




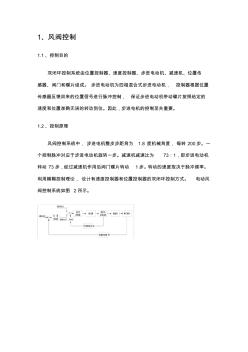
1、风阀控制 1.1、控制目的 双闭环控制系统由位置控制器、速度控制器、步进电动机、减速机、位置传 感器、阀门和碟片组成。 步进电动机为四相混合式步进电动机, 控制器根据位置 传感器反馈回来的位置信号进行脉冲控制, 保证步进电动机带动碟片按照给定的 速度和位置准确无误的转动到位。因此,步进电机的控制至关重要。 1.2、控制原理 风阀控制系统中, 步进电机整步步距角为 1.8 度机械角度, 每转 200步。一 个控制脉冲对应于步进电动机旋转一步。减速机减速比为 73:1,即步进电动机 转动 73步,经过减速机作用后阀门碟片转动 1步。转动的速度取决于脉冲频率。 利用模糊控制理论, 设计有速度控制器和位置控制器的双闭环控制方式。 电动风 阀控制系统如图 2所示。
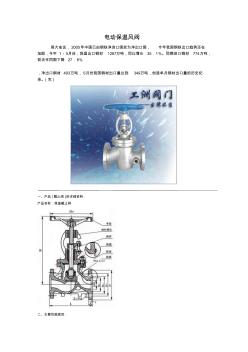
电动保温风阀 周大地说, 2005年中国已由钢铁净进口国变为净出口国, 今年我国钢铁出口趋势还在 加剧,今年 1-5月份,我国出口钢材 1267万吨,同比增长 35.1%。同期进口钢材 774万吨, 较去年同期下降 27.6% ,净出口钢材 493万吨, 5月份我国钢材出口量达到 349万吨,创造单月钢材出口量的历史纪 录。(完) 一、产品 [截止阀 ]的详细资料: 产品名称:保温截止阀 二、主要性能规范: 型号 公称压力 PN(MPa) 试验压力 PS(MPa) 适用温度 (℃) 适用介质 保温套压力 (MPa)壳体 密封 BJ41W-16P.R .C 1.6 2.4 1.8 ≤350 硝酸类 ≤1.0 BJ41W-25P.R .C 2.5 3.8 2.8 ≤350 硝酸类 ≤1.0 三、工洲牌保温截止阀 I 型主要外形尺寸和连接尺寸 (II 型法兰大一级 ): 型号 公称通 径 D
热门知识
pp电动手动风阀-
话题: 工程造价keivensars
-
话题: 工程造价xiaocai921
-
话题: 工程造价wangfangjiea
-
话题: 工程造价han362567122
精华知识
pp电动手动风阀-
话题: 建筑施工yjy8750610
最新知识
pp电动手动风阀-
话题: 工程造价zxj1300951
pp电动手动风阀相关专题
- 联塑PPR管为什么会敲破
- 联塑ppr管道怎么区别真假
- 联塑PPR管真假如何区别
- 中财ppr水管价格
- 中国ppr管十大名牌都有哪些
- 中国ppr管pvc管十大名牌
- 中国石材网app转让价格
- 阻燃pp塑料的价格是多少
- 最新ppr管十大品牌排行
- 做一个app需要花多少钱
- 支持并行工程和智能CAPP的制造资源建模技术
- 引入PPP模式的高标准农田建设及财政支持体系创新
- 政府和社会资本合作(PPP)项目物有所值评价
- 政府与社会资本合作(PPP)项目审计监督理论
- 中国电动汽车充电站市场现状与投资分析报告
- 在楼宇自控系统设计中如何选择最佳的电动调节阀口径
- 以电动葫芦为起升机构的简易强制式升降机钢丝绳检验
- 政府与社会资本合作(PPP)项目投资风险及其对策
- 整体提升脚手架和环链电动葫芦在高层建筑施工中应用
- 智慧城市建设运维的SOP和PPP模式
- 政府和社会资本合作项目(PPP)政府采购管理办法
- 永磁直流电动机—水泵系统由光伏电池供电的运行分析
- 政府和社会资本合作PPP项目用地涉及法律问题
- 增设Ⅱ型电动轮汽车主发电机磁场电流监测信号的构思
- 中国电动机制造产业分析及未来五年投资规划报告
- 增安型2/4极双速高压箱式空-水冷三相异步电动机
- 医院迁建工程建设项目PPP项目实施方案