

基于PLC的气动机械手控制系统设计技术研究
格式:pdf
大小:2.1MB
页数:2P
人气 :73
 4.8
4.8
文章首先对PLC技术和气动机械手的含义进行了介绍,然后运用理论与实际相结合的方式,以气动机械手的结构和PLC控制系统作为切入点,分别针对设计工作的重、难点展开了研究。



 基于PLC的气动机械手控制系统设计技术研究
基于PLC的气动机械手控制系统设计技术研究 基于PLC的气动机械手控制系统设计技术研究
文章首先对plc技术和气动机械手的含义进行了介绍,然后运用理论与实际相结合的方式,以气动机械手的结构和plc控制系统作为切入点,分别针对设计工作的重、难点展开了研究。
气动机械手控制系统设计
机械工程学院气动机械手设计说明书(论文) 气动机械手 课程设计说明书 设计题目:气动机械手结构及控制系统设计 学生姓名: 学号:1204010714 专业班级: 指导教师: 2015年07月23日 机械工程学院气动机械手设计说明书(论文) 目录 摘要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1 第一章气动机械手课题研究的意义、目的⋯⋯⋯⋯⋯⋯⋯⋯⋯1 1.1课题设计的意义⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1 1.2课题设计的目的⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2 第二章总体方案设计..⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2 第三章机械系统的设计与计
编辑推荐下载
基于PLC技术的气动机械手控制系统设计研究 基于PLC技术的气动机械手控制系统设计研究
格式:pdf
大小:3.0MB
页数:2P
4.3
在社会生产进程中,由于气动机械有其优势,在应用过程中会降低制造成本,设备结构相对简单,使用更加的便捷,因此在工业领域得到了广泛的应用。本文将plc技术作为基础,探究了气动机械手控制系统的组成,并分析了相关需求,探究了手动、半自动与全自动操作功能模块的实施手段,最终详细阐述了气动机械手控制系统的设计方案。
气动机械手的PLC控制系统设计 气动机械手的PLC控制系统设计
格式:pdf
大小:200KB
页数:3P
4.6
气动机械手在现代工业生产中应用广泛,介绍了一台plc控制的气动机械手,描述了该机械手的结构,分析了其工作流程,设计了机械手的气动控制系统,编制其plc控制程序。
PLC的气动机械手控制系统设计技术热门文档
基于PLC控制的气动机械手控制系统 基于PLC控制的气动机械手控制系统
格式:pdf
大小:94KB
页数:2P
4.4
论述了基于plc控制的气动机械手装置的结构、功能、原理及软件编程,详细介绍了气动机械手的过程与控制要求、plc与器件的逻辑电路连接以及系统的气动原理与工作原理等具体内容。
基于PLC控制的气动机械手控制系统研究 基于PLC控制的气动机械手控制系统研究
格式:pdf
大小:158KB
页数:未知
4.7
根据自动生成设备中气动机械手的应用情况来看,其具有成本比较低、结构简单、方便控制与操作等多种优点,并且还可以根据自动化设备的具体要求进行工作程序的设定,对于提高自动生成设备的工作效率有着重要影响。本文就气动机械手控制系统的主要组成结构和控制要求进行阐述,对基于plc控制的气动机械手控制系统的设计进行合理分析,以推动基于plc控制的气动机械手控制系统有更广泛的应用。
气动机械手PLC控制系统设计_毕业论文
格式:pdf
大小:276KB
页数:25P
4.4
天津轻工职业技术学院 毕业设计论文 机械手plc控制系统设计 刘磊 指导老师姓名:于玲 专业名称:生产过程自动化 班级:生产1班 学号:10030430132 2013年3月4号 i 【摘要】:在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐 蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。自从机械手 问世以来,相应的各种难题迎刃而解。机械手可在空间抓、放、搬运物体,动作灵活 多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。plc 机械手设计主要是依靠限位开关和电磁阀的控制及推动来实现的。机械手的所有动作 均采用电控制、气压驱动。它的上升/下降、左移/右移和左旋转/右旋转均采用双线 圈双位电磁阀推动气压缸完成。机械手的动作转换依靠限位开关来控制并且按照一定 的顺序动作
(完整版)基于plc的机械手控制系统设计
格式:pdf
大小:1004KB
页数:34P
4.4
青岛科技大学本科毕业设计论文 1 前言 随着我国工业生产的飞跃发展,自动化程度的迅速提高,实现工件的装卸、 转向、输送或操持焊枪、喷枪、扳手等工具进行加工、装配等作业的自动化, 已愈来愈引起人们的重视。 机械手是在机械化、自动化生产过程中发展起来的一种新型装置。近 年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成 为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展, 使得机械手能更好地实现与机械化和自动化的有机结合。 机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动 抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为“工业 机械手”。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳 动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已 受到许多部门的重视,并越来越广泛地得到了应用,生产中应用机
基于PLC控制的气动机械手 基于PLC控制的气动机械手
格式:pdf
大小:324KB
页数:2P
4.7
介绍了一种采用plc控制的气动机械手的结构、动作要求;给出了气动机械手的气动回路及其工作原理,分析了工作流程,进行了plc控制系统的i/o端口分配,设计相应的硬件。机械手的动作顺序和动作速度可根据客户要求而作相应调整,适应于工作环境。
PLC的气动机械手控制系统设计技术精华文档
气动机械手的PLC控制 气动机械手的PLC控制
格式:pdf
大小:80KB
页数:未知
4.7
气动机械手广泛应用于工业生产领域,可以工作在高温,高压,粉尘以及带有放射性和污染性的场合,可以完成一些复杂的任务。文章论述了气动机械的结构功能,设计了基于西门子plc控制气动机械手的工作程序。
PLC在气动机械手控制中的应用 PLC在气动机械手控制中的应用
格式:pdf
大小:100KB
页数:未知
4.5
在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,有时还要经常人工从事这种重复性的劳动,枯燥、无味,还容易使人产生疲劳,出现操作错误。而采用气动机械手进行自动化的操作,直接解决了上述问题。本文选择可编程控制器(plc)作为机械手的控制系统,阐述了机械手控制系统的设计和实现过程。
多功能机械手控制系统设计 多功能机械手控制系统设计
格式:pdf
大小:116KB
页数:1P
4.8
本文设计了基于plc的多功能机械手控制系统,该系统可实现手动/自动工作方式,其中自动工作方式时还可实现回原点、单周期和连续3种工作模式控制。
基于PLC控制器的气动机械手设计 基于PLC控制器的气动机械手设计
格式:pdf
大小:142KB
页数:3P
4.4
在工业生产中,机械手能够代替人手完成分拣、搬运、装卸等工作,不但减轻了工人的劳动强度,还提高了企业的自动化水平和生产效率。设计了基于plc控制器的气动机械手,包括方案设计、气动系统设计、控制系统设计和程序设计,以plc为控制核心,利用气压传动技术驱动机械手臂完成抓取和放置零件的动作,利用电机驱动机械手完成搬运的动作。通过样机的试制和系统的调试运行,表明气动机械手的设计方案是可行的,控制系统是稳定可靠的。
基于三菱PLC的四工位制壳机械手控制系统设计 基于三菱PLC的四工位制壳机械手控制系统设计
格式:pdf
大小:855KB
页数:4P
4.6
针对多工位制壳机械手的控制要求,开发了一种基于可编程逻辑控制器控制的四工位制壳机械手控制系统。它采用2台三菱可编程逻辑控制器并联通信,应用qd70p8定位模块、步进电机、检测传感器和人机界面等先进工控技术,解决了四工位工作的多点定位控制和检测要求。描述了机械手工作流程、控制要求和控制系统软硬件设计。实践表明,该控制系统能提高制壳生产效率、减轻工人劳动强度,具有推广应用价值。
PLC的气动机械手控制系统设计技术最新文档
基于PLC与触摸屏的工业搬运机械手控制系统设计 基于PLC与触摸屏的工业搬运机械手控制系统设计
格式:pdf
大小:1.5MB
页数:5P
4.3
为了提高工业自动线中工件的搬运效率,设计了五自由度搬运机械手控制系统。基于机械手的结构与功能,详细介绍了该机械手的硬件设计与软件编程思路。该系统以s7-200plc为控制核心,smart700ie作为监控界面。其运行结果表明,系统具有操作简单、运行稳定可靠、可视化等优点,不仅能够有效提高机械手的生产效率和自动化程度,还可实现运行过程的自动监控,具有较好的应用前景。
基于PLC的自动线机械手位置控制系统设计 基于PLC的自动线机械手位置控制系统设计
格式:pdf
大小:213KB
页数:未知
4.3
自动化生产线机械手在各生产模块之间传输工件,需要实现位置控制。自动线机械手的执行元件为伺服电动机,以西门子s7-200可编程控制器为控制中心,驱动松下伺服驱动器,伺服驱动器驱动伺服电动机,伺服电动机通过同步带传动带动机械手运动,可以实现机械手的准确位置控制。硬件结构简单,数量少,软件编程应用位置控制编程向导,也比较简单。
【毕业论文】基于西门子PLC机械手控制系统设计
格式:pdf
大小:3.5MB
页数:65P
4.5
基于西门子plc机械手控制系统设计 i 摘要 可编程控制器是在继电接触控制器的基础上,结合先进的微机技术发展起来的 一种新型的工业控制机。它发展迅速,应用广泛,特别适合于顺序控制,是机械自动 化中一种基础的控制设备。它将填补继电接触控制与微机数控之间的一大块空白。 此机械手系统是一个教学模型,它模拟工业生产过程中的某种自动化设备,可 以完成零组件的组装、检测、移送等任务。本文以该模型为例,论述了机械手的结 构组成及工作原理,提出了五种工作方式的控制要求,并针对这些控制要求提出了 s7-300型plc控制系统的控制方案,进而阐述了plc控制系统的设计过程以及步 进程序的梯形图实现方法,并在plc系统上进行了调试。实践证明,此机械手能 按预定的顺序动作,设计方案合理,控制特性良好,对应用plc进行工业设计有 一定的借鉴作用。 关键词:机械手,p

学士学位论文—-自动浇注机械手控制系统设计
格式:pdf
大小:504KB
页数:30P
4.6
信息工程学院自动浇注机械手控制系统设计 本科毕业设计 编号:20150105014 自动浇注机械手控制系统设计 designofautomaticpouringmanipulator controlsystem 姓名 学院信息工程学院 专业自动化 班级一班 学号 指导教师 2015年6月2日 信息工程学院自动浇注机械手控制系统设计 摘要 随着科学技术的日新月异,自动化程度要求越来越高,市场竞争激烈、人工成本 上涨,以往人工操作的搬运和固定式输送带为主的传统物件搬运方式,不但占用空间 也不容易更变生产线结构,加上需要人力监督操作,更增加生产成本,原有的生产装 料装置远远不能满足当前高度自动化的需要。减轻劳动强度,保障生产的可靠性、安 全性,降低生产成本,减少环境污染、提高产品的质量及经济效益是企业生成所必须 面临

PLC在液压机械手控制系统中的应用
格式:pdf
大小:56KB
页数:1P
4.6
本文主要分析讲解了plc在液压机械手控制系统中的具体应用,分别讲述了机械手具体系统的主要组成,plc机械手具体控制系统的使用功能,plc液压机械手具体的控制系统主要的工作原理以及运行模式以及机械手与plc接口等内容。
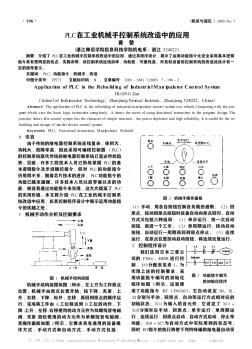
PLC在工业机械手控制系统改造中的应用
格式:pdf
大小:520KB
页数:3P
4.6
介绍了plc在工业机械手控制系统改造中的应用,通过其程序设计,展示了运用功能指令比完全采用基本逻辑指令具有更明显的优点。实践表明:该控制系统连线简单、功耗低、可靠性高;对类似设备的控制系统的改造或设计有一定的指导意义。
基于模式识别技术的采摘机械手控制系统设计与研究 基于模式识别技术的采摘机械手控制系统设计与研究
格式:pdf
大小:472KB
页数:5P
4.5
利用模式识别中的图像处理技术,采用ti公司sitara系列的am5728处理器,通过视觉系统和舵机驱动方法,实现了一套采摘机械手控制系统。试验结果表明:该采摘机械手控制系统,能够实现对目标果实的准确采摘,正确采摘率为89%,采摘一个苹果耗时9s,系统具有速度快、准确性高和可行性强等特点,能够满足一般的果实采摘,具有很好的实用性。
机械手的控制系统设计毕业论文
格式:pdf
大小:1.2MB
页数:24P
4.4
嘉兴职业技术学院毕业论文(设计) 嘉兴职业技术学院 毕业设计(论文) 题目名称:机械手的控制系统 姓名: 所在分院:机电与汽车分院 专业班级: 指导教师: 2014年6月1日 嘉兴职业技术学院毕业论文(设计) 摘要 机械手是近几十年发展起来的一种高科技自动化生产设备。通过编程来完成 各种动作,它的准确性和多自由度,保证了机械手能在各种不同的环境中工作。 机械手在工业生产中应用较多,机械手的使用能够显著的提高生产效率,减少人 为因素造成的废次品率。机械手可以完成很多工作,它在自动化车间中用来运送 物料,从事多种工艺操作。它的特点是通过编程来完成各种预期的作业,在构造 和性能上兼有人和机器人的部分优点,尤其体现了人的灵活协调和机器人的精确 到位。矚慫润厲钐瘗睞枥庑赖。 机械手是在机械自动化生产中逐步发展出的一种新型装置。现代生产过程中 机械手被广
气动机械手在齿轮加工中的选型设计 气动机械手在齿轮加工中的选型设计
格式:pdf
大小:201KB
页数:2P
4.4
齿轮作为基础的传动元件需求量巨大。齿轮加工方式近年来向高度自动化方向发展。其中上下料机械手的应用,体现出它不可替代的优点,机械手模拟人手动作,按照程序的设定和要求抓取、搬运、放置工件自动化装置,它能够提高产品质量和生产效率、降低工人劳动强度,气动机械手是一种高效环保的技术,其组成的气动元件具有多样化和标准化的特点,为设计选用提供了便利,并提高了设计的稳定性。
气动机械手在齿轮加工中的选型设计 气动机械手在齿轮加工中的选型设计
格式:pdf
大小:201KB
页数:2P
4.4
齿轮作为基础的传动元件需求量巨大。齿轮加工方式近年来向高度自动化方向发展。其中上下料机械手的应用,体现出它不可替代的优点,机械手模拟人手动作,按照程序的设定和要求抓取、搬运、放置工件自动化装置,它能够提高产品质量和生产效率、降低工人劳动强度,气动机械手是一种高效环保的技术,其组成的气动元件具有多样化和标准化的特点,为设计选用提供了便利,并提高了设计的稳定性。
PLC的气动机械手控制系统设计技术相关
文辑推荐
知识推荐
百科推荐


职位:土木工程师
擅长专业:土建 安装 装饰 市政 园林


