





为了将功能性电刺激技术应用于肢体运动康复,开发一种用于下肢肢体功能重建与运动康复的脚踏车系统,提出了基于电机辅助功能性电刺激脚踏车系统模型,系统包括运动学模型、动力学模型、肌肉刺激模型、电机模型及负载模型.通过Matlab/Simulink平台建立仿真模型.将实验数据作为输入数据代入模型进行运算.仿真结果与实际实验结果对比,表明模型输出结果与实际结果基本吻合,证明了模型的正确性,为基于模型的功能性电刺激脚踏车闭环反馈控制系统的研制奠定基础.利用该方法可以克服系统启动和负载变化引起的刺激器大脉宽刺激电流输出,可降低肌肉疲劳速度保证训练效果.
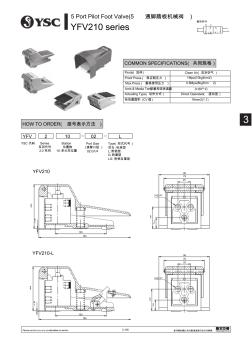
5 Port Pilot Foot Valve(5 通脚踏板机械阀 ) YFV210 series B A R2 P R1 COMMON SPECIFICATIONS( 共同规格 ) 022 10YFV L YSC代码 Series 系列代号 2:2系列 Station 位置数 10:单头双位置 ( ) 02:G1/4 Port Size 接管口径 Type( 形式代号 空白 :标准型 L:附锁型 G:附罩型 LG: 附锁及罩型 ) HOW TO ORDER( 型号表示方法 ) Fluids( 流体 ) Proof Press.( 保证耐压力 ) Max.Press.( 最高使用压力 ) Actuating Type( 动作方式 ) Amb & Media Temp.(环境和流体温度) Clean Air( 洁净空气 ) 1Mpa(10kgf/cm2) 0.8Mpa(
脚踏发电机相关专题
- 脚踏开关的作用主要有哪些
- 脚踏开关有四条线怎么接
- 脚踏冲洗阀用单独套价吗
- 脚踏充气泵什么品牌好
- 脚踏式冲洗阀有几种规格
- 气动脚踏泵工作原理
- 脚踏拉坯机
- 脚踏阀招标文件
- 脚踏式垃圾桶招标文件
- 大便器脚踏阀招标文件
- 柘溪水电厂扩建工程发电机出口设置GCB优越性
- 增设Ⅱ型电动轮汽车主发电机磁场电流监测信号的构思
- 基于CC2430水轮发电机组无线振摆监测系统
- 基于NX水轮发电机定子线棒参数化建模方法
- 某核电厂汽轮发电机基座120m以下结构施工方案
- 毛尖山水电站发电机转子线圈更新过程中整体配重
- 乐滩水电厂400V厂用电备用电源柴油发电机组增设
- 基于变精度粗糙集柴油发电机排气阀故障诊断方法
- 基于有向无环图支持向量机水轮发电机组故障诊断模型
- 汽轮发电机组安装部分
- 1000MW超超临界火电机组发电机氢气控制装置改造分析
- 30KWHDY30鸿都玉柴发电机组技术参数
- KW及以上发电机组几点技术交流解析
- 医院人防工程电气设计柴油发电机容量计算及选择负荷计算
- 3KW三相异步电动机改装成三相异步发电机的实践尝试网式
- 50KW柴油发电机报价
- 李家峡水电站水轮发电机组推力外循环系统降油压运行分析