




 蠕动式污水管道清淤机器人
蠕动式污水管道清淤机器人 蠕动式污水管道清淤机器人
采用模块化方法对污水管道清淤机器人中的管道清理单元、推进舱、阀组和控制单元等模块加以组合,并对其进行了总体方案设计,给出了机器人蠕动行走液压油路方案,分析了其蠕动行走过程。介绍了系统上、下位机联合控制方案,同时描述了下位机在控制系统中的功能及其对应程序流程。在此基础上,研制了一台污水管道清淤机器人,并对其进行了实验。结果表明:该机器人在现有方案下能够实现预定的设计目标,管道清理检测质量良好,可降低工人工作强度。
城市排水管道缆控清淤机器人的研究 城市排水管道缆控清淤机器人的研究
介绍了一种用于排水管道清淤的机器人机构及工作原理,该机器人采用周向120°等间距布置的三副齿轮齿条结构,由三台电机分别控制,并且以at89s51单片机为控制核心,通过压力传感器mcl-l测量轮子对管壁的压力值与设定值进行比较来实现控制适径机构的伸缩,增强了系统的鲁棒性和适应性;通过光电传感器来检测机器人是否到达检查井口来实现机器人的自主性行为;用超声波传感器实现绞刀机构的径向移动,以满足不同管径清淤的需要。方案论证表明:该系统具有结构紧凑、适应性强、牵引力大、去淤彻底等特点。
编辑推荐下载
基于模糊控制的排水管道自主清淤机器人 基于模糊控制的排水管道自主清淤机器人
格式:pdf
大小:320KB
页数:未知
 4.5
4.5
为了替代人工完成地下排水管道清淤工作,提出一种可以在电动机的驱动下沿着排水管道自主行走,同时对伸入管内的树枝或油污沉积形成的钙化物进行自动清理的新型机器人。利用光电编码器、倾角传感器和超声波传感器实时检测机器人工作状态和作业环境的变化,并通过引入模糊控制算法,实现驱动步进电动机过载调整、机器人姿态调节以及基于载荷变化的速度调节,从而极大地提升了机器人的自主作业能力,为获得更好的清淤效果奠定了理论基础。
牵引式排水管道清淤机器人的研究 牵引式排水管道清淤机器人的研究
格式:pdf
大小:268KB
页数:4P
4.3
研究了一种新型排水管道清淤机器人,对其组成及工作原理做了论述,以及对基于plc的软、硬件控制做了详细介绍。用钢丝绳牵引装置带动清淤车体连同清淤斗完成有载清淤作业,保证清淤作业有足够的牵引力。通过清淤机器人本体自带动力源带动清淤斗在管道内部空载运动,代替了传统清淤机器人沉重的有缆作业。通过监控系统适时监控管道内部清淤作业状况,采用无线通讯方式传输数据,根据作业要求完成对清淤动作的控制。
城市地下管道、河道、箱涵、水下自动清淤机器人热门文档
浅谈城市地下管道非开挖翻衬法管道内衬修复 浅谈城市地下管道非开挖翻衬法管道内衬修复
格式:pdf
大小:1.4MB
页数:2P
4.5
城市地下管线错综复杂,城市道路的负荷越来越严重,使得排水管线在修复的过程中存在大量的技术问题,尤其是在大都城市,城市道路的开挖越来越受限制。非开挖修复的方法整体优势在于修复的负面影响小,修复所占用场地比较少,对地面、交通、环境以及周围地下管线等等的影响很微弱。因此推广非开挖修复技术在给水排水管道修复领域的运用势在必行。
无缆式城市排水管道清淤机器人的通讯设计 无缆式城市排水管道清淤机器人的通讯设计
格式:pdf
大小:568KB
页数:3P
4.7
根据无缆式排水管道清淤机器人的控制要求,其控制系统采用了3个s7-200plc,机器人内部的两个plc之间利用ppi协议实现通讯,而地面plc与机器人内部plc之间则通过无线通讯完成数据传递。实践证明,该设计策略很好地解决了管道清淤机器人与地面操作人员之间的信息交互问题。
 城市地下管道非开挖施工技术
城市地下管道非开挖施工技术 城市地下管道非开挖施工技术
格式:ppt
大小:5.0MB
页数:未知
3
城市地下管道非开挖施工技术——对非开挖施工技术进行讲解,包括新管铺设、旧管更换、旧管修复及现场勘察、管线探测等相关技术。从非开挖技术特点、使用条件、工艺原理等方面进行详细讲解。 【新管铺设非开挖技术】 水平定向(导向)钻进法、小口径顶管...
2.2城市地下管道修复技术与工程实例
格式:pdf
大小:17KB
页数:11P
4.6
2.2城市地下管道修复技术与工程实例 2.2.1管道修复技术发展 1.管道修复技术 随着城市建设的发展,城市地下管道运行维护越来越受到人 们的关注。城市地下管道中给水排水、燃气、供热等市政公用管 道系统随着使用年限增多,管道使用功能因城市发展不能满足实 际需要。同时,受土层电化学等腐蚀作用,结构损坏或老化程度 不断加大。管道结构和强度安全度不能满足运行要求。开槽敷设 新管道会影响地面交通、破坏环境及扰民,而且在地下管道纵横 交错的城区内大范围采用明挖换管法进行管线的改造和管道更 新已不现实,迫切需要采用新工艺修复或更换这些在役管道的施 工技术。 城市工程施工时,由于地下管道的具体位置和状况等因素不 是充分确定,常会被施工破坏。破坏的结果是引起管道运行中断, 给社会公众造成经济损失和环境污染。管道的修复和更换不仅费 用巨大,同时还会带来环境及社会问题。 为了保证城市地下


城市地下管道、河道、箱涵、水下自动清淤机器人最新文档
内作业机器人管道检测实验系统研究
格式:pdf
大小:29.8MB
页数:99P
4.4
놱뺩릤튵듳톧쮶쪿톧캻싛컄믹폚ccd뗄맜쓚ퟷ튵믺웷죋맜뗀볬닢쪵퇩쾵춳퇐뺿탕쏻ꎺ훜쇺짪쟫톧캻벶뇰ꎺ쮶쪿튵ꎺ닢쫔볆솿벼쫵벰틇웷횸떼뷌쪦ꎺ뫎듦뢻20070501 믹폚ccd뗄맜쓚ퟷ튵믺웷죋맜뗀볬닢쪵퇩쾵춳퇐뺿ퟷ헟ꎺ훜쇺톧캻쫚폨떥캻ꎺ놱뺩릤튵듳톧쿠쯆컄쿗(1쳵ì1.톧캻싛컄헅탱쏷뇤뺶췤맜쓚죤뚯쪽럂짺믺웷죋벰쫓뻵볬닢벼쫵퇐뺿2005릤튵훐닉폃쇋듳솿평틬훖룖몸뷓뷸탐솪뷡뗄맜뗀ꎬ헢샠맜뗀퓚뎤웚럾틛맽돌훐ꎬ틲룷훖췢뷧틲쯘뗄ퟷ폃ꎬ퓚틬훖룖몸뷓뷓춷늿캻뿉쓜돶쿖좱쿝ꎬ캪럀횹킹슩뗈쫂맊뗄랢짺ꎬ뇘탫뛔맜뗀뷸탐폐킧뗄볬닢캬뮤ꆣ떫쫇ꎬ쳘쫢릤튵훐뗄튻킩맜뗀웤뷡릹럇뎣뢴퓓ꎬ늻뷶맜뺶뇤뮯뛸쟒냼몬쟺싊냫뺶뷏킡뗄췤쟺뷡릹ꎬ쫜맜뗀쓚늿뿕볤벰뷡릹뗄쿞훆ꎬ컞램닉폃죋릤쫖뛎뷸탐볬닢ꎬ뛸뎣맦뗄맜뗀믺웷죋뫜쓑뷢뻶퓚헢훖뢴퓓맜뗀쓚뗄춨맽탔컊쳢ꎻ
10论文正文管道履带式机器人
格式:pdf
大小:3.7MB
页数:48P
4.7
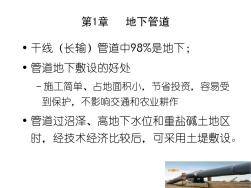
青岛科技大学本科毕业设计(论文) 1 前言 油气管道输送是与铁路、公路、水运、航运并列的五大运输行业之一,长 输油气管道作为一种特殊设备广泛应用于石油、石化、化工等工业领域以及城 市燃气系统中,在国民经济中占有重要地位。随着“开发大西部”以及“西气 东输”的战略指导方针,长输油气管道的数量在不断增加。由于历史原因,国 内在役长输油气管道中部分管材制管质量较差,加上施工建设过程中存在部分 焊接缺陷和涂层缺陷,这给管道的安全运行埋下隐患,即使部分投产验收合格 的管道,在运行过程中也难免受到介质、温度、疲劳、腐蚀、局部载荷等因素 影响,服役一段时间后产生缺陷或导致缺陷扩展,并可能最终发生失效,给人 民生命财产、工业生产和社会稳定构成威胁。如何检测发现管道缺陷,事前对 含缺陷管道进行评价和预测(含缺陷管道的剩余强度评价,含缺陷管道的剩余寿 命预测),确保在役油气长输管道安全可靠运行是目前世界
一种新型排水管道清淤机器人控制系统的设计 一种新型排水管道清淤机器人控制系统的设计
格式:pdf
大小:2.6MB
页数:4P
4.8
介绍了一种用于排水管道清淤和检测的机器人机构及工作原理,该机器人采用了履带式行走机构和管道直径调节机构,以st89c58单片机为控制核心,通过压力传感器的反馈值,自主地控制管道直径调节机构。同时对驱动电动机控制、速度传感器以及光电编码器在机器人中的应用进行了详细介绍。经论证表明:该系统具有结构紧凑、适应性强、牵引力大、去淤彻底等特点。
基于AT89C51控制的排水管道清淤机器人的设计 基于AT89C51控制的排水管道清淤机器人的设计
格式:pdf
大小:186KB
页数:3P
4.5
研究了一种新型适应管径的排水管道清淤机器人,基于at89c51单片机,通过压力传感器mcl-l测量轮子对管壁的压力值与设定值进行比较,实现机器人的鲁棒性和适应性;通过光电传感器gk-430a检测机器人是否到达检查井口,实现机器人的自主性和智能性;用超声波传感器实现绞刀机构的径向移动,以满足不同管径清淤的需要。方案论证表明:该系统适应性强、工作效率高、去淤彻底。
 管道机器人弯管通过性的分析
管道机器人弯管通过性的分析 管道机器人弯管通过性的分析
格式:pdf
大小:484KB
页数:3P
4.6
讨论了管道机器人的数学模型,并且对垂直弯管和分支管道的通过性做了分析。通过建立机器人的几何方程,使得机器人可能通过各种弯管。其结果可对机器人的动静态特性研究提供一定的参考。
基于火炮身管测量的管道机器人 基于火炮身管测量的管道机器人
格式:pdf
大小:642KB
页数:4P
4.4
针对带膛线身管这一特殊的测量对象,研制了一种能自动测量火炮膛线的新型管道机器人.分析了该机器人的机构组成及工作原理,研究了其运动学和力学特性.实验证明,该机器人测量精度达到0.002mm,多次测量的重复性误差小于0.002mm,并且可靠性高.
可变径管道机器人系统的设计与研究
格式:pdf
大小:422KB
页数:4P
4.4
第41卷2013年第4期 本 栏 目 编 辑 陆 秋 云 通 用 124 可变径管道机器人系统的 设计与研究 武 燕1,王才东2,王新杰2,牛志军2 1 河南机电职业学院机械工程系 河南郑州 451191 2 郑州轻工业学院机电工程学院 河南郑州 450002 摘要:笔者在分析管道机器人国内外发展现状基础上,针对管道机器人对不同管径需求,提出了一种 双履带式可变径管道机器人的总体方案。设计了机器人的驱动装置、直径调节机构等关键部件,并设 计了机器人的控制系统,该控制系统上采用了上、下位机控制结构,通过手动和自动2种控制模式, 实现机器人无级调速、前进、后退、转弯和图像信息采集等功能。研究结果为可变径管道机器人的实 用化开发奠定了基础。 关键词:管道机器人;变管径;穿缆;控制系统 中图分类号:tp242 文献标志码:a 文章编号:1001-3954
可变径煤矿管道检测机器人的设计 可变径煤矿管道检测机器人的设计
格式:pdf
大小:1.4MB
页数:4P
4.7
在煤矿生产中使用大量的管道,其质量关系到整个煤矿的安全和高效生产。为提高管道寿命,预防管道老化、腐蚀及断裂等问题,并实现高效准确地故障诊断,笔者设计了一种可变径管道检测机器人,并建立了机器人三维模型,利用adams对其进行运动仿真,从而验证了机器人在直径为220~300mm的管道中自由行走和检测的可行性。
城市地下管道、河道、箱涵、水下自动清淤机器人相关
文辑推荐
知识推荐
百科推荐


职位:村庄规划设计师
擅长专业:土建 安装 装饰 市政 园林


