膜(轮廓标)现场质量检查表
格式:pdf
大小:17KB
页数:1P
4.6
zj919 工程名称施工时间 桩号及部位检验时间 平均值 1 2 3 4 5 6 监理意见: 监理工程师:年月日 检查:记录:施工负责人: 项次规定值允许偏差检验项目 外观检查 自检意见: 质检工程师:年月日 间距(mm) 反光膜等级 逆反射系数(cd.lx-1.m-2) 检验结果 数值 安装中心高度(m) 宽度(mm) xxxxxxxxx项目 反光膜(轮廓标)现场质量检查表 合同段:承包人:
滤波窗的选择对傅里叶变换轮廓术测量精度的影响 滤波窗的选择对傅里叶变换轮廓术测量精度的影响
格式:pdf
大小:589KB
页数:3P
4.7
比较了在有噪声和无噪声的情况下,傅里叶变换轮廓术中采用三种频域滤波窗对测量精度的影响。给出了在有噪声和无噪声情况下,ftp中采用不同滤波窗的测量误差分布图。得出在无噪声及噪声较小的情况下,采用平顶高斯滤波窗测量面形精度最高,而在噪声较大的情况下,采用汉宁滤波窗测量面形精度最高。
反馈电压偏置型Hopfield网络电域盲检测相干光通信信号 反馈电压偏置型Hopfield网络电域盲检测相干光通信信号
格式:pdf
大小:395KB
页数:未知
4.7
为解决无线分集相干光接收机的自适应盲检测问题,提出了一种新的离散时间连续状态的网络输出反馈偏置型的复hopfield神经网络用以解决多值qam信号的盲检测问题。反馈电压偏置的引入即不脱离传统hopfield模型,又能有效满足多值信号检测时所需的搜索空间变大的特殊要求。全文完成多值信号盲检测的优化问题构造和能量函数的映射,给出能量函数的证明、分析和它的约束条件,给出适用该问题的激活函数的基本特征,正确盲检测信号的权矩阵的配置方法。最后,通过详细的仿真结果展示和与其他算法性能对比进一步验证算法的有效性和优越性并指出算法所存在的问题和下一步的研究方向。
触针式轮廓测量误差修正算法 触针式轮廓测量误差修正算法
格式:pdf
大小:189KB
页数:未知
4.4
本文在介绍触针式二维轮廓测量仪基本工作原理的基础上,分析触针测量方式的固有误差和缺陷;设计了有效的误差修正算法,弥补触针式轮廓测量的固有误差;引进了形态学滤波算法,有效地滤除噪声、振动等干扰信号并保留了有用信息,同时补偿了由触针半径引入的测量误差,提高了仪器测量精度.
新的基于条纹投影轮廓测量的系统标定方法 新的基于条纹投影轮廓测量的系统标定方法
格式:pdf
大小:542KB
页数:未知
4.4
提出一种新的光栅条纹投影轮廓测量术系统标定模型,新模型不要求投影装置和成像系统的光心连线与参考面平行、成像系统的光轴垂直于参考面及投影装置和成像系统的光轴相交。基于该模型得出了新的相位高度映射关系,其待定系数与成像点的坐标无关。实际测量中只需2个高度不同的标准块便可以求得待定系数。对4个标准块进行高度测量,得到的最大相对误差为0.6%。实验证明:该标定方法简单有效,提高了系统标定的可操作性和测量精度。
基于BP和RBF网络结合的相位测量轮廓术系统标定 基于BP和RBF网络结合的相位测量轮廓术系统标定
格式:pdf
大小:914KB
页数:4P
4.3
相位测量轮廓术(pmp)是目前众多光学三维测量方法中比较成熟可靠的一种,其系统标定包括z和(x,y)坐标标定。在借鉴传统标定方法优缺点的基础上,提出了一种基于bp和rbf神经网络结合的pmp系统面内标定新方法,该方法将黑白棋盘图案在有效视场内沿世界坐标系z轴多次放置,获取数据样本。在bp网络对数据样本进行训练和仿真后,利用rbf网络对误差数据进行训练和测试。实验中,bp网络训练步数仅为21步,rbf网络测试样本的平均距离误差仅为0.008mm,此方法具有较高的标定效率和标定精度。
基于绝对相位编码的高速三维轮廓测量系统 基于绝对相位编码的高速三维轮廓测量系统
格式:pdf
大小:335KB
页数:未知
4.5
为了实现对复杂物体三维外形的快速测量目的,首先设计了一套基于结构光的高速测量系统,该系统主要由高速投影模块和图像采集模块组成;然后采用一种基于绝对相位的编码和解码方法,实现绝对相位的测量,从而解决了复杂形体的三维测量过程中的二义性问题。最后,对所给系统进行了三维测量的实验验证,证明该系统精度可达到0.11mm,实验结果表明系统的精度和速度适合高速三维测量。
非相干光反馈的表面轮廓测量仿真相关
文辑推荐
知识推荐
百科推荐


职位:项目建筑师
擅长专业:土建 安装 装饰 市政 园林


