





在巡检机器人控制系统硬件平台上移植了μC/OS-II嵌入式操作系统;根据该控制系统的实际功能需求,进行了系统主要任务的设计与分配;最后对巡检机器人远程控制平台的显示界面进行了功能性的设计,实现电力隧道巡检机器人远程控制平台与巡检机器人硬件终端的交互功能。
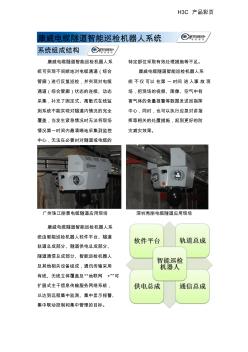
H3C 产品彩页 康威电缆隧道智能巡检机器人系 统可实现不间断地对电缆通道(综合 管廊)进行反复巡检,并实现对电缆 通道(综合管廊)状态的连续、动态 采集,补充了固定式、离散式在线监 测系统不能实现对隧道内情况的完全 覆盖,当发生紧急情况时无法将现场 情况第一时间内最清晰地采集到监控 中心,无法在必要时对隧道或电缆的 特定部位采取有效处理措施等不足。 康威电缆隧道智能巡检机器人系 统不仅可以 在第 一时间 进入事 故现 场,把现场的视频、图像、空气中有 害气体的含量报警等数据发送回指挥 中心,同时,也可以执行应急对讲指 挥等相关的处置措施,起到更好的防 灾减灾效果。 广州珠江丽景电缆隧道应用现场 深圳秀丽电缆隧道应用现场 康威电缆隧道智能巡检机器人系 统由智能巡检机器人软件平台、隧道 轨道总成部分、隧道供电总成部分、 隧道通信总成部分、智能巡检机器人 及其他相关设备组成,通讯传输采用 有线
热门知识
高压线巡检机器人-
话题: 工程造价xinyi10000
-
话题: 电气工程sunshine0828
精华知识
高压线巡检机器人-
话题: 工程造价yj19860909
最新知识
高压线巡检机器人-
话题: 项目管理linbin2005
-
话题: 工程造价hnzhuyonghua
高压线巡检机器人相关专题
- 开关电源为什么要打高压
- 开关电源为什么打高压
- 考高压电工值班证
- 了解高压电容柜的高手请进
- 利仁电高压锅如何操作
- 纸在高压电下能导电
- 自动管道增压泵有高压电吗
- 怎样让低压直流电变高压
- 怎样使用高压接地捧
- 直流高压发生器的用途
- 能跨越水平窗框障碍的玻璃幕墙清洗机器人的设计
- 关于白车身装焊夹具设计及点焊机器人焊接仿真分析
- 串联机器人结构设计及有限元分析优化
- 国际西苑住宅小区1#、2#楼高压线防护专项施工方案
- 基于UWB和GIS变电站智能巡检系统设计与实现
- 基于NSGA-II算法管道清灰机器人变径机构优化
- 基于运动控制卡2PPa移动并联机器人控制系统
- 基于面向工业机器人控制器软PLC系统软件开发分析
- 巡检功能消防联动星三角降压启动水泵电气控制柜控制说明
- 特大桥临近220kv高压线安全专项施工方案教学文案
- 三相四线制如何区分零线火线高压线三相零线怎么来的
- GB1000.1-1988高压线路针式瓷绝缘子技术条件
- LED导轨射灯系列巡检报表
- 1000kV特高压线路接地模块的选型原则与施工关键研究
- 机器人的机电一体化技术专业实训教学模式设计与研究
- 东北大学机器人科学与工程学院博士拟录取名单
- 产品目录一多功能消防专用自动巡检控制设备系列