





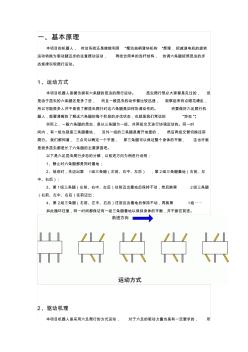
一、基本原理 本项目的机器人, 传动系统还是继续利用 “摆动曲柄滑块机构 ”原理,把减速电机的旋转 运动转换为驱动腿迈步的往复摆动运动, 再结合简单的连杆结构, 协调六条腿按照昆虫的步 态规律实现爬行运动。 1、运动方式 本项目机器人是模仿拥有六条腿的昆虫的爬行运动。 昆虫爬行想必大家都是见过的, 但 是由于昆虫的六条腿还是多了些, 而且一般昆虫的动作都比较迅速, 观察起来有点眼花缭乱, 所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。 而要做好六足爬行机 器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的 “步态”。 实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。同一时 间内,有一组也就是三条腿着地, 另外一组的三条腿是离开地面的, 然后两组交替切换往前 爬行。我们都知道, 三点可以确定一个平面, 即三条腿可以保证整个身体的平衡, 这
热门知识
蓝光强力昆虫粘捕器-
话题: 工程造价duolaameng36
-
话题: 建筑设计rebort3108
精华知识
蓝光强力昆虫粘捕器最新知识
蓝光强力昆虫粘捕器-
话题: 地产家居xuhui198665
-
话题: 工程造价yifangshui
蓝光强力昆虫粘捕器相关专题
- 蓝光东方天地开盘价多少
- 蓝光dvd刻录盘的寿命是多少
- 蓝光光盘寿命是多少
- 重庆蓝光林肯公园房价多少
- 五线蓝光水平仪价格
- 保护膜抗蓝光是什么意思
- 浅析如何防止LED蓝光危害
- 蓝光门窗价格
- 蓝光采购材料招标
- 蓝光招标采购平台
- 基于压电堆驱动器的喷嘴挡板式气体控制阀
- 多逆变器太阳能光伏并网发电系统的组群控制方法
- 一体式膜-生物反应器中膜面污泥沉积速率及其影响因
- 定征复合板材粘接层性质的非线性超声兰姆波方法
- 高效率PWM/PFM自动切换升压转换器的设计
- 智能建筑虚拟仪器监控系统与控制网络的接口技术
- 新型贴片式户外全彩LED显示屏用途的显示器件
- 用于电视调谐器的宽带CMOS低噪声放大器设计
- 基于CMOS工艺的二维风速传感器的设计和测试
- 整流变压器技术规格书(2016.7.5定稿)资料
- 伊东东兴化工氯碱综合利用项目压力容器冬季施工方案
- 中国读卡器市场现状分析及未来五年发展前景分析报告
- 永磁操动机构应用于126kV高压真空断路器
- 正泰电气ZN85-40.5户内高压交流真空断路器
- 断路器常识
- 中国电器工业协会电焊机分会第七届会员大会
- 医用直线加速器机房升级改造中的主要问题及解决方案