





针对国内塔机行业大多还在延续手工焊接的生产方式,工人劳动强度大、作业条件差、生产效率低、产品质量不易控制等问题而严重制约企业发展的现象,对弧焊机器人应用于塔机转台的焊接技术进行了初步探讨.搭建了转台机器人焊接工作站,制定了工艺试验方案,并选定了最佳的焊接工艺参数.试验结果表明:采用弧焊机器人焊接塔机转台是行之有效的方法,确保了产品质量和生产效率,使其在实际作业中更安全、更有效、更平稳.
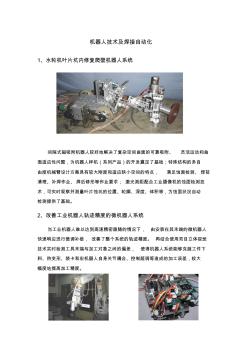
机器人技术及焊接自动化 1、水轮机叶片坑内修复爬壁机器人系统 间隙式磁吸附机器人较好地解决了复杂空间曲面的可靠吸附、 灵活运动和曲 面适应性问题,为机器人样机(系列产品)的开发奠定了基础;特殊结构的多自 由度机械臂设计方案具有较大刚度和适应狭小空间的特点, 满足蚀面检测、焊前 清理、补焊作业、焊后修形等作业要求; 激光测距配合工业摄像机的蚀面检测技 术,可实时观察并测量叶片蚀坑的位置、轮廓、深度、体积等,为蚀面状况自动 检测提供了基础。 2、改善工业机器人轨迹精度的微机器人系统 当工业机器人难以达到高速精密跟随的情况下, 由安装在其末端的微机器人 快速响应进行微调补偿, 改善了整个系统的轨迹精度。 再结合使用双目立体视觉 技术实时检测工具末端与加工对象之间的偏差, 使得机器人系统能够克服工件下 料、热变形、装卡和宏机器人自身关节耦合、控制超调等造成的加工误差,较大 幅度地提高加工精度。 3
otc铝焊机器人相关专题
- 卡箍的量是怎么算出来的
- 卡箍工程量问题
- 卡箍件的计算问题
- 卡箍如何计算
- 卡箍与法兰有何区别
- 卡簧尺寸怎么量
- 卡普隆雨棚做什么检验批
- 卡套接头的选用标准
- 卡箍连接管道
- 卡簧钳的型号是多少
- 能跨越水平窗框障碍的玻璃幕墙清洗机器人的设计
- 关于白车身装焊夹具设计及点焊机器人焊接仿真分析
- 串联机器人结构设计及有限元分析优化
- 基于NSGA-II算法管道清灰机器人变径机构优化
- 基于运动控制卡2PPa移动并联机器人控制系统
- 基于面向工业机器人控制器软PLC系统软件开发分析
- 机器人的机电一体化技术专业实训教学模式设计与研究
- 东北大学机器人科学与工程学院博士拟录取名单
- Modbus TCP协议水下机器人照明灯电压调节
- MSP430F169的电缆管道牵引机器人系统设计
- ADAMS的太阳能道路栏杆清洗机器人虚拟样机设计
- RS485总线的遥控机器人通讯系统设计和实现
- MATLAB的仿壁虎机器人天花板粘附运动仿真
- AT89C51控制的排水管道清淤机器人的设计
- ADAMS六足高层建筑清洁机器人的建模与仿真
- Internet的远程控制机器人系统结构设计
- Solidworks结构分析在水下机器人设计中的应用
- otdr光时域反射仪
- otdr光纤测试仪
- otdr光纤测试仪价格
- otg数据线
- otg数据线是什么
- otg线平板otg转接头
- otg线是什么
- otg转接头
- OTIS32电梯K1-15
- OTIS32电梯K1-6
- OTIS32电梯K7-9
- OTIS32电梯X1-2
- OTIS32电梯X3
- otis付门锁价格
- otis付门锁厂家
- otis付门锁批发
- otis付门锁生产商
- otis双向付门锁厂家
- otis双向付门锁品牌
- otl功率放大器
- OTL喷涂速凝橡胶沥青防水涂料
- otl音频功率放大器
- otm双电源
- otn传输网络测试仪
- ot开口铜鼻子
- ot缩宫素试剂盒
- Outdoor室外光缆
- ov7670摄像头模块
- ov9712高清镜头
- OVMAT矮塔斜拉桥环氧喷涂无粘结筋钢绞线拉索