

基于变电站巡检机器人的超声波检测系统的设计与实现
格式:pdf
大小:546KB
页数:3P
人气 :76
 4.4
4.4
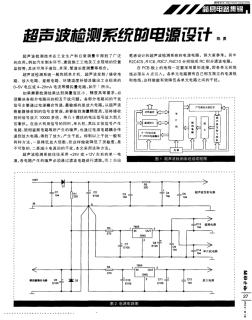
本文研究开发了一种基于变电站巡检机器人的多超声传感器采集系统。系统选用一体化超声传感器,以单片机为控制器,设计了超声波的发射和接收电路,完成了与机器人工控机的通信,并完成了相应的软件程序设计。考虑到变电站的强电磁环境对电子设备的干扰影响,在电路设计上采用大量的滤波电路,提高了系统的抗干扰能力,实现了测量的实时性和准确性。变电站环境应用表明:该系统运行稳定,具有较高的测量精度,对变电站巡检器人在变电站中的应用具有重要意义。



 轨道式变电站巡检机器人投入试运行
轨道式变电站巡检机器人投入试运行 轨道式变电站巡检机器人投入试运行
一台轨道式巡检机器人日前在辽宁鞍山220千伏王铁变电站投入试运行,其代替人工巡视变电站线路,可节省人力,保障人身安全,并且比其他类型巡检机器人更具稳定性和实用性。
变电站智能巡检机器人云台控制系统设计 变电站智能巡检机器人云台控制系统设计
云台是变电站智能巡检机器人中的关键组成部分,针对现有云台产品无法满足现场巡检任务要求这一情况,设计了巡检机器人云台控制系统。首先叙述了整个系统的特点和总体设计方案;进而设计了控制系统的硬件和软件,详细描述了硬件系统各模块的功能特点以及系统软件设计过程中系统功能、控制算法和控制软件三个方面的内容;最后通过实验验证了云台控制系统控制精度良好,云台定位准确,能够满足巡检任务的要求。
编辑推荐下载
 变电站巡检机器人电源监测及控制系统研究
变电站巡检机器人电源监测及控制系统研究 变电站巡检机器人电源监测及控制系统研究
格式:pdf
大小:544KB
页数:未知
4.7
为保证变电站巡检机器人稳定、高效、持续的运行,本文提出一种应用于变电站巡检机器人的电源监测及控制系统,该系统结构紧凑,匹配完善,能满足变电站巡检机器人不同设备对电源的要求,全面监测电池的运行状态,并实现机器人的自动充电。现场工业运行表明,该系统自动化程度较高,交互性好,实用性强,能够满足变电站巡检机器人长期自主运行的功能需求。
变电站巡检机器人的超声波检测系统的设计与实现热门文档
基于变电站状态评价的集配型巡检机器人应用研究 基于变电站状态评价的集配型巡检机器人应用研究
格式:pdf
大小:891KB
页数:4P
4.6
为解决多座变电站共用1台机器人的问题,提出基于变电站状态评价动态设置集配型机器人巡检模式.介绍变电站智能机器人巡检系统的结构、机器人的性能需求,分析变电站状态评价标准、变电站状态巡检、机器人巡检模式.通过实际应用对比证明:基于所研究的方法进行应用不仅保证机器人能完成变电站设备巡检任务,还能减轻变电站运维人员的劳动强度、提高工作效率、提升设备检测水平等.
 南方电网首台自主研发变电站巡检机器人即将量产
南方电网首台自主研发变电站巡检机器人即将量产 南方电网首台自主研发变电站巡检机器人即将量产
格式:pdf
大小:44KB
页数:1P
4.8
近日,广东电网公司电力科学研究院自主研发的变电站巡检机器人通过型式试验,这标志着南方电网首台自主研发的巡检机器人即将量产。广东电网公司将在220千伏变电站全面推广使用巡检机器人。"南网智造"为机器人在电力行业的研究与应用积累了经验、做出了示范,更勾勒出了电力系统人机共融时代的美好图景。"巡检机器人在国内已有近10年的应用实践,但是,技
变电站智能巡检系统的设计与实现 变电站智能巡检系统的设计与实现
格式:pdf
大小:1.5MB
页数:4P
4.3
随着电网技术的不断发展和完善,智能化成为电网技术的发展目标。通过设计一个智能化变电站巡检系统,简化了巡检人员的作业操作任务,使得电力设备巡检更加准确、高效和具有可追溯性。在系统实现中,移动端负责巡检数据的采集、录入和上传,服务端完成数据接收和统计并以可视化展示。该智能巡检系统操作方便快捷,具有较强的实用性。
变电站巡检机器人的超声波检测系统的设计与实现精华文档


超声波检测工艺规程.
格式:pdf
大小:414KB
页数:20P
4.8
1 超声波检测工艺规程 1目的 本规程规定了检测人员的资格、仪器探头试块、检测范围、方法和质量分级等。 2适用范围 2.1本规程采用a型脉冲反射式超声探伤仪器对钢板、锻件和焊缝进行检测。 2.2本规程依据jb4730的要求编写。符合《容规》和gb150的要求。 2.3检测工艺卡是本规程的补充,必要时由ii级人员按合同要求编制,其检测参数规定的 更具体。 3引用标准 jb4730《压力容器无损检测》 gb150《钢制压力容器》 jb4126《超声检测用试块的制造和控制》 zbj04001《a型脉冲反射式超声波探伤系统工作性能测试方法》 zby230《a型脉冲反射式超声波探伤仪通用技术条件》 zby232《超声探伤用1号标准试块技术条件》 zby231《超声探伤用探头性能测试方法》 4通用规则 4.1检测人员 4.1.1检测人员必须经过培训,按《锅炉压力容器无损检测人员资
变电站巡检机器人的超声波检测系统的设计与实现最新文档
变电站轨道机器人自动测温装置 变电站轨道机器人自动测温装置
格式:pdf
大小:120KB
页数:1P
4.4
随着我国经济的快速发展,对供电企业的可靠性要求也日益增强。国家电网公司为了保证设备的安全可靠运行,提出了状态检修。而对运行设备进行在线红外测温,是状态检修的技术保证之一。
超声波检测工艺规程
格式:pdf
大小:103KB
页数:15P
4.6
超声波检测工艺规程 1适用范围 1.1本工艺适用于板厚为6-250mm的板材、碳素钢和低合金钢锻件、母材壁厚 8-400mm的全焊透熔化焊对接焊缝及壁厚大于等于4mm,管径为57-1200mm碳素 钢和低合金石油天然气长输、集输和其他油气管道环向对接焊缝、钢质储罐对接 焊缝的超声波检测等。 1.2本工艺规定了使用a型脉冲反射式超声波探伤仪进行检测过程中,对受检设 备做出准确判定应遵循的一般程序和要求。 1.3引用标准 jb4730/t-2005《承压设备无损检测》 sy/t4109-2005《石油天然气钢质管道无损检测》 gb11345-89《钢焊缝手工超声波探伤方法和探伤结果的分级》 jb/t9214-1999《a型脉冲反射式超声探伤系统测试方法》 jb/t10062-1999《超声探伤用探头性能测试方法》 gb50128-2005《立式圆筒形钢制焊接储罐施工及
变电站带电水冲洗移动机器人控制系统的研究 变电站带电水冲洗移动机器人控制系统的研究
格式:pdf
大小:70KB
页数:未知
4.5
由于变电站设备长期暴露在户外环境中,因而设备的表面会出现工业污秽以及自然污秽的积累。一旦出现污闪问题,将直接威胁到变电站的正常运行。因而,使用带电水冲洗移动机器人进行变电站的冲洗有着重要的意义。本文先对机器人总体设计进行探讨,并进一步研究变电站带电水冲洗移动机器人控制系统的设计。
我国制造的变电站巡检机器人达国际先进水平
格式:pdf
大小:67KB
页数:1P
4.6
近日,山东电力研究院与天津市电力高压供电公司签署了《变电站设备巡检机器人技术协议》和购销合同,变电站设备巡检机器人由此实现了省外市场化销售。
我国制造的变电站巡检机器人达国际先进水平 我国制造的变电站巡检机器人达国际先进水平
格式:pdf
大小:76KB
页数:1P
4.7
关技术人员正确理解和执行。 2.2.1 使用 主要包括监测装置安装前应该做的准备工作、 监测装置的安装位置、监测装置安装必须遵循的程 序及履行的必要手续、监测装置的保障措施和管理 措施、监测装置的操作与运行步骤以及监测装置退 出运行应采取的措施和技术要求等。 2.2.2 监测装置的检验 a.检验周期的确定 根据河北南网多年来的 运行经验和变电站运行的实际情况,考虑了各种监 测装置制造工艺不同的运行条件,规定:电能质量监 测装置2a要离线检验1次;对工作环境恶劣的监 测装置,必要时可每年1检验次;对于高可靠性且投 入运行年限短的,而现场运行环境条件相对较好的 监测装置,可考虑根据设备状况及制造厂的相关规 定适当延长检验周期,延长时间不超过1a。 b.检验指标的确定 目前网内装设的电能质 量监测装置,既有谐波、电压不平衡度、频率、电压波
 基桩检测- 超声波检测
基桩检测- 超声波检测 基桩检测- 超声波检测
格式:ppt
大小:533KB
页数:未知
3
基桩检测-超声波检测——超声检测实质是振动(或波动)检测的一种,它是用一组的声波频率范围的波的输入桩身,并接收透射和反射后的波,进行分辨,判定桩身质量。声波有很多种: 1)次声波段频率f
巡检机器人控制系统整体软件设计 巡检机器人控制系统整体软件设计
格式:pdf
大小:76KB
页数:2P
4.3
在巡检机器人控制系统硬件平台上移植了μc/os-ii嵌入式操作系统;根据该控制系统的实际功能需求,进行了系统主要任务的设计与分配;最后对巡检机器人远程控制平台的显示界面进行了功能性的设计,实现电力隧道巡检机器人远程控制平台与巡检机器人硬件终端的交互功能。
基于UWB和GIS的变电站智能巡检系统的设计与实现 基于UWB和GIS的变电站智能巡检系统的设计与实现
格式:pdf
大小:2.1MB
页数:5P
4.4
室内外定位对于变电站巡检的安全生产和信息化管理具有重要意义.由于受遮挡和电磁波的干扰,采用传统的定位方法会出现定位精度不高等问题.为了解决这些问题,提出了一种利用uwb定位和电力gis相结合的变电站智能巡检系统.该系统首先利用了uwb和gis相结合的方法对巡检人员进行室内外跟踪定位,然后利用restful技术进行app客户端和服务器之间的通信,最后利用web方式对系统进行统一管理.该系统经过实际测试表明,具有功能齐全、定位准确和运行稳定等特点,为国家电网的智能化管理和安全生产提供了重要的解决方案.
基于UWB和GIS的变电站智能巡检系统的设计与实现 基于UWB和GIS的变电站智能巡检系统的设计与实现
格式:pdf
大小:1.8MB
页数:5P
4.3
室内外定位对于变电站巡检的安全生产和信息化管理具有重要意义。由于受遮挡和电磁波的干扰,采用传统的定位方法会出现定位精度不高等问题。为了解决这些问题,提出了一种利用uwb定位和电力gis相结合的变电站智能巡检系统。该系统首先利用了uwb和gis相结合的方法对巡检人员进行室内外跟踪定位,然后利用restful技术进行app客户端和服务器之间的通信,最后利用web方式对系统进行统一管理。该系统经过实际测试表明,具有功能齐全、定位准确和运行稳定等特点,为国家电网的智能化管理和安全生产提供了重要的解决方案。
变电站巡检机器人的超声波检测系统的设计与实现相关
文辑推荐
知识推荐
百科推荐


职位:测量员,测量工程师
擅长专业:土建 安装 装饰 市政 园林


