
- 首页 >
- > 机器人自动焊圆弧编程
更新时间:2025.01.26




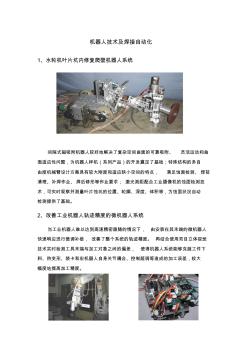
机器人技术及焊接自动化 1、水轮机叶片坑内修复爬壁机器人系统 间隙式磁吸附机器人较好地解决了复杂空间曲面的可靠吸附、 灵活运动和曲 面适应性问题,为机器人样机(系列产品)的开发奠定了基础;特殊结构的多自 由度机械臂设计方案具有较大刚度和适应狭小空间的特点, 满足蚀面检测、焊前 清理、补焊作业、焊后修形等作业要求; 激光测距配合工业摄像机的蚀面检测技 术,可实时观察并测量叶片蚀坑的位置、轮廓、深度、体积等,为蚀面状况自动 检测提供了基础。 2、改善工业机器人轨迹精度的微机器人系统 当工业机器人难以达到高速精密跟随的情况下, 由安装在其末端的微机器人 快速响应进行微调补偿, 改善了整个系统的轨迹精度。 再结合使用双目立体视觉 技术实时检测工具末端与加工对象之间的偏差, 使得机器人系统能够克服工件下 料、热变形、装卡和宏机器人自身关节耦合、控制超调等造成的加工误差,较大 幅度地提高加工精度。 3

针对国内塔机行业大多还在延续手工焊接的生产方式,工人劳动强度大、作业条件差、生产效率低、产品质量不易控制等问题而严重制约企业发展的现象,对弧焊机器人应用于塔机转台的焊接技术进行了初步探讨.搭建了转台机器人焊接工作站,制定了工艺试验方案,并选定了最佳的焊接工艺参数.试验结果表明:采用弧焊机器人焊接塔机转台是行之有效的方法,确保了产品质量和生产效率,使其在实际作业中更安全、更有效、更平稳.
热门知识
机器人自动焊圆弧编程-
话题: 地产家居aaa999999999
精华知识
机器人自动焊圆弧编程最新知识
机器人自动焊圆弧编程-
话题: 工程造价chinalong122
-
话题: 地产家居huangwenying
专题概述
机器人自动焊圆弧编程知识来自于造价通云知平台上百万用户的经验与心得交流。 注册登录 造价通即可以了解到相关机器人自动焊圆弧编程最新的精华知识、热门知识、相关问答、行业资讯及精品资料下载。同时,造价通还为您提供材价查询、测算、询价、云造价等建设行业领域优质服务。手机版访问:机器人自动焊圆弧编程
相关话题
资料下载
相关资讯
机器人自动焊圆弧编程相关专题
- 制作石灰膏有什么机器
- 做锅把手用的胶木粉机器
- 用什么机器破水泥路好
- 加工封口胶要用哪几台机器
- 粉碎石灰岩都用哪些机器
- 生产石膏线机器设备有哪些
- 生产胶布的机器叫什么
- 石材加工机器哪家好
- 石膏线条机器哪有卖的
- 石灰石生产线需要什么机器
- 电气工程及其自动化特色专业建设探索
- 逆变TIG焊机接触引弧电路的设计(引弧电路)
- 智能化技术在电气工程自动化控制中的应用与实践研讨
- 中国焊接学会堆焊及表面工程专委会
- 高效率PWM/PFM自动切换升压转换器的设计
- 起重机主梁工字钢磨损及焊接变形的检验案列分析
- 智能建筑火灾自动报警与消防联动系统设计及应用效果
- 异种钢焊接接头退火工艺
- 中国电器工业协会电焊机分会五届五次理事会
- 止回阀是指依靠介质本身流动而自动开闭阀瓣用来防止
- 云南造价咨询服务收费自动计算表〔2O12〕66号
- 永煤矿区铁路道口栏门自动联锁控制电路技改方案
- 基于GIS的矿产资源的潜力评价的自动制图模型
- 中国电器工业协会电焊机分会四届八次理事会会议纪要
- 能跨越水平窗框障碍的玻璃幕墙清洗机器人的设计
- 以色列CQM-换热器自动清洗装置ATCS技术介绍
- 圆钢管混凝土T型焊接节点应力强度因子计算方法