




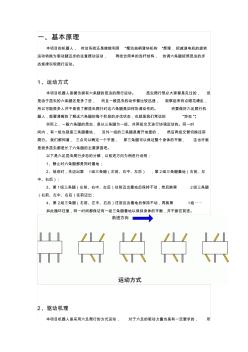
一、基本原理 本项目的机器人, 传动系统还是继续利用 “摆动曲柄滑块机构 ”原理,把减速电机的旋转 运动转换为驱动腿迈步的往复摆动运动, 再结合简单的连杆结构, 协调六条腿按照昆虫的步 态规律实现爬行运动。 1、运动方式 本项目机器人是模仿拥有六条腿的昆虫的爬行运动。 昆虫爬行想必大家都是见过的, 但 是由于昆虫的六条腿还是多了些, 而且一般昆虫的动作都比较迅速, 观察起来有点眼花缭乱, 所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。 而要做好六足爬行机 器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的 “步态”。 实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。同一时 间内,有一组也就是三条腿着地, 另外一组的三条腿是离开地面的, 然后两组交替切换往前 爬行。我们都知道, 三点可以确定一个平面, 即三条腿可以保证整个身体的平衡, 这
热门知识
武器机械原理图-
话题: 工程造价tangguanlun
-
话题: 建筑设计djan198555
-
话题: 结构设计yangtao1207
精华知识
武器机械原理图-
话题: 工程造价yinghua552
-
话题: 路桥市政ljsqlh2012
最新知识
武器机械原理图-
话题: 建筑设计yf17247380
武器机械原理图相关专题
- 卡特390D挖掘机图
- 卡纸用铅笔怎么画
- 开个图文店都需要什么
- 开式齿轮和闭式齿轮区别图
- 看不懂图纸怎么办
- 看过来照明系统图
- 看不懂图纸
- 看工程图纸用什么软件好
- 看通风、防排烟图纸问题
- 坎儿井原理示意图
- 中国机械工程学会授予材料热处理工程师资格人员名单
- 一拖一变频柜电气原理图(三晶VM1000B系列)
- 以杉木积成材为芯板的新型细木工板的动态热机械分析
- 以浙江省公路养护机械化的发展看筑养路机械市场需求
- 制定机械加工劳动定额切削用量时间标准若干问题
- 中国国际城市市政工程机械建筑机械及施工车辆展览会
- 中国农业机械学会
- 在线期刊——制冷空调与电力机械竞争的新着力点
- 中国林业机械协会关于向社会推荐木工机械产品的通知
- 以项目为导向实施机械测量技术课程教学改革
- 中国农业机械流通协会第三次会员代表大会
- 中国机械工程学会铸造学会
- 中国工程机械工业协会工业车辆分会理事会
- 中国工程机械学会工程起重机械分会
- 中国机械工业企业管理协会
- 深圳市领创精密机械有限公司
- 以项目为载体的机械设计基础课程探索与实践教学设计