




摩托车车架机器人焊接夹具的设计 进入 20世纪 90年代以来,随着我国改革步伐的加快和国民经济的高速发展, 一些企业也相应地以“更新装备,加强技术改造,适应市场需求,生产有竞争力的 产品,稳定提高企业效益”作为企业求生存、图发展的关键措施之一。在此背景下, 在机械制造业中使用焊接机器人的数量也急剧增加。目前,国内各大摩托车生产企 业都在上自动化生产线,如何更好的实现摩托车车架焊接生产自动化,日产焊接机 器人及变位机都能满足自动化要求,自动化生产线能否正常运转,除工艺流程是否 合理、零件精度是否满足要求外,焊接夹具设计的合理性最为重要。 一、机器人焊接工装夹具的特点 机器人焊接工装夹具与普通焊接夹具比较有如下特点: ⑴对零件的定位精度要求更高,焊缝相对位置精度较高,应≤ 1mm。 ⑵由于焊件一般由多个简单零件组焊而成,而这些零件的装配和定位焊,在焊接 工装夹具上是按顺序进行的,因此,它们的定
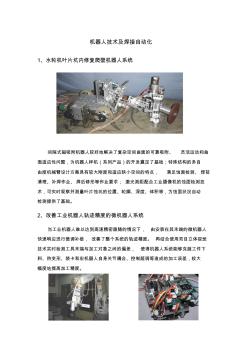
机器人技术及焊接自动化 1、水轮机叶片坑内修复爬壁机器人系统 间隙式磁吸附机器人较好地解决了复杂空间曲面的可靠吸附、 灵活运动和曲 面适应性问题,为机器人样机(系列产品)的开发奠定了基础;特殊结构的多自 由度机械臂设计方案具有较大刚度和适应狭小空间的特点, 满足蚀面检测、焊前 清理、补焊作业、焊后修形等作业要求; 激光测距配合工业摄像机的蚀面检测技 术,可实时观察并测量叶片蚀坑的位置、轮廓、深度、体积等,为蚀面状况自动 检测提供了基础。 2、改善工业机器人轨迹精度的微机器人系统 当工业机器人难以达到高速精密跟随的情况下, 由安装在其末端的微机器人 快速响应进行微调补偿, 改善了整个系统的轨迹精度。 再结合使用双目立体视觉 技术实时检测工具末端与加工对象之间的偏差, 使得机器人系统能够克服工件下 料、热变形、装卡和宏机器人自身关节耦合、控制超调等造成的加工误差,较大 幅度地提高加工精度。 3
热门知识
焊接自动化设备-
话题: 工程造价tracy_qing
精华知识
焊接自动化设备-
话题: 工程造价19870308zj
最新知识
焊接自动化设备-
话题: 水利水电yuangujiong
-
话题: 工程造价152****5930
焊接自动化设备相关专题
- 铸铁阀门有裂缝怎么焊接
- 建筑施工中钢筋焊接长度
- 焊接法兰阀门需要法兰片不
- 焊接钢管内防腐怎么施工
- 焊接施工单价如何确定
- 焊接式阀门如何试压
- 工地大门是怎么焊接的
- 现执行的国家焊接施工标准
- 干挂石材挂件能否焊接
- 高层建筑均压环焊接
- 电气工程及其自动化特色专业建设探索
- 智能建筑工程报警与电视监控系统前端设备的安装施工
- 有源配电网设备利用率影响因子体系及其价值计算方法
- 正压送风对降低污水厂设备腐蚀的作用与实践(论文)
- 原材料(设备)合格证、试验报告汇总表碎石
- 智能建筑工程设计中的机电设备集成配置系统总体设计
- 新型的低压成套开关设备GGD型低压配电柜
- 智能化技术在电气工程自动化控制中的应用与实践研讨
- 中国焊接学会堆焊及表面工程专委会
- 智能建筑智能化工程名词解释-通信系统设备安装工程
- 政府投资工程类项目材料设备采购风险浅析及应对策略
- 执行设备工程监理规范提升地铁设备监理服务质量
- 以可靠性为中心的修在医疗设备维修领域的应用综述
- 一体化载体循环生物处理设备处理生活污水的中试
- 起重机主梁工字钢磨损及焊接变形的检验案列分析
- 因工程施工、设备维修等原因确需停止供水审批申请表
- 中国哈尔滨国际水处理给排水设备及泵阀管道展会概况