





COMBINATION OF ROBOT CONTROL AND ASSEMBLY PLANNING FOR A PRECISION MANIPULATOOR Abstract This paper researches how to realize the automatic assembly operation on a two-finger precision manipulator. A multi-layer assembly support system is proposed. At the task-planning layer, based on the computer-aided design (CAD) model, the assembly sequence is first generated, and the information necessary
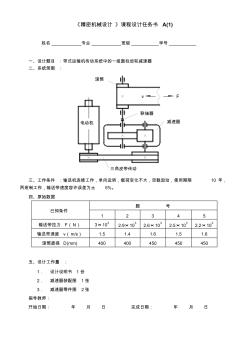
《精密机械设计 》课程设计任务书 A(1) 姓名 专业 班级 学号 一、设计题目 :带式运输机传动系统中的一级圆柱齿轮减速器 二、系统简图 : Fv 滚筒 联轴器 减速器 三角皮带传动 电动机 三、工作条件 :输送机连续工作,单向运转,载荷变化不大,空载起动,使用期限 10 年, 两班制工作,输送带速度容许误差为± 5%。 四、原始数据 已知条件 题 号 1 2 3 4 5 输送带拉力 F(N) 3×103 2.9×103 2.6×103 2.5×103 2.2×103 输送带速度 v(m/s) 1.5 1.4 1.6 1.5 1.6 滚筒直径 D(mm) 400 400 450 450 450 五、设计工作量 : 1. 设计说明书 1 份 2. 减速器装配图 1张 3. 减速器零件图 2张 指导教师: 开始日期: 年 月 日 完成日期: 年 月 日 《精密机械设计 》课程设计任务
热门知识
苏州合叶精密机械-
话题: 地产家居chenmin0571
-
话题: 给排水fanglue000
精华知识
苏州合叶精密机械-
话题: 地产家居qixing819688
最新知识
苏州合叶精密机械-
话题: 工程造价ftdzhulong
苏州合叶精密机械相关专题
- 胀管器苏州哪家最好
- 在苏州哪个品牌的墙纸好
- 外墙涂料计算苏州
- 苏州LED日光灯有没有好的
- 苏州LED显示屏维修
- 苏州pvc塑料件内部植绒
- 苏州地铁月票卡价格
- 苏州地铁造价每米多少
- 苏州房价为什么这么高
- 苏州凤凰b30水准仪大概价格
- 深圳市领创精密机械有限公司
- 关于苏州经贸职业技术学院新校区空调冷热源方案选择
- 基于WebGIS技术苏州市桥梁管理信息系统研制
- 工作场所有害因素检测委托协议苏州疾病预防控制中心
- 康力电梯成功中标苏州轨道交通二号线全线自动扶梯项目
- 借鉴与实践苏州工业园区城市规划建设及管理经验
- 康力电梯对苏州轨道交通2号线公交型扶梯全线满载测试
- 基于中国传统文化背景苏州私家园林角落空间形态营造
- 中国苏州智能建筑电气设计与技术应用论坛召开
- 苏州博物馆为例浅析传统中国装饰对现代建筑装饰的影响
- 智能配电监控系统苏州吴中区现代文体中心的设计与应用
- 苏州火车站改造设计
- 中国电源散热器应用和技术发展研讨会在苏州举行
- 苏州博物馆新馆建筑与陈列设计
- 垂直防渗技术在苏州市七子山垃圾填埋场扩建工程中的应用
- 动态规划的苏州工业园区内河港口规划及运作模式研究
- 合同总结报告表苏州普洛斯望亭物流园A地块仓库工程