




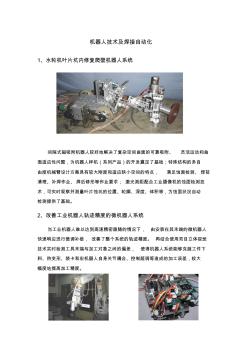
机器人技术及焊接自动化 1、水轮机叶片坑内修复爬壁机器人系统 间隙式磁吸附机器人较好地解决了复杂空间曲面的可靠吸附、 灵活运动和曲 面适应性问题,为机器人样机(系列产品)的开发奠定了基础;特殊结构的多自 由度机械臂设计方案具有较大刚度和适应狭小空间的特点, 满足蚀面检测、焊前 清理、补焊作业、焊后修形等作业要求; 激光测距配合工业摄像机的蚀面检测技 术,可实时观察并测量叶片蚀坑的位置、轮廓、深度、体积等,为蚀面状况自动 检测提供了基础。 2、改善工业机器人轨迹精度的微机器人系统 当工业机器人难以达到高速精密跟随的情况下, 由安装在其末端的微机器人 快速响应进行微调补偿, 改善了整个系统的轨迹精度。 再结合使用双目立体视觉 技术实时检测工具末端与加工对象之间的偏差, 使得机器人系统能够克服工件下 料、热变形、装卡和宏机器人自身关节耦合、控制超调等造成的加工误差,较大 幅度地提高加工精度。 3

Industrial Robot: An International Journal The Pransky interview: Dr Steve Cousins, CEO, Savioke, Entrepreneur and Innovator Joanne Pransky Article information: To cite this document: Joanne Pransky , (2016),"The Pransky interview: Dr Steve Cousins, CEO, Savioke, Entrepreneur and Innovator", Industrial Robot: An International Journal, Vol. 43 Iss 1 pp. 1 - 5 Permanent link to this document: http:/
机器人焊接夹具相关专题
- 开钢管厂需要什么机器
- 括涂料的机器有
- 制造钢丝球的机器多少钱
- 铸铁井盖机器多少钱一台
- 自动砌砖机器人有卖
- 做加气砖的机器叫什么名字
- 做干豆腐的机器多少钱
- 做塑料篷布需要什么机器
- 蒸汽机器人多少钱
- 挣钱小机器
- 中国焊接学会堆焊及表面工程专委会
- 起重机主梁工字钢磨损及焊接变形的检验案列分析
- 引子渡水电站溢洪道弧形工作闸门焊接变形与处理
- 能跨越水平窗框障碍的玻璃幕墙清洗机器人的设计
- 圆钢管混凝土T型焊接节点应力强度因子计算方法
- 圆钢管KK型搭接节点内隐藏焊缝焊接与否有限元分析
- 圆钢管混凝土K型焊接管板节点试验和有限元分析
- 中国工程建设焊接协会全国优秀焊接工程
- 制作质量对塔式起重机结构件焊接节点疲劳性能的影响
- 改善超高压电缆金属铝护套氩弧焊焊接质量方法
- 工程机械行业焊接与切割应用现状及关键技术发展趋势
- 杠杆零件机械加工工艺规程及专用夹具设计说明书资料
- 国内外焊接内螺纹铜管与无缝内螺纹铜管技术发展状况
- 埋弧焊焊接工艺及操作方法
- 关于白车身装焊夹具设计及点焊机器人焊接仿真分析
- 基于BP神经网络5A06铝合金电子束焊接熔深预测
- 串联机器人结构设计及有限元分析优化