

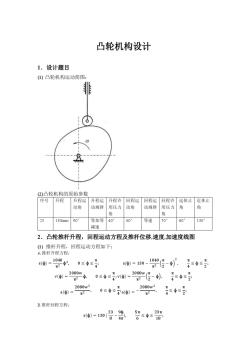
北航机械原理--钢板翻转机构--运动简图设计
格式:pdf
大小:192KB
页数:6P
人气 :67
 4.6
4.6
钢板翻转机构运动简图 钢板运送到左板,左板水平 图五 两板同时偏转到垂直偏右 10° 图六 实现钢板 180°翻转,右板水平 图七 如图五、图六所示,分别是两套曲柄摇杆机构的极限位置。当曲柄以 5r/min 速 度顺时针旋转了 180°时,两摇杆恰好同时到达极限位置,使交接钢板的重合位 置位于垂直方向向右偏 10°的位置,再转 180°同时回到初始位置, 且曲柄的转 动是匀速的,从而实现同时进程,同时回程,往复循环。 设计计算 左夹板曲柄摇杆机构的尺寸 设曲柄长度 1a 、连杆长度 1b (在图中体现为 QA,TB 长度)、摇杆长度 1c 。 1O A、 1O B为摇杆的两极限位置, 1O C为 1AO B D 的角平分线 。根据题意, 1AO C =49° 1BO C =49°。过 P作 1O C的垂线,分别交过曲柄轴线的水平线于点 A、C、B。 设计尺寸: O1C,O2M 450mm




编辑推荐下载

机械原理课程设计包装机推包机构运动简图与传动系统设计
格式:pdf
大小:640KB
页数:13P
4.6
-1- 西北工业大学 机械原理课程设计说明书 --包装机推包机构运动简图与传动系统设计 指导老师: 班级: 学生姓名: 学号: 组员: 目录 -2- 一、设计题目和要求··············································3 二、设计方案的选定··············································3 三、机构的尺寸设计··············································8 1、曲柄滑块结构的尺寸计算···································8 2、凸轮尺寸设计·············································9 四、电动机的选择及传动方案的设计············
北航机械原理钢板翻转机构运动简图设计热门文档
钢板翻转机
格式:pdf
大小:522KB
页数:11P
4.6
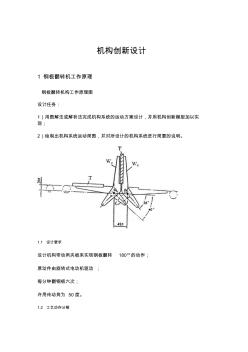
机构创新设计 1钢板翻转机工作原理 钢板翻转机构工作原理图 设计任务: 1)用图解法或解析法完成机构系统的运动方案设计,并用机构创新模型加以实 现; 2)绘制出机构系统运动简图,并对所设计的机构系统进行简要的说明。 1.1设计要求 设计机构带动两夹板来实现钢板翻转180°的动作; 原动件由旋转式电动机驱动; 每分钟翻钢板六次; 许用传动角为50度。 1.2工艺动作分解 设计机具实现将钢板反转180度。钢板翻转机工作过程,当钢板t由传送带送至 左翻板w1后,w1开始顺时针方向转动。转至铅垂位置偏左10度左右时,与逆 时针方向转动的右翻板w2会和。接着,w1与w2一同转至铅垂位置偏右10度左 右,w1折回到水平位置,与此同时,w2顺时针方向转动到水平位置,从而完成 钢板翻转任务。 2传动装置设计 2.1执行构件的运动参数 构件运动形式运动参数 左夹板往
 基于翻转课堂的《机械原理》课程教学设计与实践探索
基于翻转课堂的《机械原理》课程教学设计与实践探索 基于翻转课堂的《机械原理》课程教学设计与实践探索
格式:pdf
大小:2.9MB
页数:2P
4.4
信息技术的迅速发展,促进了教学模式的改革,也为翻转课堂的顺利实施提供了快速发展的机会。本文主要综述了在翻转课堂的教学模式下,对于机械原理的课程的教学设计和相关的实践探索,以克服传统教学的弊端,全面提高机械原理课程的教学质量。
机械原理课程设计摇摆送料机构
格式:pdf
大小:463KB
页数:14P
4.3
机械原理课程设计说明书 题目:摆式送料机构总体设计 姓名:冯帅 学号: 专业: 班级: 学院:交通与车辆工程学院 指导教师: 2013年7月9日 机械原理课程设计摆式送料机构总体设计 1 目录 第一章机械原理课程设计指导书.....................................................2 一.机械原理课程设计的目的...........................................................2 二.机械原理课程设计的任务...........................................................2 三.课程设计步骤..........................................

基于“翻转课堂”的机械原理课程教学改革
格式:pdf
大小:220KB
页数:1P
4.4
针对机械专业应用型人才培养的要求,从机械原理这一门核心专业基础课程在传统教学中面临课时少内容繁杂,实践匮乏等问题出发,将翻转课堂和机械原理课程结合起来,进行基于“翻转课堂”的机械原理课程教学改革,实现三维教学目标(知识与技能、过程与方法和情感态度价值观),为社会培养应用型人才。
北航机械原理钢板翻转机构运动简图设计精华文档
凸轮机构大作业机械原理课设
格式:pdf
大小:155KB
页数:10P
4.7
大作业(二) 凸轮机构设计 (题号:7-abc) 班级______________________ 学号______________________ 姓名______________________ 成绩______________________ 同组者______________________ 完成日期2010年12月日 1 目录 凸轮机构设计...................................................................................................................................3 1.题目及原始数据............................................................
机械手回转机构伸缩机构毕业设计
格式:pdf
大小:261KB
页数:31P
4.8
学号:0808470503 毕业设计题目数控卧式镗铣床自动换刀机械手手架伸缩、回转结构与手 架升降结构设计 学院专业班级交通与机械工程学院机械08-6班 学生姓名王恩涛性别男 指导教师王丹职称副教授 1.毕业设计选题论证书共1页 2.毕业设计任务书共4页 3.毕业设计开题报告共1页 4.毕业设计进度检查表共1页 5.毕业设计指导教师评定意见共1页 6.毕业设计评阅人评阅意见共1页 7.毕业设计答辩记录及成绩共1页 8.毕业设计答辩委员会评审意见共1页 沈阳建筑大学 毕业设计选题论证书 毕业设计题目 数控卧式镗铣床自动换刀机械手手架伸缩、回转结构与手架 升降结构设计 指导教师姓名王丹职称副教授 是否新题否是否首次指导毕业设计 否 选题依据
机械原理课程设计牛头刨床导杆机构
格式:pdf
大小:130KB
页数:18P
4.6
牛头刨床导杆机构的运动分析 目录 1设计任务及要求,,,,,,,,,,, 2数学模型的建立,,,,,,,,,,, 3程序框图,,,,,,,,,,,,,, 4程序清单及运行结果,,,,,,,,, 5设计总结,,,,,,,,,,,,,, 6参考文献,,,,,,,,,,,,,, 机械原理课程设计任务书(一) 姓名郭娜专业机械工程及自动化班级机械08-3班学号0807100305 一、设计题目:牛头刨床导杆机构的运动分析 二、系统简图: 棘轮 工作台 电动机 a b c d feo o 4 56 7 11 3 8o' o"o2 1 4 o91 9 10 工件 z' z" z1z21 2 n2 3 456 7 8 9 1011 12 8' 1' 1 27' c b a 1 2 3 4 56 h/ 2 n 2 三、工作条件 已知:曲柄每

06北航机械考研971机械原理期末试题试题
格式:pdf
大小:113KB
页数:8P
4.6
北京航空航天大学 2005—2006学年第二学期期末 《机械原理》 考试a卷 班级___________学号___________ 姓名___________成绩___________ 2006年6月28日 班级__________学号__________姓名__________成绩__________ 《机械原理》期末考试卷 注意事项:1、请将解答写在试卷上; 2、草稿纸上的解答不作为批改试卷的依据; 3、图解法解答请保留作图过程和作图辅助线。 题目: 一.连杆机构.⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(16分) 二.机构的自由度计算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(17分) 三.齿轮机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(17分) 四.凸轮机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(17分) 五.机械系统动力学⋯
北航机械原理钢板翻转机构运动简图设计最新文档

机械原理螺旋机构设计
格式:pdf
大小:164KB
页数:4P
4.6
机械原理大作业 班级:矿电12-1 姓名:凌砚辉 学号:11 螺旋机构 1.螺旋机构的组成及特点 (1)螺旋机构的组成 螺旋机构由螺杆、螺母和机架组成。通常它是将旋转运动 转换为直线运动。但当导程角大于当量摩擦角时,它还可以将 直线运动转换为旋转运动。 (2)螺旋机构的特点 主要优点:能获得很多的减速比和刀的增益;选择合适的螺旋机 构导程角,可获得机构的自锁性。 主要缺点:效率较低,特别是具有自锁性的螺旋机构效率低于 50%。 因此,螺旋机构常用于起重机、压力机以及功率不大的进给系统 和微调装置中。 2.螺旋机构的运动分析 当螺杆转过φ时,螺母沿其轴向移动的距离为 s=lφ/(2π) 其中l为螺旋的导程。 (1)微动螺旋机构 设螺旋机构中a、b段的螺旋导程分别为la、lb,且两端螺旋 的旋向相同(即同为左旋或右旋),则当螺杆1
基于正弦规原理的工作台自动翻转机构设计 基于正弦规原理的工作台自动翻转机构设计
格式:pdf
大小:115KB
页数:未知
4.3
介绍了一种基于正弦规原理的工作台自动翻转机构。新型机构提高了翻转工作台翻转角度的精度,且无需电机驱动,节省能源。

凸轮机构大作业西工大机械原理
格式:pdf
大小:325KB
页数:16P
4.4
1 大作业(二) 凸轮机构设计 (题号:4-a) (一)题目及原始数据··············· (二)推杆运动规律及凸轮廓线方程········· (三)程序框图········· (四)计算程序················· 2 (五)程序计算结果及分析············· (六)凸轮机构图················· (七)心得体会·················· (八)参考书··················· 一题目及原始数据 试用计算机辅助设计完成偏置直动滚子推杆盘形凸轮机构的设计 (1)推程运动规律为五次多项式运动规律,回程运动规律为余弦加速度运动规 律; (2)打印出原始数据; (3)打印出理论轮廓和实际轮廓的坐标值; (4)打印出推程和回程的最大压力角,以及出现最大压力角时凸轮的相应转角; (5)打印出凸轮实际轮廓曲线的


常用机械传动运动简图
格式:pdf
大小:1.1MB
页数:4P
4.7
常用机械传动运动简图 齿轮传动(含蜗杆传动) 名 称 齿轮构件 圆柱齿轮圆锥齿轮蜗杆蜗轮圆柱齿轮(指明齿线)圆锥齿轮(指明齿线) 直齿斜齿入字齿直齿斜齿弧齿 基 本 符 号 可 用 符 号 名 称 圆柱齿轮传动非圆齿轮传动圆锥齿轮传动准曲面齿轮传动 基 本 符 号 可 用 符 号 名 称 螺旋齿轮传动齿条传动扇形齿轮传动蜗轮与圆柱蜗杆传动蜗轮与球面蜗杆传动 基 本 符 号 可 用 符 号 摩擦传动 名 称 圆柱轮圆锥轮可调圆锥轮可调冕状轮 基 本 符 号 及 可 用 符 号 带传动 名 称 一般符号轴上宝塔轮 不指明类型指明带的类型时 基 本 符 号 链传动 名 称 不指明类型指明链条类型 基 本 符 号 螺杆传动 名 称 整体螺母开合螺母滚珠螺母 基 本 符 号 及 可 用 符 号
机械原理课程设计-旋转型灌装机运动方案设计
格式:pdf
大小:615KB
页数:19P
4.5
机械原理课程设计 旋转型灌装机运动方案设计 2 目录 1设计题目 1.1设计条件 1.2设计要求 2原动机的选择 3传动分配 4传动机构的选择 4.1减速器设计 4.2第二次减速装置设计 4.3第三次减速装置设计 4.4齿轮的设计 5方案拟定笔记 5.1综述 5.21三种方案 5.22比较方案,选择设计 6机械运动循环图 7凸轮设计,计算及校核 8连杆机构设计校核 3 9间歇机构设计 10设计感想 11参考资料 1设计题目 设计旋转型灌装机。在转动工作台上对包装容器(如玻璃瓶)连续灌装流体 (如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装、封口等工序。为保 证在这些工位上能够准确地灌装、封口,应有定位装置。如图1-1中,工位1: 输入空瓶;工位2:灌装;工位3:封口;工位4:输出包装好的容器。 1 23 4 传送带 固定工
旋转型灌装机运动方案设计(机械原理课程设计范本) (3)
格式:pdf
大小:1.1MB
页数:10P
4.5
1 机械原理课程设计 旋转型灌装机运动方案设计 指导教师:庄幼敏 小组成员: 机械0404王小琛040800404 机械0404赵凤满040800405 2007年1月19日 2 目录 1.题目 2.设计题目及任务⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1 2.1设计题目⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1 2.2设计任务⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1 3.运动方案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2 3.1方案一⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2 3.1方案二⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2 3.3方案三⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2 3.4
 带肋钢筋调直机调直回转机构的设计
带肋钢筋调直机调直回转机构的设计 带肋钢筋调直机调直回转机构的设计
格式:pdf
大小:402KB
页数:未知
4.6
本文着重介绍了带肋钢筋调直机回转机构形式以及基本参数的确定,该机构具有结构新颖、调直后钢筋不伤肋等优点。
北航机械原理钢板翻转机构运动简图设计相关
文辑推荐
知识推荐
百科推荐


职位:安全评价师(二级)
擅长专业:土建 安装 装饰 市政 园林


