

一种单向伸缩式管道机器人系统的建模与仿真
格式:pdf
大小:874KB
页数:4P
人气 :70
 4.5
4.5
介绍了基于单向运动机构的伸缩式管道机器人工作原理,对管道机器人整机系统进行合理简化,得到等效系统模型。根据等效模型,分析直流伺服电机、滚珠丝杠,以及单向运动机构的动力学行为。为了研究系统的输入电压信号和输出的运动速度之间的关系,建立了机器人系统的完整框图模型。利用M atlab对机器人系统进行仿真,分析不同输入信号下系统的响应特性,为管道机器人的机构设计和控制器设计提供理论依据。



可变径管道机器人系统的设计与研究
第41卷2013年第4期 本 栏 目 编 辑 陆 秋 云 通 用 124 可变径管道机器人系统的 设计与研究 武 燕1,王才东2,王新杰2,牛志军2 1 河南机电职业学院机械工程系 河南郑州 451191 2 郑州轻工业学院机电工程学院 河南郑州 450002 摘要:笔者在分析管道机器人国内外发展现状基础上,针对管道机器人对不同管径需求,提出了一种 双履带式可变径管道机器人的总体方案。设计了机器人的驱动装置、直径调节机构等关键部件,并设 计了机器人的控制系统,该控制系统上采用了上、下位机控制结构,通过手动和自动2种控制模式, 实现机器人无级调速、前进、后退、转弯和图像信息采集等功能。研究结果为可变径管道机器人的实 用化开发奠定了基础。 关键词:管道机器人;变管径;穿缆;控制系统 中图分类号:tp242 文献标志码:a 文章编号:1001-3954
 基于凸轮自锁原理的伸缩式管道机器人设计
基于凸轮自锁原理的伸缩式管道机器人设计 基于凸轮自锁原理的伸缩式管道机器人设计
为提高伸缩式管道机器人的负载能力,研制一种基于凸轮自锁原理的伸缩式管道机器人,牵引力不受限于某一固定摩擦力,可随外载荷的增大而增大。应用分析力学原理导出单向锁止机构各参数应满足的关系式,并给出可适应管径变化的凸轮轮廓设计方法,计算出移动机构系统的响应时间,提出一套系统的管道机器人设计理论方法。利用提出的设计方法研制试验样机,并在管道中成功进行一系列试验。研究成果提升了伸缩式管道机器人的负载能力与管道适应性,完善了基于自锁原理伸缩式管道机器人的设计理论。
编辑推荐下载
螺旋轮式管道机器人设计及其制作
格式:pdf
大小:1.1MB
页数:11P
4.3
课程设计 螺旋式管道机器人 机器人总体方案设计 1设计方案过程及特点 按照上述的过程方案,由三维建模可以进一步确定机器人的可靠外形结构。 安装加工出的理想外形经过安装调试环节成为完整的机器人,最后完善整个样机 使其在螺旋管道内能顺利工作,帮助人们顺利解决难题。 2机械结构 一、当前状况 目前国内外已研制出的管道机器人类型很多,从机械结构来区分主要有以下 几种移动方式: (1)活塞移动式,其原理类似于活塞在汽缸内的运动,即把管道看作汽缸, 把具有一定弹性和硬度的机器人看作活塞。在结构上,机器人其后面的流体压力 大于前面的压力时,在压差的作用下,机器人克服了管壁与活塞之间的摩擦阻力 而向前运动。机器人可以携带各种传感器,一边行走一边用于管道检测。 图4整体设计流程图 (2)滚轮移动式,利用滚轮驱动式的行走结构,以电机作原动机,为了增 加牵引力,一般采用多轮驱动式,由于
管道机器人弯管通过性的分析 管道机器人弯管通过性的分析
格式:pdf
大小:484KB
页数:3P
4.6
讨论了管道机器人的数学模型,并且对垂直弯管和分支管道的通过性做了分析。通过建立机器人的几何方程,使得机器人可能通过各种弯管。其结果可对机器人的动静态特性研究提供一定的参考。
单向伸缩式管道机器人系统的建模与仿真热门文档
基于火炮身管测量的管道机器人 基于火炮身管测量的管道机器人
格式:pdf
大小:642KB
页数:4P
4.4
针对带膛线身管这一特殊的测量对象,研制了一种能自动测量火炮膛线的新型管道机器人.分析了该机器人的机构组成及工作原理,研究了其运动学和力学特性.实验证明,该机器人测量精度达到0.002mm,多次测量的重复性误差小于0.002mm,并且可靠性高.
基于遗传算法的轮式管道机器人的参数优化 基于遗传算法的轮式管道机器人的参数优化
格式:pdf
大小:1.4MB
页数:4P
4.8
研究了一种轮式全驱动管道机器人质量的优化问题,提出一种基于遗传算法的质量选择的优化模型,分析了轮式管道机器人在满足拖动能力、行进速度等性能指标的要求下,通过轮径、轮距、转矩、转速等参数的改变,能够使机器人的质量得到一个较小、较优的数值,实现机器人的整机轻巧,使用方便,降低制造成本。采用遗传算法,通过c++编制仿真程序,仿真结果证明了该算法是有效的、稳定的。通过机械系统动力学仿真分析软件adams进行拖动力仿真试验,证明了该优化方法的正确性。
管道机器人移动牵引机构设计 管道机器人移动牵引机构设计
格式:pdf
大小:218KB
页数:3P
4.8
管道机器人是特种机器人研究领域中的热点.该文设计了管道机器人蠕动式移动牵引机构,采用电机驱动丝杠正反转,丝杠上丝杠螺母前移,前后两组支撑腿臂交替支撑住管壁,从而实现了机器人的蠕动式前行的驱动方案,并设计了该系统的电控部分.模拟管道中的实验验证了该方案的可行性.
支承轮式管道机器人变径机构动力学分析 支承轮式管道机器人变径机构动力学分析
格式:pdf
大小:207KB
页数:4P
4.5
介绍了4种支承轮式管道机器人变径方案的工作原理,比较分析得出丝杠螺母副变径机构具有更高的驱动效率。在此基础上,基于虚功原理分析了丝杠螺母—支承杆变径机构的驱动特性,并应用多体动力学仿真软件adams对其进行了动力学仿真验证,结果显示丝杠螺母—支承杆变径机构具有更高的驱动效率和更强的管径适应能力,并给出了其驱动电动机随管径变化的一般动力学特性,为支承轮式管道机器人推广应用奠定了基础。
单向伸缩式管道机器人系统的建模与仿真精华文档
管道机器人在弯道处通过性的研究 管道机器人在弯道处通过性的研究
格式:pdf
大小:462KB
页数:6P
4.6
提出了一种描述管道机器人弯道通过性的数学模型,该模型由一组组合约束构成.通过对约束方程的分析讨论,得出了规律性的结论.管道机器人在弯道处的姿态、单元体的几何尺寸、行走轮结构形式对其通过性都有不同程度的影响.所提出数学模型是管道机器人弯道自主行走控制策略设计和相应结构设计的理论基础.

电缆管道机器人视频监测系统的开发
格式:pdf
大小:4.5MB
页数:97P
4.7
上海交通大学 硕士学位论文 电缆管道机器人视频监测系统的开发 姓名:戚伟 申请学位级别:硕士 专业:电力电子与电力传动 指导教师:黄成军;江秀臣 20080101 上海交通大学硕士学位论文 -i- 电缆管道机器人视频监测系统的开发 摘要 随着城市电网的大规模建设,电力电缆采用自动化敷设方法,可以 避免人工敷设带来的效率低下、操作不便等诸多问题,改善电缆敷设质 量,延长电缆使用寿命,保证客户可靠用电。 本文介绍了一种新型可靠的电缆管道机器人系统,通过前端的摄像 监测装置实时监视管道前方及管壁的图像,不仅能在机器人穿越管道的 同时,完成敷设电缆的要求;而且能够对管道中的土建残渣进行清扫, 有效地促进电缆排管土建质量及电缆施工中的敷设质量,为电缆敷设提 供了有效的辅助手段。通过该仪器的使用,能够降低电缆损伤事故、延 长电缆使用寿命,具有广泛的社会及经济效益。 本文涉及的电缆管道机器人系
一种伸缩式油井管道机器人超高压动密封设计 一种伸缩式油井管道机器人超高压动密封设计
格式:pdf
大小:783KB
页数:3P
4.4
以自行研制的一种用于水平井检测的伸缩式油井管道机器人为对象,研究了其在充满高温(约150℃)高压(约60mpa)腐蚀性污油的管道内工作时的动密封问题,采用高耐压高性能的车氏超高压组合密封方案,对机器人关键部件的密封结构进行了设计。初步的实践证明该设计能够达到很好的密封效果,解决了伸缩式油井管道机器人在水平井工作时的超高压动密封问题。
管道机器人视频采集及监控系统设计 管道机器人视频采集及监控系统设计
格式:pdf
大小:293KB
页数:4P
4.7
针对管道机器人的工作特点,提出了一种管道机器人视频监控系统。系统采用光纤传输视频和数据的复合信号,利用视频光端机进行信号的复合和分离,基于directshow框架开发视频采集系统,通过modbus协议完成主机与管道机器人的数据通信,从而实现了管道内部视频图像的实时采集和管道机器人的实时监控。

一种新型中央空调管道机器人的设计
格式:pdf
大小:242KB
页数:3P
4.3
论文根据集中空调管道清扫的特点,设计了一种新型的空调管道机器人,并以自行研发的集中空调管道机器人样机为例,介绍了其传动机构、运动机构的设计,系统功能的实现以及由些引出来上位机与下位机的通信方式的问题。设计中采用三轮三角形布置的轮式移动载体,选用rs-485作为通信电气标准,实现51单片机控制端与pc机的通信。在操作员的远距离遥控操作下,空调管道机器人在管道内部自动行走,并携有操作机构和辅助设备(ccd摄像机、管道清洁扫等),进行一系列管道清扫作业。
单向伸缩式管道机器人系统的建模与仿真最新文档
管道机器人智能电缆绞盘恒张力控制的研究 管道机器人智能电缆绞盘恒张力控制的研究
格式:pdf
大小:1.6MB
页数:5P
4.8
针对管道机器人在后退过程中需要借助人手动来收线的问题,提出了一种智能化的电缆绞盘系统,它是通过管道机器人爬行器和绞盘间电缆的恒张力控制来实现的。由此建立了基于模糊控制的恒张力模型,并利用matlab软件对张力控制系统进行了仿真研究,结果表明该方法是可行的,基于模糊控制的恒张力系统在机器人系统中具有很好的应有价值。
面向矩形管道的管道机器人自适应调节机构的研究 面向矩形管道的管道机器人自适应调节机构的研究
格式:pdf
大小:563KB
页数:4P
4.6
根据管道机器人管内适应性的要求,提出一种面向矩形管道的新型自适应调节机构的设计方案。分析该机构的工作原理、力学特性,建立其数学模型并进行仿真分析。仿真结果表明:该机构提高了管内机器人对矩形管道的适应性,并改善了牵引能力,为机构参数的合理选取提供了科学依据。
三轴差动式管道机器人驱动单元弯管通过性研究 三轴差动式管道机器人驱动单元弯管通过性研究
格式:pdf
大小:1.3MB
页数:5P
4.3
为了描述三轴差动式管道机器人驱动单元的弯管通过性,建立了驱动单元在弯管处的运动方程与平衡方程,分析了其在弯管处的差速特性与力学特性。理论分析表明,三轴差动式管道机器人驱动单元在弯管处自主差速,无寄生功率产生,驱动轮能够提供足够的拖动力,具有良好的机械自适应特性。建立的驱动单元运动方程与平衡方程为三轴差动式管道机器人的机械自适应理论奠定了基础。
一种内螺旋管道机器人 一种内螺旋管道机器人
格式:pdf
大小:265KB
页数:6P
4.5
提出了一种内螺旋管道机器人(简称内螺旋机器人)。设计了该机器人的结构,建立了机器人的动力学方程,数值计算了机器人在管道内运行时管道内壁所受的压力、机器人的轴向推进力和液体对机器人的周向阻力矩。结果表明,当驱动为外磁场驱动时,内螺旋机器人轴向推进力和周向阻力矩都会增大,但对管道壁的损伤也会增大。以机器人轴向推进力和能效指标为优化目标,采用正交优化方法得到一组最优的内螺旋槽几何参数。根据内螺旋机器人的工作原理,设计制造了内螺旋驱动样机,该样机在充满201甲基硅油管道中的运行实验证明了内螺旋机器人的可行性。提出的内螺旋机器人表面光滑,能悬浮运行,对管壁的损伤小,可用于人体内腔的微细管道中。
蠕动式排水管道机器人研制 蠕动式排水管道机器人研制
格式:pdf
大小:293KB
页数:4P
4.4
简要综述了国内外排水管道清淤作业机器人的结构方案,分析了各自特点和局限性。提出了一种基于组合机构的新型蠕动式排水管道机器人。给出了机器人主要结构组成,以及行走机理分析,建立了其行走运动模型和驱动力矩分析模型,给出了主要影响参数以及数值分析。最后,建立了机器人的虚拟样机,完成了其虚拟样机仿真分析。综合理论数值分析和虚拟样机仿真分析验证了方案的可行性和设计理论及分析结论是正确的。该方案的排水管道清淤作业机器人具有大拖动力、作业距离长的特点。
基于电源线载波的有缆管道机器人通信系统 基于电源线载波的有缆管道机器人通信系统
格式:pdf
大小:446KB
页数:未知
4.3
当有缆管道机器人的线缆长度增加时,其重量大增,与管壁的摩擦力会变得很大,严重影响了机器人作业时的最大行走距离及可靠性。为了克服该缺点,本文采用kq-100e电源线载波调制解调模块,给出了载波电路图,制定了通信协议,描述了通信流程,从而实现了线缆内电源线与信号线的复用。该研究成果已应用于中央空调风管清洁机器人中。应用结果表明,该通信系统大大减轻了线缆与管壁的摩擦力,提高了管道机器人的可靠性,增大了其作业时的最大行走距离。

Φ700mm-Φ1000mm管道机器人设计-伸缩机构和机身设计
格式:pdf
大小:1.4MB
页数:33P
4.4
毕业设计(论文) φ700mm-φ1000mm管道机器人设计— 伸缩机构和机身设计 所在学院 专业 班级 姓名 学号 指导老师 年月日 φ700mm-φ1000mm管道机器人设计——伸缩机构和机身设计 ii 摘要 随着机器人技术的飞速发展,工业机器人的应用领域正在不断的扩大,对应用需求 提出了新的要求,为提高机器人应用的水平,我们研制了一套以管道清灰为目的的机器 人系统。 本文阐述了机器人的发展历程,国内外的应用现状,及其巨大的优越性,提出具体 的机器人设计要求,进行了本演示系统的总体方案设计和各自由度具体结构设计、计算; 最后设计伸缩机构和机身设计。 关键字:管道机器人、结构设计、清灰、机械结构 φ700mm-φ1000mm管道机器人设计——伸缩机构和机身设计 iii abstract withtherapiddevelopment
康威电缆隧道智能巡检机器人系统介绍
格式:pdf
大小:1.4MB
页数:3P
4.7
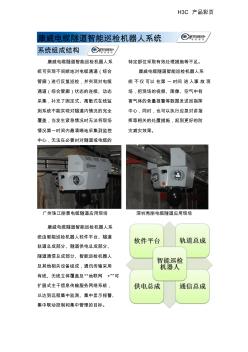
h3c产品彩页 康威电缆隧道智能巡检机器人系 统可实现不间断地对电缆通道(综合 管廊)进行反复巡检,并实现对电缆 通道(综合管廊)状态的连续、动态 采集,补充了固定式、离散式在线监 测系统不能实现对隧道内情况的完全 覆盖,当发生紧急情况时无法将现场 情况第一时间内最清晰地采集到监控 中心,无法在必要时对隧道或电缆的 特定部位采取有效处理措施等不足。 康威电缆隧道智能巡检机器人系 统不仅可以在第一时间进入事故现 场,把现场的视频、图像、空气中有 害气体的含量报警等数据发送回指挥 中心,同时,也可以执行应急对讲指 挥等相关的处置措施,起到更好的防 灾减灾效果。 广州珠江丽景电缆隧道应用现场深圳秀丽电缆隧道应用现场 康威电缆隧道智能巡检机器人系 统由智能巡检机器人软件平台、隧道 轨道总成部分、隧道供电总成部分、 隧道通信总成部分、智能巡检机器人 及其他相关设备组成,通讯传输采用 有线
单向伸缩式管道机器人系统的建模与仿真相关
文辑推荐
知识推荐
百科推荐


职位:港口与航道工程
擅长专业:土建 安装 装饰 市政 园林


