




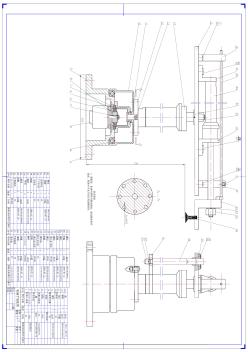
摘 要 在当今大规模制造业中, 企业为提高生产效率, 保障产品质量, 普遍重视生 产过程的自动化程度, 工业机器人作为自动化生产线上的重要成员, 逐渐被企业 所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家 工业自动化的水平, 目前,工业机器人主要承担着焊接、 喷涂、搬运以及堆垛等 重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。 本文将设计一台四自由度的工业机器人,用于给冲压设备运送物料。首先, 本文将设计机器人的底座、 大臂、小臂和机械手的结构, 然后选择合适的传动方 式、驱动方式,搭建机器人的结构平台; 在此基础上,本文将设计该机器人的控 制系统,包括数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、 端 子板电路的设计以及控制软件的设计, 重点加强控制软件的可靠性和机器人运行 过程的安全性, 最终实现的目标包括: 关节的伺服控制和制动问题、
热门知识
桁架机械手图纸-
话题: 地产家居maomao12388
精华知识
桁架机械手图纸-
话题: 工程造价zhong63879
最新知识
桁架机械手图纸-
话题: 工程造价woxiang530
-
话题: 地产家居babybear8370
-
话题: 工程造价Cecilia9_9
桁架机械手图纸相关专题
- 桁架结构的桁架桥
- 桁架结构缺点
- 桁架结构的桁架种类
- 桁架结构中零杆的作用
- 钢桁架桥结构受力特点
- 钢结构桁架如何起拱
- 钢结构网架和桁架区别
- 什么是桁架结构的节间
- 如何搭建这种桁架结构
- 三角桁架结构的桥优点
- 中博会展中心C1区钢结构屋面大型主桁架的施工技术
- 支座边界及屋面支撑对张弦桁架结构施工过程影响分析
- 医疗垃圾破碎机破碎装置的结构设计含全套CAD图纸
- 引大入秦庄浪河渡槽预应力钢筋混凝土桁架拱施工监理
- 机械设计图纸标注知识工程制图标注标注方法、方式要点
- 基于ActiveX技术电力工程图纸管理系统
- 国际家居商务港A馆(A9)钢管桁架施工组织设计方案
- 国际家居商务港A馆(A9)钢管桁架施工组织设计方案
- 基于MIDASU型荧光灯接桥机工位机械手模态分析
- 基于ADAMS新型铝锭堆垛机械手运动学仿真与分析
- 基于PLC控制机械手系统控制毕业设计论文开题报告
- 某大型甲级设计院电气设计图纸
- 某高铁车站站台雨棚钢结构施工方案(H钢柱、管桁架)
- 某大厦幕墙工程施工方案(张悬索桁架点式幕墙管桁架)
- 基于机械手施工隧道湿喷混凝土质量主要影响因素
- 基于粒子群优化算法(PSO)张弦桁架结构优化设计
- 基于无机械手圆盘式刀库卧式加工中心换刀系统