




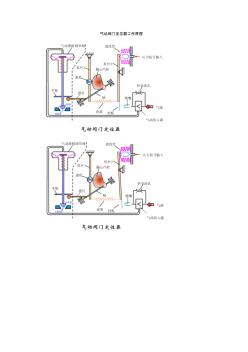
气动阀门定位器工作原理 气动阀门定位器是按力平衡原理设计工作的, 其工作原理方框见上图所示, 它是按力平衡原 理设计和工作的。 如图上图所示当通入波纹管的信号压力增加时,使杠杆 2 绕支点转动,档板靠近喷嘴, 喷嘴背压经放大器放大后, 送入薄膜执行机构气室, 使阀杆向下移动, 并带动反馈杆 (摆杆) 绕支点转动,连接在同一轴上的反馈凸轮 (偏心凸轮)也跟着作逆时针方向转动, 通过滚轮 使杠杆 1 绕支点转动, 并将反馈弹簧拉伸、 弹簧对杠杆 2的拉力与信号压力作用在波纹管上 的力达到力矩平衡时仪表达到平衡状态。 此时,一定的信号压力就与一定的阀门位置相对应。 以上作用方式为正作用, 若要改变作用方式,只要将凸轮翻转 ,A 向变成 B 向等, 即可。 所谓正作用定位器, 就是信号压力增加, 输出压力亦增加;所谓反作用定位器,就是信号压 力增加,输出压力则减少。 一台正作用执行机构只要装上
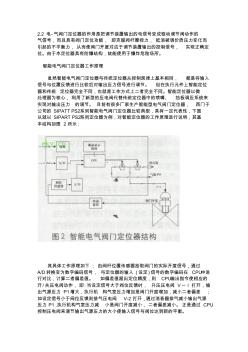
2.2 电-气阀门定位器的作用是把调节装置输出的电信号变成驱动调节阀动作的 气信号,而且具有阀门定位功能, 即克服阀杆摩控力, 抵消被调价质压力变化而 引起的不平衡力, 从而使阀门开度对应于调节装置输出的控制信号, 实现正确定 位。由于本定位器具有防爆结构,故能使用于爆炸危险场所。 智能电气阀门定位器工作原理 虽然智能电气阀门定位器与传统定位器从控制规律上基本相同, 都是将输入 信号与位置反馈进行比较后对输出压力信号进行调节。 但在执行元件上智能定位 器和传统 定位器完全不同,也就是工作方式上二者完全不同。智能定位器以微 处理器为核心,利用了新型的压电阀代替传统定位器中的喷嘴、 挡板调压系统来 实现对输出压力 的调节。 目前有很多厂家生产智能型电气阀门定位器, 西门子 公司的 SIPATT PS2系列智能电气阀门定位器比较典型,具有一定代表性,下面 以就以 SIPART PS2系列定位器为
阀门定位器工作原理相关专题
- 卡套式阀门套什么定额
- 可变阀门排气管有多少种
- 铸钢阀门比铸铁的贵的多吗
- 铸钢阀门比铸铁的贵多少
- 铸钢阀门标准以及规格
- 铸钢法兰阀门套什么定额
- 铸钢阀门的主要材料有哪些
- 转换阀门价格一般是多少
- 自动关闭阀门的电子流量计
- 怎样才算打开煤气阀门
- 在全县非煤矿山和危化企业安全生产工作会议上的讲话
- 一拖一变频柜电气原理图(三晶VM1000B系列)
- 水利管理单位信访工作
- 在2017年全省水利宣传工作会议上的讲话(节选)
- 以工作过程为导向构建高职建筑工程技术专业课程体系
- 中国城市公共交通协会信息工作委员会年会
- 建设工程资料的归档工作
- 中国石油西藏销售分公司施工作业HSE计划书
- 在创新中求发展——乐山市土地储备中心工作创新纪实
- 以信息化建设为切入点 推动“三基”工作全面落实
- 以工作任务为载体的安装工程造价课程教学改革与实践
- 圆锥碎矿机工作原理、技术参数、安装调试及维护检修
- 在城乡统筹就业和劳动社会保障试点工作会议上的讲话
- 月份安全工作总结(20200812144457)
- 中国总会计师协会民营企业分会换届工作
- 中共XX市纪委驻市委组织部纪检组工作手册
- 中国电科院电力安全工作规程专项培训